
Abstract
This paper provides a class of upper and lower solution definitions for second-order coupled systems by transforming the fourth-order differential equation into a second-order differential system. Then, by constructing a homotopy parameter and utilizing the maximum principle, we propose an upper and lower solutions method for studying a class of second-order coupled systems with Dirichlet boundary conditions and obtain an existence result.
Similar content being viewed by others

1 Introduction
In 1893, Picard [1] introduced the theory of lower and upper solutions to demonstrate the existence of solutions for scalar ordinary differential equations. In 1937, Nagumo [2] proposed a classical upper and lower solutions theory for general differential equation
The methodology of upper and lower solutions has found extensive applications in the analysis of boundary value problems associated with nonlinear differential equations [3–9]. In addition, some scholars have also focused on how to apply upper and lower solution methods to solve coupled differential systems [10–13], but currently, there are few achievements in this type of research.
In 2016, by applying the upper and lower solutions method combined with Schauder’s fixed point theorem, Talib, Asif, and Tunc [11] studied the coupled second-order system
where \(\psi,\varphi \in C([0,1]\times \mathbb{R},\mathbb{R})\), \(f \in C({{\mathbb{R}}^{6}},{{\mathbb{R}}^{2}})\), and \(g \in C({{\mathbb{R}}^{2}},{{\mathbb{R}}^{2}})\). The equations in system (1) are explicit functions of \({{y}_{1}}\) and \({{y}_{2}}\), respectively.
Recently, Fonda et al. extended the method of upper and lower solutions to the planar system
In [12], they studied the existence of a solution to the periodic problem for system (2). And in [13], system (2) with separated boundary conditions was studied for the existence of a solution. However, their works are only studied in the first-order planar differential systems.
As is well known, the elastic beam equation can be described by the following fourth-order differential equation:
where \(\phi (0)=0\), \(\phi:{{K}_{1}}\to {{K}_{2}}\) is an increasing homeomorphism between two intervals \({{K}_{1}}\) and \({{K}_{2}}\) containing 0. The upper solution Ā and the lower solution \(\underline{B}\) of (3) satisfy
We observed that (3) is equivalent to the following differential system:
which is a special case of a second-order coupled differential system, where \(\tilde{\varphi }(t,{{y}_{1}},{{y}_{2}})=\varphi (t,{{y}_{1}},{{\phi }^{-1}}({{y}_{2}}))\). Consider the upper solution Ā and the lower solution \(\underline{B}\) whose second derivatives take their values in the domain of ϕ. By defining functions \({{y}_{2}}_{{\bar{A}}}(t)=\phi ({\bar{A}}''(t))\) and \({{y}_{2}}_{{\underline{B}}}(t)=\phi ({\underline{B}}''(t))\), the inequalities regarding upper and lower solutions can be transformed into
Therefore, inspired by the work above, in this article we propose a method of upper and lower solutions to study the existence of solutions for second-order coupled system
where \(\psi, \varphi \in C([a,b]\times {{\mathbb{R}}^{2}},\mathbb{R})\). Here, using the conversion of (3) as a guide, we give two crucial definitions for problem \((P)\).
Definition 1
If there exist a function \(\underline{B} \in {{C}^{2}} [ a,b ]\) and a function \({{v}_{\underline{B} }}\in {{C}^{2}} [ a,b ]\) such that
and
then we say \(\underline{B}\) is a lower solution for problem \((P)\).
Definition 2
If there exist a function \(\bar{A} \in {{C}^{2}} [ a,b ]\) and a function \({{v}_{\bar{A} }}\in {{C}^{2}} [ a,b ]\) such that
and
then we say Ā is an upper solution for problem \((P)\).
If \({{y}_{1}}\) is both the upper and lower solution of problem \((P)\), then \(({{y}_{1}},{{y}_{2}})\) satisfies \((P)\).
The structure of this paper is as follows. In Sect. 2, by constructing a homotopy parameter and using the maximum principle, we apply the upper and lower solutions method to obtain the existence of a solution for problem \((P)\). In Sect. 3, we provide two examples.
2 Existence result
We are committed to establishing the existence of a solution for the coupled second-order problem \((P)\) in this section.
Theorem 1
Suppose that there are \(\bar{A} \in {{C}^{2}} [ a,b ]\) and \(\underline{B} \in {{C}^{2}} [ a,b ]\), which are the upper and lower solutions of problem \((P)\), respectively, with \(\underline{B} \le \bar{A} \), \({{{{y}_{2}}}_{\bar{A} }}\le {{{{y}_{2}}}_{\underline{B} }}\) if \(g, f\in C([a,b]\times {{\mathbb{R}}^{2}},\mathbb{R})\) satisfy the following assumptions:

then problem \((P)\) admits a solution \(({{y}_{1}},{{y}_{2}})\) that satisfies
Proof
First, we construct a truncation function as follows:
Define
and
then we consider the problem as
If \((\bar{P})\) has a solution that satisfies (8), then the solution of \((\bar{P})\) is also the solution of \((P)\). Next we deduce the existence of a solution for \((\bar{P})\) and prove that this solution satisfies (8). The following proof is divided into two steps.
Step 1: Prove that there is a solution to problem \((\bar{P})\).
Using \(\lambda \in [ 0,1 ]\) as the homotopy parameter, we construct the problem
Notice that problem \(({{P}_{1}})\) is a linear problem with only one trivial solution for \(\lambda =1\), and \(({{P}_{0}})\) is \(({\bar{P}})\) for \(\lambda =0\).
We claim that there exists \(R>0\) such that for any \(\lambda \in [0,1]\), \({{ \Vert w \Vert }_{\infty }}< R\), where \(w=({y}_{1},{y}_{2})\) is the solution of problem \(( {{{P}}_{\lambda }} )\) and \({{ \Vert w \Vert }_{\infty }}=\max \sqrt{{{{y}_{1}}^{2}}(t)+{{{y}_{2}}^{2}}(t)}\), \(t\in [a,b]\).
Rewrite problem \(( {{P}_{\lambda}} )\) as
By contradiction, we suppose \(\mathop{\lim }_{n\to \infty } {{ \Vert {{w}_{n}} \Vert }_{\infty }}=+\infty \), where \({{w}_{n}}= ( {{{y}_{1}}_{n}},{{{y}_{2}}_{n}} )\) is the solution of problem \(({{P}_{{{\lambda }_{n}}}})\). Let \({{z}_{n}}= \frac{{{w}_{n}}}{{{ \Vert {{w}_{n}} \Vert }_{\infty }}}\), then \({{z}_{n}}= ( {{p}_{n}},{{q}_{n}} )\) solves the following problem:
Since \({{z}_{n}} \in {{C}^{2}} ( [ a,b ],{{\mathbb{R}}^{2}} )\), we deduce \({{ \Vert {{z}_{n}} \Vert }_{\infty }}=1\) and \({{ \Vert {{{{z}'}}_{n}} \Vert }_{\infty }}\) is bounded. We have that \(\tilde{z}= ( \tilde{p},\tilde{q} )\) with \({{ \Vert {\tilde{z}} \Vert }_{\infty }}=1\) and \(\tilde{\lambda }\in [ 0,1 ]\) by a compactness argument, such that the following subsequence converges:
where \(\tilde{z}\in {{C}^{2}} ( [ a,b ],{{\mathbb{R}}^{2}} )\).
By the limit as \(n\to \infty \), we get that \(\tilde{z}= ( \tilde{p},\tilde{q} )\) is a solution of the system
Since this problem only has a trivial solution, which contradicts \({{ \Vert {\tilde{z}} \Vert }_{\infty }}=1\), there is an \(R>0\) such that for every w of problem \(( {{{P}}_{\lambda }} )\) it satisfies \({{ \Vert w \Vert }_{\infty }}< R\).
Define the linear operator \(L:{{C}^{2}} ( [ a,b ],{{\mathbb{R}}^{2}} ) \to {C} ( [ a,b ],{{\mathbb{R}}^{2}} )\),
and the nonlinear operator \({{N}_{\lambda }}:{{C}^{2}} ( [ a,b ],{{\mathbb{R}}^{2}} )\to {{C}^{2}} ( [ a,b ],{{\mathbb{R}}^{2}} )\),
Therefore, problem \(( {{P}_{\lambda }} )\) is rewritten as
where \(w=({y}_{1},{y}_{2})\). The operator \({{N}_{\lambda }}\) is L-completely continuous by coincidence degree theory [14], and the degree \({{D}_{L}} ( L-{{N}_{\lambda }},{{B}_{R}} )\) is well defined and its value is independent of \(\lambda \in [ 0,1 ]\).
Since \(( {{P}_{1}} )\) is a linear problem with only one trivial solution,
Therefore problem \((\bar{P})\) has a solution.
Step 2: Prove that the solution of problem \((\bar{P})\) satisfies (8).
To argue with contradictions, for \(a\le {{a}_{1}}\le {{b}_{1}}\le b\), we assume that \({y}_{2}(t)>{{{y}_{2}}_{\underline{B} }}(t)\) for every \(t\in ({{a}_{1}},{{b}_{1}})\) and \({y}_{2}(t)\le {{{y}_{2}}_{\underline{B} }}(t)\) for every \(t\in { [ a,b ]}/{ ( {{a}_{1}},{{b}_{1}} )} \).
For every \(t\in [ a,b ]\), define \(H(t)={y}_{2}(t)-{{{y}_{2}}_{\underline{B} }}(t)\). It follows that
Furthermore, by \(({{A}_{2}})\) and \(({{A}_{3}})\), one has

Hence, for every \(t\in [ a,b ]\), \({H}''(t)\ge 0\). It follows from the convexity of \(H(t)\) and (5) that \({y}_{2}(t)\le {{{y}_{2}}_{\underline{B} }}(t)\) for every \(t\in [ a,b ]\), which contradicts our assumption. Similarly, for every \(t\in [ a,b ]\), we obtain that \({y}_{2}(t)\ge {{{y}_{2}}_{\bar{A} }}(t)\).
To argue with contradictions, for \(a\le {{a}_{2}}\le {{b}_{2}}\le b\), we assume that \({y}_{1}(t)<\underline{B} (t)\) for every \(t\in ( {{a}_{2}},{{b}_{2}} )\) and \({y}_{1}(t)\ge \underline{B} (t)\) for every \(t\in { [ a,b ]}/{ ( {{a}_{1}},{{b}_{1}} )} \).
For every \(t\in [ a,b ]\), defining \(K(t)={y}_{1}(t)-\underline{B} (t)\). It follows that
Furthermore, by \(({{A}_{1}})\), one has

Hence, for every \(t\in [ a,b ]\), \({K}''(t)\le 0\). It follows from the concavity of \(K(t)\) and (5) that \({y}_{1}(t)\ge \underline{B} (t)\) for every \(t\in [ a,b ]\), which contradicts our assumption. Similarly, for every \(t\in [ a,b ]\), we obtain that \({y}_{1}(t)\le \bar{A} (t)\).
Therefore, the solution of problem \((\bar{P})\) satisfies (8). By combining Step 1 and Step 2, we can obtain problem \((P)\) has a solution that satisfies (8). □
3 Some examples
Example 1
Consider the second-order coupled system
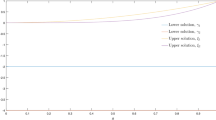
where \(t\in [0,1]\). We find \(\bar{A} (t)=-4{{t}^{2}}+6\) and \(\underline{B} (t)=4{{t}^{2}}-6\) are the upper and lower solutions of (9) respectively, and that \({{v}_{\underline{B} }}(t)=-4{{t}^{2}}+6\) and \({{v}_{\bar{A} }}(t)=4{{t}^{2}}-6\) satisfy Theorem 1.
Since (9) satisfies all the assumptions in Theorem 1, we can get that problem (9) has a solution that satisfies
Example 2
Consider the second-order coupled system
where \(t\in [0,1]\). We find \(\bar{A} (t)=-4{{t}^{2}}+\sin \frac{\pi }{2}t+5\) and \(\underline{B} (t)=4{{t}^{2}}-\sin \frac{\pi }{2}t-5\) are the upper and lower solutions of (10) respectively, and that \({{v}_{\underline{B} }}(t)=-3{{t}^{2}}+t+4\) and \({{v}_{\bar{A} }}(t)=3{{t}^{2}}-t-4\) satisfy Theorem 1.
Since (10) satisfies all the assumptions in Theorem 1, we can get that problem (10) has a solution that satisfies
Data availability
No datasets were generated or analysed during the current study.
Code availability
Not applicable.
References
Picard, É.: Sur l’application des méthodes d’approximations successives à l’étude de certaines équations différentielles ordinaires. J. Math. Pures Appl. 9, 217–271 (1893)
Nagumo, M.: Über die differentialgleichung \({y}''=f(t,y,{y}')\). Proc. Phys. Math. Soc. Jpn. 19, 861–866 (1937)
Bai, Z.B., Chen, Y.Q., Lian, H.R., Sun, S.J.: On the existence of blow up solutions for a class of fractional differential equations. Fract. Calc. Appl. Anal. 17, 1175–1187 (2014)
Bai, Z.B., Du, Z.J., Zhang, S.: Iterative method for a class of fourth-order p-Laplacian beam equation. J. Appl. Anal. Comput. 9(4), 1443–1453 (2019)
Bao, G., Xu, X., Song, Y.: Positive solutions for three-point boundary value problems with a non-well-ordered upper and lower solution condition. Appl. Math. Lett. 25, 767–770 (2012)
Chen, C.R., Bohner, M., Jia, B.G.: Method of upper and lower solutions for nonlinear Caputo fractional difference equations and its applications. Fract. Calc. Appl. Anal. 22, 1307–1320 (2019)
Mosa, S.A., Eloe, P.: Upper and lower solution method for boundary value problems at resonance. Electron. J. Qual. Theor. 40, 1–13 (2016)
Ma, R.Y., Zhang, J.H., Fu, S.M.: The method of lower and upper solutions for fourth-order two-point boundary value problems. J. Math. Anal. Appl. 215, 415–422 (1997)
Bai, Z.B., Huang, B.J., Ge, W.G.: The iterative solutions for some fourth-order p-Laplace equation boundary value problems. Appl. Math. Lett. 19, 8–14 (2006)
Wang, G.T., Agarwal, R.P., Cabada, A.: Existence results and the monotone iterative technique for systems of nonlinear fractional differential equations. Appl. Math. Lett. 25, 1019–1024 (2012)
Talib, I., Asif, N.A., Tunc, C.: Coupled lower and upper solution approach for the existence of solutions of nonlinear coupled system with nonlinear coupled boundary conditions. Proyecciones 35, 99–117 (2016)
Fonda, A., Klun, G., Sfecci, A.: Well-ordered and non-well-ordered lower and upper solutions for periodic planar systems. Adv. Nonlinear Stud. 21(2), 397–419 (2021)
Fonda, A., Sfecci, A., Toader, R.: Two-point boundary value problems for planar systems: a lower and upper solutions approach. J. Differ. Equ. 308, 507–544 (2022)
Mawhin, J.: Topological degree methods in nonlinear boundary value problems. Am. Math. Soc. (1979)
Funding
This work was funded by the National Natural Science Foundation of China (12371173), the Shandong Natural Science Foundation of China (ZR2021MA064), the Shandong Province Natural Science Foundation (ZR2023QA025) and the Taishan Scholar project of China.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this work. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yu, Z., Bai, Z. & Shang, S. Upper and lower solutions method for a class of second-order coupled systems. Bound Value Probl 2024, 30 (2024). https://doi.org/10.1186/s13661-024-01837-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-024-01837-3