
Abstract
Flaws or cracks are one of the major failures in oil and gas pipeline networks. The early detection of these failures is very important for the safety of the industry, and this last requires of analysis for non-destructive testing (NDT), which is reliable, inexpensive and easy to implement. In this paper, we propose the development of an embedded prototype mounted on a mobile robot for the inspection of defects in ferromagnetic plates. This prototype has two embedded systems (control and data acquisition), which are based on a microcontroller of 8 and 32 bits, respectively. On the one hand, the first system for control has the logic to govern the sensors and motors that will allow to the robot moves with autonomous way during 45 min. While, the second system presents an algorithm for storing, processing and sending the data obtained from the sensors, being able to measure variations in the magnetic field in the order of 0.1 µT. Magnetic-field reading tests have been carried out on control ASTM A-27 ferromagnetic plates, obtaining experimental response in the 3 axes of the magnetic domains, which is very close to the expected results by the magnetic-flux density model that is calculated from the fields E and B derived from the equations of a Hertz dipole, and developed in the high-level Python programming language. The prototype proposed for NDT can detect geometric defects in the range of millimeters, producing changes in the density of the magnetic field in the order of thousands of µT.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Detecting damages in structures such as buildings, aircraft, vehicles or pipelines is one of the aspects that have been studied and analyzed in every branch of engineering to avoid breakdowns, malfunctions or deficiencies that could lead to risks of accidents or high unforeseen economic costs [1,2,3]. To prevent this, several approaches are necessary such as visual inspection with highly specialized operators, preventive maintenance, and exclusive techniques for damage detection. For this reason, at present, it is necessary to corroborate the integrity of both public and private structures to ensure their safety. Thus, different experimental techniques have been used to evaluate deformation in structures such as digital holographic interferometry to learn to what extent the beam is deformed at the load and how much it can withstand [4], o the experimental research about mechanical properties of the high-strength steel S960 QL and its welded joints, carried out in fatigue-testing equipment at the laboratory level [5]. An important example occurs in the oil industry, which makes use of pipelines for the supply and transport of hydrocarbons in a liquid or gaseous state, requiring that such pipelines must be in optimal conditions for their use, therefore it is necessary to analyze their structure to detect possible failures or leaks that could endanger both personnel and distribution.
It is important to highlight that the mentioned analysis requires an extensive inspection process and, in some cases, demands for material to be analyzed, which is submitted to certain tests that affect its proper functioning or even cause the total loss of it, this type of analysis is known as destructive testing. Since it is very costly and there are some inconveniences when performing structural analysis by the tests or destructive tests, alternative methods are required, which do not interfere with regular activities, nor affect or damage the element to be analyzed. These methods are known as non-destructive tests, such as the magnetic memory method, eddy currents, and active vision using light scattering.
The optical NDT methods provide higher sensitivity and resolution for high precision applications, however, requires a high cost of implementation and have better penetration on most of dry non-metallic or insolating materials [6].
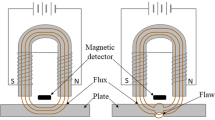
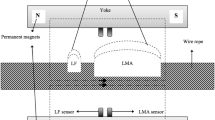
The advantage of the Magnetic Memory Method (MMM) over other non-destructive testing methods that apply magnetism, such as Magnetic Particle Testing, is that MMM does not require the artificial magnetization of the element to be tested [2, 7], but rather makes use of its residual magnetic field for the detection of faults or anomalies. This occurs in structures of a ferromagnetic nature. Another advantage of this method is the capacity not only to detect the superficial anomalies but also the internal ones that the element or structure can have. Magnetoresistive sensors have the ability to detect magnetic field disturbances, which is of great importance for the detection of anomalies in ferromagnetic structures when using the MMM [8, 9]. Such distortion may be a reaction of some defect in the structure, which can be flaws, fractures, hits or dents. The advantages of this method are mainly: (a) the detection of faults in the structure by means of a non-destructive analysis [1, FSM of robot´s behavior path
2.2 Python simulations of the magnetic field in rectangular defect
In order to elucidate the relationship among the profiles of the magnetic field measured by the sensor and geometric characteristics of the flaws, numerical simulations were performed. In the simulations, the system was considered as formed by an ordered arrangement of magnetic moments representing the scenario of a magnetized system incorporating in the structure’s rectangular flaws of different aspect ratios. Hence, the magnetic flux density (strength of the B-field) in Teslas was determined by adding the contributions to the magnetic field of every magnetic moment (representing an average domain) at a given distance from the surface. Every dipolar contribution, being the curl of the vector potential A, reads as follows
where m is the magnetic moment per domain, and r is the vector going from the position of every magnetic moment in the arrangement to the position where B is evaluated. By repeating iteratively this procedure, the cartesian components of B were obtained along the profile at a given distance from the surface. The corresponding experimental counterpart was set up using a pair of permanent neodymium magnets, as shown in Fig. 6, in order to magnetize the domains in the region where the sensor came through. Figure 7 shows the array of random and ordered magnetic domains using Python. The Fig. 8, 9 and 10 shows the behavior of the magnetic field on the plate under test by using the model implemented in software and written in Python programming language and running in a workstation Dell T7910.

Magnetization of the plate to orient the magnetics domain a top view, b side view of the setup using a permanent neodymium magnet

a array of random magnetic domains, b ordered magnetic domains on the plate AST A-27 under test

Magnetic field X of a rectangular defect with ordered magnetic domains

Magnetic field Y of a rectangular defect with ordered magnetic domains

Magnetic field Z of a rectangular defect with ordered magnetic domains
3 Results
In this section, measurements made through the MMM to a rectangular ASTM A-27 steel plate are presented, which has 6 defects that are mechanically induced. The complete system is powered by four 1.5 V batteries (see Fig. 11), which has an autonomy of 45 min and a power consumption of approximately 2 W. Additionally, the microsensor has a resolution of 0.1 µT, and the information obtained from it can be stored in a microSD or sent to the graphical user interface developed in Televiewer through the Bluetooth communication protocol. If the information is stored in the microSD, then it is processed on a PC.

Arrangement implemented for defect measurement on the ferromagnetic board
The mobile robot uses a proportional integral derivative (PID) controller, which was designed to stabilize the speed using an LSM6DS33 3-axis accelerometer, the infrared sensors are used to handle the turning left, right and the moving forward, backward and reverse. Figure 12 shows the structure of the control system for the mobile robot.

Complete system for mobile robot control
As can be observed in Figs. 13, 14 and 15, the maximum peak is -1987 µT, 3957 µT, and 3220 µT, respectively. This model is important, enabling that the experimental profiles are being almost reproduced. This type of comparisons allows to extract geometric characteristics related to the width and depth of the flaws.

Experimental result of magnetic field X of a rectangular defect A1 with ordered magnetic domains

Experimental result of magnetic field Y of a rectangular defect A1 with ordered magnetic domains

Experimental result of magnetic field Z of a rectangular defect A1 with ordered magnetic domains
Figures 16, 17 and 18, the maximum peak is -1949 µT, 3613 µT, and 2681 µT, respectively.

Experimental result of magnetic field X of a rectangular defect B1 with ordered magnetic domains

Experimental result of magnetic field Y of a rectangular defect B1 with ordered magnetic domains

Experimental result of magnetic field Z of a rectangular defect B1 with ordered magnetic domains
Finally, Fig. 19 shows the behavior obtained for flaw C1 where the maximum peak is at -2559 µT for the X axis, Fig. 20 shows for the Y axis a maximum peak from -3304 µT in Fig. 21 shows the Z axis the maximum peak is evident at 2724 µT.

Experimental result of magnetic field X of a rectangular defect C1 with ordered magnetic domains

Experimental result of magnetic field Y of a rectangular defect C1 with ordered magnetic domains

Experimental result of magnetic field Z of a rectangular defect C1 with ordered magnetic domains
4 Discussion
The mobile robot is capable to online defect monitoring on ferromagnetic structures. By using the MMM, no special treatment is required for sampling such as liquid penetrant techniques, emission of Eddy currents, industrial ultrasound, acoustic radiation or the use of destructive techniques. The proposed system reduces the use of expensive equipment and additional operators to monitor rectangular defects in ferromagnetic structures. The dynamic range for robot autonomy can be increased by using a higher value power supply or by modifying the path speed of the mobile robot.
5 Conclusions
In this paper a mobile robot was used to inspect rectangular defects in a ASTM A-27 ferromagnetic plate. The proposed prototype has two embedded systems, one for control and other for data acquisition, which is capable of measuring small variations of the magnetic field due to defects of the order of millimeters at a travel speed of 2.15 cm/s, so the prototype may be suitable for inspection tasks in preventive maintenance in ferromagnetic structures installed in industry settings to avoid serious accidents or environmental damage. The robotic prototype has an autonomy of 45 min, while the microsensor has a resolution of 0.1 µT. The size and depth of the defects measured are related to the shape of the magnetic field measured, the variations present are due to deformations or cracks that are not visible.
The results of the work allow us to appreciate the possible practical applications of the MMM, the ability to analyze defects with a simple device such as the one proposed is an advantage to be taken into account with other inspection methods, at the same time, the possibility of adapting the device to the needs of the structures to be analyzed highlight its potential even more since the design of the device can be modified for its use not only in plates as shown in the results but also in pipes or steel beams. The graphic user interface is easily accessible and user-friendly, where the records obtained from the magnetoresistive microsensor can be monitored. The algorithm implemented in Python programming language is an important model to determine magnetic defects in non-destructive testing, the results shows a high correlation between the flaw simulated and experimental measurements.
Future work will include the study of irregular defects according to the ASTM standard for intergranular or transgranular corrosion and the use of additional microsensors to determine the size and shape of the and FPGA for the embedded systems. Additionally, the universal algorithm implement in [23] for automatic control of movement of mobile wheeled robots using an inertial sensor data, can be integrated into the mobile robot presented in this work in order to record your position in the microSD memory. Specifically, it will be very useful to estimate the plate defects with the position where it occurs, during inspection processes.
