
Abstract
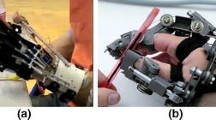
The present article shows the implementation of a bilateral control scheme as an option to be implemented on a hand orthosis. The reference signal is computed using a measurement of the position of the phalanx based on a flexible sensor, the measurements are used to estimate positions of a 3DoF robot based on a polynomial approximation. The estimated positions are used to compute the inverse kinematic to provide positions of the orthosis, this is verified using the Matlab Robotic Toolbox that verifies how the robot reaches the same position of the phalanx.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Bos, R.A., et al.: A structured overview of trends and technologies used in dynamic hand orthoses. J. Neuroeng. Rehabil. 13(1), 1–25 (2016)
Portnoy, S., et al.: Automated 3D-printed finger orthosis versus manual orthosis preparation by occupational therapy students: preparation time, product weight, and user satisfaction. J. Hand Ther. 33(2), 174–179 (2020)
Hernández-Melgarejo, G., Castañeda, L.A., Luviano-Juárez, A., Chairez, I.: Bilateral output-based control of a Master-Slave mechanical system: an active disturbance rejection approach. In: 2016 American Control Conference (ACC). pp. 5284–5289. IEEE, Italy (2016)
Zhu, M., Sun, Z., Zhang, Z., Shi, Q., He, T., Liu, H., Lee, C.: Haptic-feedback smart glove as a creative human-machine interface (HMI) for virtual/augmented reality applications. Sci. Adv. 6(19) (2020)
Repullo Menéndez, M.: Desarrollo de un guante háptico con realimentación táctil. Bachelor Thesis. Escuela Técnica Superior de Ingenieros Industriales (UPM), Spain (2021)
Wang, Z., Qiu, Y., Zheng, X., Hao, Z., Liu, C.: Biomechanical models of the hand-arm system to predict the hand grip** forces and transmitted vibration. Int. J. Ind. Ergon. 88, 103258 (2022)
Nagatsu, Y., Hashimoto, H.: Bilateral control by transmitting force information with application to time-delay systems and human motion reproduction. IEEJ J. Ind. Appl. 10(2), 165–177 (2021)
Spong, M.W., Hutchinson, S., Vidyasagar, M.: Robot Modeling and Control. John Wiley & Sons (2020)
Ljung, L., Andersson, C., Tiels, K., Schon, T.B.: Deep learning and system identification. IFAC-PapersOnLine 53(2), 1175–1181 (2020)
Sira-Ramírez, H., Luviano-Juárez, A., Ramírez-Neria, M., Zurita-Bustamante, E.W.: Active Disturbance Rejection Control of Dynamic Systems: A Flatness Based Approach. Butterworth-Heinemann (2017)
Hmidet, A., Hasnaoui, O.: Waijung blockset-STM32F4 environment for real time induction motor speed control. In: 2018 IEEE 5th International Congress on Information Science and Technology (CiSt), pp. 600–605. IEEE (2018)
Acknowledgments
This research was funded by Secretaría de Investigación y Posgrado IPN under Grant Numbers 20231585, 20232388, 20231157, 20230472.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
De Luna-García, Á.I., Cortez, R., Sandoval-Chileño, M., Lozada-Castillo, N., Luviano-Juárez, A. (2024). Experimental Test Bed for Hand Orthotic Actuators Characterization. In: Flores Cuautle, J.d.J.A., et al. XLVI Mexican Conference on Biomedical Engineering. CNIB 2023. IFMBE Proceedings, vol 97. Springer, Cham. https://doi.org/10.1007/978-3-031-46936-7_9
Download citation
DOI: https://doi.org/10.1007/978-3-031-46936-7_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-46935-0
Online ISBN: 978-3-031-46936-7
eBook Packages: EngineeringEngineering (R0)