
Abstract
Rwanda's power system security is the most important in optimization of grid frequency to prevent power blackouts caused by load disturbances and power imbalances. To manually stabilize and restore network frequency, a tuned PID (Proportional, Integral, and Derivative) controller was used, but it was inefficient and unreliable. The objective of this article is to develop a system that can be used to balance generation—demand powers during power outages by alleviating grid frequency in load disturbance cascaded events. By balancing power generation and demand, the balanced steady-state approach was proposed and developed to restore and optimize grid frequency to its normal state. This technique used PID-Power System Automatic Stabilization (PID-PSAS) technique based on load frequency control. The load disturbances of ± 20%, ± 10%, and ± 5% of a 250 MW power load were considered. MATLAB/Simulink was utilized to model and simulate the Rwanda power and controller systems. The results showed that the frequency responses of single and two area western and northern grids were reduced to \({13*10}^{-5}\) Hz, \({15*10}^{-6}\) Hz, and 0.251 s for overshoot, steady-state error, and settling time respectively. The proposed control system performance of 99.86% success rate was achieved and compared with the current control techniques of 70.6% performance rate. A stable frequency was observed at any disturbances and more than 300 megawatt losses were mitigated. Finally, the developed control technique rapidly stabilize the frequency and balance the generation-demand powers after 0.251 s. Future works have to focus on 0 Hz of steady state errors using cyber-physical power optimization systems.
Article Highlights
-
1.
The steadiness of connected loads and power utility supply
-
2.
Reduction of frequency instability and stead-state values
-
3.
Prevention and mitigation of power blackouts and power interruptions
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The increased demand and de-regulation of electric power system predicts a lot of energy utility stress, which leads to a slew of power system operation and control issues [1]. The ability of electrical engineers to provide uninterrupted and dependable service in the face of cascading outages is critical to the performance of Rwanda's power system security where power load should be fed at a constant frequency. The voltage and frequency should be maintained and secured within tolerable limits in power system operation to prevent a 10 to 15% voltage drop that can cause load interruptions and affect network frequency [2] Load frequency control systems are implied by governing the active power output to generate units that respond to interruptions in system frequency and load power interchanges inside the recommended ranges. Even though the power systems are large and diverse, they can be influenced by a variety of unexpected events, making power system optimization issues difficult to solve power blackout problems [3]. In the current blackout intelligence, the protection schemes plays a role in numerous modern power failures using PID-PSAS methodology that might be intelligent to provide power system defense [4]. Among the most significant power security, optimization can be used to assist energy consumers to automatically operate the system and minimize system losses, reduce peak load consumption, or minimize control adjustment. This power system optimization strategy can be set to minimize steady state frequency error, settling time, and overshoot by optimize power system operation, and maximize system security which is a technique to balance the power demand and generation for reliability and safety [5]. The cascade interruptions that erupted in Rwanda's power system between 2018 and mid-2021 were primarily severe and very consequential. According to reports, blackouts affected over 5 million residents in five districts in the northern region and seven districts in the western region, and 50 megawatts of load were lost, accounting for nearly 20% of total load. Other cascade incidents started when a major transmission line connecting the Western and Northern grids was interrupted by lightning and overloading [6]. The grid frequency enhancement and optimization offer a secure state of the power protection system with various power loads [7]. In [8], power system automation stabilizers (PSAS) are widely utilized in the power system industry where optimized and enhanced design techniques are offered to provide a reliable control mechanism. And from the power system protection strategy, the large load disturbance rejection capacity can be achieved [9]. The optimization action is taken as a power system frequency regulating parameter which is fulfilled by PID-PSAS control technique. The frequency instability management is achieved by balancing of power demand- generation when restoring power system frequency in milliseconds [10]. The PID-PSAS control system is more effective in enhancing and optimizing the grid frequency in power system stability analysis and dam** under small and big disturbances in comparison to current control system to save more than 300 Megawatts losses [11]. The analysis of power system markets demonstrated that optimizing the power system protection (PSP) is very important subject in research and different researchers studied this problems with different types of controllers and power models. All the control strategies presented in the literature review of power system protection study showed merits and demerits. The application of optimal control theory showed that PID-PSAS controller can dynamically improve the power system stability. To prove the PID-PSAS controller performance in wider range variation in hydropower plant generation parameters and load disturbance condition is the most key factor of motivation in this article. This research is organized into four major sections. Firstly, it gives the overall introduction of power blackout problems and causes in Rwanda including the motivation and novelty of the proposed PID-PSAS control system. Secondly, the past achievements in power blackout mitigation where the load frequency control, generator-demand power balance are briefly reviewed and presented. It also identifies the past research gaps and proposes a novel solution to the challenges. Thirdly, the materials and methodology were addressed to solve the power blackouts problem where the PID-PSAS controller and single area and two area hydropower generation models with their control techniques in the case study are studied and developed. Fourthly, the research article also proposes the solution and discusses the frequency response characteristics such as overshoot, steady-state frequency error, and settling time. The proposed and developed controller method is compared with the current controller method by simulation in both control areas. Finally, the general conclusion and future works are documented.
2 Review of related works
Wide-area monitoring (WAM) system based on phasor measurement units (PMU) was proposed. The aim of this method was to improve the efficiency of power system protection and to provide real-time monitoring and observation of the grid's dynamic behavior that updates once per cycle because this control technique has increased the variable operating conditions of the power network. In addition, this technique makes the system more difficult to select relay characteristics [12]. In [13], the Linear Matrix Inequality (LMI) predicated on the PID method was suggested to optimize and enhance the power system frequency. This method uses PID control combined with LMI system to stabilize the power generation and demand during power outages but the system raised the drawbacks for high steady-state frequency error, settling time, overshoot, and dynamic response. Gerard et al. [14] proposed a power plant performance and power system protection systems based on PID controller but during the incident, generating units were started up and island formed around some of generating stations by connecting essential loads through 30 kV lines but at the time of connecting 110 kV, electric line machines tripped with different alarms like loss of excitation and over speed. The current control technique proves the insensitivity, inefficiency, and ineffective in the power stations where the machine was started but tripped immediately at first attempts of connecting load (before forming island). This behavior was attributed either to excessive reactive power from the grid, improper setting of governor and excitation, malfunction of governor, control and excitation system resulting in hunting, and poor excitation. The objective of this study is to balance the power generation and demand during load disturbance by stabilizing the system frequency, minimize the overshoot together with steady-state frequency error, and optimize the settling time. The PSAS-PID control technique also presented an enhanced and optimized system to the power protection system, reduction of reactive power, enhancement of the governor operation and providing proper excitation by reducing transmission circuit loss with mitigation of grid frequency instability.
3 Materials and methods
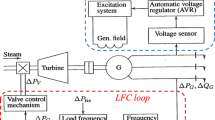
The existing PID control and the proposed PID-PSAS techniques for frequency load control have been considered in this article. The parameters and setting values for single and two area generation of hydroelectric power stations such as the rated power load of 250 MW, load disturbances of ± 20%, ± 10%, and ± 5% of rated power load, Time constants for turbines, governors, and power systems with governor speed regulation have been considered and employed in NTARUKA and NYABARONGO hydroelectric power stations. Gikondo National Network monitoring and dispatching stations controlled the Northern and Western grids from the above-mentioned power generation stations. During the operation of control system, the Northern energy grid was monitored to check whether there were any cascade power blackouts or altering conditions. Using the PID-PSAS controller, the frequency load system was computed to assess the power system protection's state. To ensure the power system's reliability and stability, the control algorithms monitored frequency deviations, power generation-demand imbalances, and load changes. The monitoring system has remained operational since the system was declared to be secure (i.e. not vulnerable). Aside from that, the parts and situations that are vulnerable have been recognized. As a result of the potential for imbalanced frequency and overload problems in certain sensitive settings, appropriate and matching control measures were forecasted and given to mitigate and prevent power blackouts, which were detected and activated as needed. MATLAB 2019a/Simulink software has been utilized to create and compute the power generation models and simulations in the case study. Figure 1 illustrates the flowchart of power cascade outages detection and load-supply power imbalance control system by monitoring the power system to the provided frequency control mechanism. Figure 2 depicts the current single area power system using load frequency control based on proportional, integral, and derivative (PID) controller where the output of the generator was sensed by frequency sensor and sent to the comparator by load reference comparison. The PID takes this signal error to the governor to communicate with the turbine to increase or decrease the speed of the machine according to the load demand.

Flowchart of detection for cascade outages minimization in power balance steady system

Single area power generation existed PID control scheme in Rwanda
Figure 3 shows the two-area power system control system based on the existing PID control system. This current technique provided the control mechanism that acts as long as load disturbances occurred. The output from Generator 1 and Generator 2 is frequency changes of area 1 and area 2. These frequency changes were integrated and synchronized by applying synchronization parameter, then sent to comparators 1 and 2 using frequency sensor 1 and 2 for load referencing signal comparison and checking purpose. The signal output from comparators was taken by PID controllers of Area 1 and Area 2. The power capacity signal from the controllers commands the governor to allow high or low speed of turbines in opening the valve at a wider or narrow diameter.

Existing Two-area power system PID controllers in Rwanda
The PID-PSAS circuit controllers have been modeled and used in the single and two-area power systems to provide necessary dam** torque to the system to prevent oscillations caused by a variety of perturbations that occurred frequently and maintain the system's stability as described in the two case studies. Figure 4 shows the mathematical model of power system automatic stabilization control circuit that has a washout filter as a high pass filter with zero static gain that rejects steady-state inputs while passing transient faults. This filter also has a lag-lead compensator to improve undesirable frequency response in feedback and a control system. It was created as a subsystem using MATLAB/Simulink. The output of two area power generators was taken by frequency-power measurement to provide the R-L load and power–frequency measurement to restore stability. Figure 5 shows the frequency to power measurement (Hz-MW) module where a frequency signal was integrated with a parameter to get power outputs and Fig. 6 shows the MW-Hz measurement circuital module from power to frequency process which was used in the experimental testing in the case studies.

Power System Automation and Stabilization Control Circuit

Frequency-Power Measurement Module

Power–Frequency Measurement Module
The resistive–inductive load (R-L load) has been modeled and considered as sudden load change. Figure 7 indicates the R-L load that was connected in two areas of power generation. The value of inductance (L) and Resistance (R) considered is 75Henry and 25Ohms respectively.

Sudden R-L Load Applied to two interconnected generations
MATLAB/Simulink 2019a was used to model and compute the single and two area power generations described in the case studies with the proposed PID-PSAS control technique. Figure 8 demonstrates the proposed power generation control system using the PID-PSAS technique where the frequency sensor detected the frequency of the generator output. The frequency change was measured by a change in rotor angle, and the load frequency controller amplified and transformed the frequency change error signal into a real frequency command signal, which was then compared to the reference signal and sent to the prime mover via the governor, which controls the turbine's valve mechanism. The prime mover balanced the output of the governor which compensates the value of the error signal for torque increment and decrement (frequency change). The process continues until frequency deviation reaches a specified tolerance in the system. The zero state frequency deviation was achieved by resetting the PID-PSAS controller to act on the load reference setting to change the speed set-point. The PSAS circuit was installed to add dam** to the rotor oscillation of the generator by excitation control in disturbance occurrences.

Proposed Single area generation PID-PSAS control Technique
Figure 9 illustrates the two areas interconnected power system with the proposed PID-PSAS control technique where the load frequency loop regulates the real power and frequency of the generator power output. The frequency error signal was sensed by frequency sensor for area 1 and area 2 and controls turbine power input operation using speed governor the generator output and maintains proper power interchange with the interconnections. This loop is slower in response and is insensitive to rapid load and frequency changes. The Power System Automation Stabilizer (PSAS) was considered as a feedback controller for a synchronous generator that provides an additional stabilizing signal to PID through load reference input to damp out low-frequency oscillations. The PSAS circuit has been installed in area 1 and area 2 to produce an electrical torque mechanism that should be in phase with rotor speed deviation of generator 1 and generator 2 to control the excitation generator system. The frequency change output signals of area 1 and area 2 were sent to a frequency-power measurement computed module to get the power change signal. The R-L load was added to any sudden load disturbance with extreme perturbation of 75megawatts to test the performance of the proposed controller and the power output signal was power – frequency measurement module to obtain the frequency error signal which was sent to the comparator of the synchronizing system and the power system comparators for load reference consideration. The control process repeats until the minimum steady-state error is achieved.

Proposed two area generations PID PSAS control Technique
In disturbance conditions, the load increment and decrement per unit have been considered. The ± 20%, ± 10%, and ± 5% of 250 MW of active power load were considered and employed in both area power generations for the load disturbance test system. As indicated in methods. Table 1 shows the estimated and considered load disturbances that were used in both single and two area power generations. Table 2 depicts the parameters and setting values of single and two area power generations that were chosen and employed into power generation systems as illustrated in the case.
4 Results and discussion
4.1 Case study 1: single area power generation
In this article, an active power load of 250 MW was taken as Rwanda generation capacity. The single area power generation non-reheat parameters as described in Table 1, the step load increment and decrement on the demand side of ± 20%, ± 10%, and ± 5% of the total active power load as tabulated in Table 2, were considered. The performance of the tested system was conducted using proposed PID-PSAS control system. The frequency response characteristics for overshoot, steady-state frequency errors, and settling time were observed. Figure 10 illustrates the simulation results of developed PID-PSAS frequency performance and the existing PID control system for (a) proposed control system with load disturbance by increment conditions, (b) proposed control system with load disturbance by decrement conditions, (c) existing control system with load disturbance by increment conditions, and (d) existing control system with load disturbances by decrement conditions in single control area.

Proposed PID-PSAS frequency response with a Load disturbance increment b Load disturbance decrement and existing PID frequency response with c Load disturbance increment and d Load disturbance decrement in single area power generation
The summarized frequency responses of the simulation tests conducted in this research were discussed and compared to the related recent research outputs as described in [14,15,16,17], and [18]. The observed results showed the sensitivity of the developed control system by 99.86% of sensitivity rate and defend the greater difference and high performance of 95.77% success rate than the recent frequency control strategies to mitigate power blackouts in Rwanda power network. The generation-demand powers were balanced and the frequency was stabilized and restored to 50 Hz by using the PID-PSAS control technique in single area power generation after 300 MW, 275 MW, 262.5 MW, 237.5 MW, 225 MW, and 200 MW load disturbances. Table 3 illustrates the smallest frequency characteristics of 0.000015 Hz, 0.0000012 Hz, and 0.251 s; 0.13 Hz, 0 Hz, and 0.251 s for overshoot, frequency steady-state error, and settling time were successfully observed and saved the 75 Megawatts loss respectively by weighing with the related research findings. Table 4 indicates the comparative performance of Rwanda power protection control system using the current PID control system with the developed PID-PSAS control technique proposed in this research. As indicated, the proposed enhancement system proves the efficiency and effective operation with high enactment to stabilize and balance the frequency. The 0 Hz for steady state error, 0 Hz of overshoot and 0 s of settling time were observed before load disturbance occurrence and it showed the effectiveness of the developed control system. The minimum overshoot, frequency error, and settling time were also observed after disturbances and it demonstrates how this proposed PID-PSAS control system is very powerful and efficient than the existing control system to adapt in bigger load perturbation occurrences.
4.2 Case study 2: tow-area power generation
The frequency load characteristics with the existing PID controller in Rwanda's two area power generations by load disturbance increment and decrement conditions were simulated and computed. The tested system with the use of the developed PID-PSAS control technique was also computed for frequency load perturbation characteristics. The overshoot, steady-state frequency errors, and settling times in load disturbance increment and decrement conditions were observed. The two area power generations were synchronized by applying the synchronization parameter. The results demonstrate that the frequency overshoot reached at 0.2Hz while the frequency error reached at 0.8Hz. The system took 16 seconds to restore the network frequency which caused around 15.85megawatts loss in the northern power interconnected grid. Therefore, the developed control system was applied, and the 0Hz for overshoot was ascertained, and the frequency error also reached at 0.006 Hz. The system frequency was restored within 0.251 seconds. The developed method demonstrates 99.89% of performance better than the existing control technologies. Figure11 shows the simulation results of frequency load characteristics in Rwanda using an existing PID controller and the proposed PID-PSAS control technique under load disturbance increment and decrement conditions in two control area systems.

Frequency responses with a existing PID control scheme Load disturbance increment b existing PID control scheme Load disturbance decrement c Proposed PID-PSAS control scheme with load disturbances increment d Proposed PID-PSAS control scheme with load disturbances decrement in two area power generations
The power imbalances caused the frequency to fluctuate up to 0.2 Hz of overshoot and 0.8 Hz of steady-state frequency error during load increment and decrement conditions. The PID-PSAS control system acted and provided a sensitive control mechanism to restore frequency within 0.251 s after power blackouts caused by load disturbances. The Rwanda northern region grid lost 9.97 MW while 12.79 MW were lost in the western region grids which caused energy deficits. The 0 Hz of overshoot and 0.000112 Hz of steady-state errors were also observed which demonstrates the rate of 99.96% performance of the developed control to the current control system. Table 5 illustrates the controllers' performance of the two area power generations with different load disturbance conditions as described in the research.
These results (Table 5) show that by tuning the PID parameters and installing the PID-PSAS control system in two control area power generation; the frequency characteristics at any load disturbance conditions were carefully observed in terms of overshoot, steady-state error, and settling time were minimized to 0 Hz, 0.000015 Hz, and 0.251 s respectively. The grid frequency was restored in 0.251 s to 50 Hz after disturbance occurrences while in the current control system, it takes 17 secs to restore system frequency which caused more 50 Megawatt losses. The performance rate of 99.78% of the developed and proposed control system was achieved and This PID-PSAS control technique become more sensitive and effective by 99.85% than the current PID control system used in Rwanda Northern and Western power generations. Table 6 shows the summarized results of current and developed control systems of two-area power generations for the frequency response characteristics. In addition, the developed PID-PSAS controller caused the reduction in undershoot, frequency errors, and settling time to minimum values respectively at large disturbances bigger than 300 Megawatt of active loads.
5 Conclusion and furute works
This paper offered a frequency-based load control technique for generation-demand powers, as well as frequency stability power network enhancement and optimization in power system blackouts. The proposed PID-PSAS control scheme was developed, investigated, and tested to address and validate the proposed controller convergence. The load disturbance increment and decrement conditions were taken into account in single and two control areas of the two case studies. The computational and simulation studies demonstrated that the proposed PID-PSAS load control technique was able to balance power demand with supply and restore grid frequency at any load disturbances in any conditions. The 99.9925% performance rate for overshoot, 99.9985% performance for steady-state frequency error and 97.047% performance rate for settling time were observed and achieved in single area power generation. The 98.887% success rate for overshoot, 99.986% success rate of steady-state frequency error and 98.431% performance rate for settling time were also observed and achieved in two area power generations. The developed control technology demonstrates higher performance than the current control technique at any random load disturbances. In conclusion, when the power demand exceeds power generation, frequency declines and power generation has to be maintained by increasing turbine power output. The frequency rises when the total demand is less than the total power generation. After that, the power generation must be reduced. The frequency remains constant if the total demand matches the generation, no need to regulate power generation. Further optimization and enhancement techniques like artificial intelligence and cyber-physical power systems (CPPS) are recommended for future work to maintain steadiness at 0% of over and undershoot, steady-state errors, and settling time of frequency characteristics of the power network protection.
Data availability
The article contains all of the necessary information. Upon request, the corresponding author will provide any additional information.
Abbreviations
- Hz:
-
Hertz
- PID:
-
Proportional, Integral, Derivative
- MW:
-
Megawatt
- %:
-
Percentage
- p.u:
-
Per unit
- R :
-
Regulation gain constant coefficient of single area power generation
- Tg :
-
Governor Time constant of single area power generation
- Tt :
-
Turbine time constant of single area power generation
- TP :
-
Power system time constant of single area power generation
- KP :
-
Power system gain constant of single area power generation
- Sp :
-
Synchronization parameter of two-area power generations
- Tg1, Tg2:
-
Governor Time constants of Generator 1 and 2 respectively
- I:
-
Current
- Tt1, Tt2:
-
Time (sec) Constants of Turbine’s generators 1 and 2 respectively.
- TG1, TG2:
-
Time (sec) constants of Power System’s generators 1 and 2 respectively.
- VR:
-
Voltage resistive
- VL:
-
Voltage Inductive
- V:
-
Voltage
- A:
-
Amps
- KG1, KG2:
-
Power System Gain constants of Generators 1 and 2 respectively.
- R1, R2, R3:
-
Regulation and Frequency Sensing parameters.
- DF:
-
Deviation of Frequency per unit
- NF:
-
Normal Frequency in Hertz
- KPSAS :
-
Power system automation stabilization gain
- PSAS :
-
Power system automation stabilizer
- LMI:
-
Linear Matrix Inequality
- MATLAB:
-
Matrix Laboratory
- Kps, Kps1, Kps2:
-
Power system stabilizer gains for a single area, area 1, and area 2 power generations respectively
- K_Hz-MW :
-
Frequency-Power Measurement gain
- K_MW-Hz :
-
Power–Frequency Measurement gain
- R:
-
Resistance in Ohm
- L :
-
Inductance in Henry
- Tw :
-
Constant of Time (sec) of washout filter
- T1 & T2:
-
Constants of Time (sec) of Lead-Lag compensator
- R-L:
-
Resistive-Inductive
References
Modi PK, Singh SP, Sharma JD, Pradhan PK (2006) Stability improvement of power system by decentralized energy. Adv Energy Res Burla 1(7):1–6
Tanwani NK, Memon AP, Adil WA, Ansari JA (2014) Simulation techniques of electrical power system stability studies utilizing Matlab Simulink. Engineer 9:18
Ayalew F, Hussen S et al (2022) Optimization techniques in power systems: a review. Int J Eng Appl Sci Technol 3(10):8–16
Committee TE, (2012) Grid disturbance in northern region. Ministry of Commerce and Industry. New Delhi, India
Behçet K, Üzeyir A (2019) Adaptive relaying in electric power system protection. Online J Sci Technol 9(1):1–4
Weiss R (2020) Line Voltage Stability Indices Based on Precautionary MeasureApproximation in Smart Grid. In: Proceedings of the 11th International Conference on Innovation & Management. Kigali, Rwanda
Remon D, Cantarellas AM, Mauricio JM, Rodriguez P (2017) Power system stability analysis under increasing penetration of photovoltaic power plants with synchronous power controllers. IET Renew Power Gener 11(6):733–741. https://doi.org/10.1049/iet-rpg.2016.0904
Kundur P (1994) Power System Stability and Control. McGraw- Hill, New York
Gurrala G, Sen I (2010) Power system stabilizers design for interconnected power systems. IEEE Trans Power Syst 25(2):1042–1051
Li Y-Y, Gomaa Haroun AH (2022) Ant lion optimized hybrid intelligent PID-based sliding mode controller for frequency regulation of interconnected multi-area power systems. Trans Inst Meas Control 42(9):1594–1617
Pota HR et al (2009) Excitation control for large disturbances in power systems with dynamic loads. IEEE Power Energy Soc Gen Meet Calg. https://doi.org/10.1109/PES.2009.5275909
Phadke AG, Wall P, Ding L, Terzija V (2016) Improving the performance of power system protection using wide area monitoring systems. J Mod Power Syst Clean Energy 4(3):319–331. https://doi.org/10.1007/s40565-016-0211-x
Singha VP, Kishor N, Samuel P (2022) Improved load frequency control of power system using LMI based PID approach. J Franklin Inst 15(354):6805–6830. https://doi.org/10.1016/j.jfranklin.2017.08.031
Gerard PT, Providence J (2021) Power plant performance and power system protection systems. Rwanda Energy Group/ Energy Utility Corporation Limited, Rwanda
Singh VP, Kishor N, Samuel P (2017) Improved load frequency control of power system using LMI based PID approach. J Frankl Inst 354(15):6805–6830
Naga Sai Kalyan CH, Sambasiva Rao G (2020) Frequency and voltage stabilisation in combined load frequency control and automatic voltage regulation of multiarea system with hybrid generation utilities by AC/DC links. Int J Sust Energy 39(10):1009–1029. https://doi.org/10.1080/14786451.2020.1797740
Gupta DK, Bizon N et al (2021) Frequency control using hybrid intelligent optimization technique for multisource power system. Energies/MDPI 14(6):1581. https://doi.org/10.3390/en14061581
Khokhar B, Dahiya S, Singh Parmar KP (2020) A robust cascade controller for load frequency control of a standalone microgrid incorporating electric vehicles. Electric Power Compon Syst 48(6–7):711–726. https://doi.org/10.1080/15325008.2020.1797936
Acknowledgements
The World Bank's Africa Centre of Excellence in Phytochemicals, Textiles, and Renewable Energy (ACE II PTRE), Moi University, is recognized and acknowledged for fully funding this article.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors state that they do not have any conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ntambara, B., Umuhoza, R. Optimization of rwanda power system protection in power blackouts and cascading events. SN Appl. Sci. 4, 296 (2022). https://doi.org/10.1007/s42452-022-05188-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-022-05188-5