
Abstract
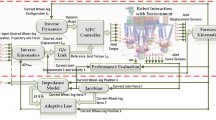
Dynamic balance of mobile robots is a challenging research because of its complex nonlinearity and dynamics. This study proposes a dynamic balance control (DBC) method to enhance the stability and presents a virtual control strategy that could help the operators manipulate the robot remotely. Considering vibration absorption, the robot employs semi-active suspension systems that are capable of reducing the vibration induced by rough terrain. But the systems aggravate unbalance when the robot starts/stops rapidly and the manipulator performs tasks after the robot locked onto a target. Aiming to minimize the unbalance, the DBC method is presented by combining the off-line input voltage sha** and real-time stability compensation. On the basis of it, through building the dynamic model of the robot, the unbalance can be eliminated by regulating the input voltage of motors installed in driving wheels and actuated joints. Further, for reducing the unbalance caused by external shock from the unevenness of pavement surface, the study seeks to apply the force-angle stability margin to measure the stability. For experimental study, the virtual reality technology is used to develop a visualized remote control system, which is realized by using WiMax to transmit the commands and remote desktop from the lower computer to upper computer. Finally, the proposed method is demonstrated on a suspended wheeled mobile manipulator by simulations and experiments.

















Similar content being viewed by others

References
Korayem, M.H., Zehfroosh, A., Tourajizadeh, H., Manteghi, S.: Optimal motion planning of non-linear dynamic systems in the presence of obstacles and moving boundaries using SDRE: application on cable-suspended robot. Nonlinear Dyn. 76, 1423–1441 (2014)
Alipour, K., Moosavian, S.A.A.: Effect of terrain traction, suspension stiffness and grasp posture on the tip-over stability of wheeled robots with multiple arms. Adv. Robot. 26, 817–842 (2012)
Zhong, G., Kobayashi, Y., Emaru, T., Hoshino, Y.: Optimal control of the dynamic stability for robotic vehicles in rough terrain. Nonlinear Dyn. 73, 981–992 (2013)
Murphy, L., Newman, P.: Risky planning on probabilistic costmaps for path planning in outdoor environments. IEEE Trans. Robot. 29, 445–457 (2013)
Zhong, G., Kobayashi, Y., Emaru, T., Hoshino, Y.: Approaches based on particle swarm optimization for problems of vibration reduction of suspended mobile robot with a manipulator. J. Vib. Control 20, 3–23 (2014)
Tomei, P.: A simple PD controller for robots with elastic joints. IEEE Trans. Autom. Control 36, 1208–1213 (1991)
Kugi, A., Ott, C., Albu-Schaffer, A., Hirzinger, G.: On the passivity-based impedance control of flexible joint robots. IEEE Trans. Robot. Autom. 24, 416–429 (2008)
Yagiz, N., Hacioglu, Y.: Fuzzy sliding modes with moving surface for the robust control of a planar robot. J. Vib. Control 11, 903–922 (2005)
Nieto, A.J., Morales, A.L., Trapero, J.R., Chicharro, J.M., Pintado, P.: An adaptive pneumatic suspension based on the estimation of the excitation frequency. J. Sound Vib. 330, 1891–1903 (2011)
Zeman, V., Patel, R.V., Khorasani, K.: Control of a flexible joint robot using neural networks. IEEE Trans. Control Syst. Technol. 5, 453–462 (1997)
Kumar, R.: Effective active vibration control of single link flexible manipulator with modified positive position feedback control in the presence of instrumentation phase lead/lag. J. Vib. Control 19, 1538–1560 (2013)
Zhong, G., Kobayashi, Y., Hoshino, Y., Emaru, T.: System modeling and tracking control of mobile manipulator subjected to dynamic interaction and uncertainty. Nonlinear Dyn. 73, 167–182 (2013)
Messuri, D.A., Klein, C.A.: Automatic body regulation for maintaining stability of legged vehicles during rough-terrain locomotion. IEEE J. Robot. Autom. 1, 132–141 (1985)
Ghasempoor, A., Sepehri, N.: A measure of machine stability for moving base manipulators. In: Proceedings of IEEE International Conference on Robotics and Automation (ICCA 1995), pp. 2249–2254 (1995)
Hirose, S., Tsukagoshi, H., Yoneda, K.: Normalized energy stability margin: generalized stability criterion for walking vehicles. In: Proceedings of International Conference on Climbing and Walking Robots (ICCWR 1998), pp. 71–76 (1998)
Garcia, E., Santos, P.A.G.: A new dynamic energy stability margin for walking machines. In: Proceedings of International Conference on Advanced Robotics (ICAR 2003), pp. 1014–1019 (2003)
Lin, B.S., Song, S.M.: Dynamic modeling, stability and energy efficiency of a quadrupedal walking machine. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA 1993), pp. 367–373 (1993)
Kim, D.W., Kim, N.H., Park, G.T.: ZMP based neural network inspired humanoid robot control. Nonlinear Dyn. 67, 793–806 (2012)
Chen, C.Y., Shih, B.Y., Shih, C.H., Wang, L.H.: Design, modeling and stability control for an actuated dynamic walking planar bipedal robot. J. Vib. Control 19, 376–384 (2013)
Nagatani, K., Kiribayashi, S., Okada, Y., Otake, K., Yoshida, K., Tadokoro, S., Kawatsuma, S.: Emergency response to the nuclear accident at the Fukushima Daiichi nuclear power plants using mobile rescue robots. J. Field Robot. 30, 44–63 (2013)
Forouzantabar, A., Talebi, H.A., Sedigh, A.K.: Adaptive neural network control of bilateral teleoperation with constant time delay. Nonlinear Dyn. 67, 1123–1134 (2012)
Hainsworth, D.W.: Teleoperation user interfaces for mining robotics. Auton. Robot. 11, 19–28 (2001)
Cui, F., Zhang, M., Cui, G., Wu. X.: A robot teleoperation system based on virtual reality and WLAN. In: Proceedings of the 6th World Congress on Intelligent Control and Automation (WCICA 2006), pp. 9193–9197 (2006)
Livatino, S., Muscato, G., Privitera, F.: Stereo viewing and virtual reality technologies in mobile robot teleguide. IEEE Trans. Robot. 25, 1343–1355 (2009)
Chen, C.Y., Huang, P.H.: Review of an autonomous humanoid robot and its mechanical control. J. Vib. Control 18, 973–982 (2012)
Sarkar, N., Yun, X., Kumar, V.: Control of mechanical systems with rolling constraints application to dynamic control of mobile robots. Int. J. Robot. Res. 13, 55–69 (1994)
Zhong, G., Kobayashi, Y., Emaru, T., Hoshino, Y.: Trajectory tracking of wheeled mobile robot with a manipulator considering dynamic interaction and modeling uncertainty. In: Intelligent Robotics and Applications, pp. 366–375. Springer, Berlin (2012)
Tayebi, A., Tad**e, M., Rachid, A.: Invariant manifold approach for the stabilization of nonholonomic chained systems: application to a mobile robot. Nonlinear Dyn. 24, 167–181 (2001)
Fateh, M.M., Babaghasabha, R.: Impedance control of robots using voltage control strategy. Nonlinear Dyn. 74, 277–286 (2013)
Henry, P., Krainin, M., Herbst, E., Ren, X., Fox, D.: RGBD map**: using Kinect-style depth cameras for dense 3D modeling of indoor environments. Int. J. Robot. Res. 31, 647–663 (2012)
Yoshida, T., Nagatani, K., Tadokoro, S., Nishimura, T., Koyanagi, E.: Improvements to the rescue robot quince toward future indoor surveillance missions in the Fukushima Daiichi nuclear power plant. In: Field and Service Robotics. Springer, Berlin (2014)
Acknowledgments
This research is supported by National Natural Science Foundation of China (Grant No. 51405515) and National Basic Research Program of China (Grant No. 2013CB035504).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhong, G., Deng, H., Kobayashi, Y. et al. Theoretical and experimental study on remote dynamic balance control for a suspended wheeled mobile manipulator. Nonlinear Dyn 79, 851–864 (2015). https://doi.org/10.1007/s11071-014-1707-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1707-4