
Abstract
In this article, a hybrid technique called homotopy perturbation Elzaki transform method has been applied to solve Navier–Stokes equation of fractional order. In the hybrid technique, homotopy perturbation method and Elzaki transform method are amalgamated. Three example problems are solved with a purpose to validate and demonstrate the efficacy of the present method. It is also demonstrated that the results obtained from the present method are in excellent agreement with the results by other methods. It is shown that the proposed method is found to be reliable, efficient and easy to implement for various related problems of science and engineering.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Fractional calculus is an important branch of applied mathematics which deals with the differential and integral operators with non-integral powers. Fractional calculus has become popular due to its demonstrated wide range of application in rheology, viscoelasticity, electrochemistry, electromagnetism, fluid mechanics etc. For details, one may see the monographs of Kilbas et al. [1], some fundamental works on various aspects of fractional calculus are given by Kiryakova [2], Lakshmikantham and Vatsala [3], Miller and Ross [4] and the solutions method of differential equations of arbitrary real order and applications of the described methods in various fields are given by Podlubny [5]. In recent years, many analytical and approximate methods for solving fractional differential equations have been developed such as differential transform method [6, 7], finite difference method (FDM) [8], Adomian decomposition method (ADM) [9, 10], homotopy perturbation method (HPM) [11,12,13], Haar wavelet method (HWM) [14, 15], differential transform method (DTM) [16,17,18], variational iteration method (VIM) [19] and many others. Among all the above-listed methods, homotopy perturbation method which was first proposed by the Chinese researcher J.H. He in 1998 plays an important role. This is due to the fact that it addresses a problem directly without the need for any form of transformation, linearization and discrimination. Elzaki Transform (ET) is a new integral transform which was introduced by Tarig ELzaki in 2010. ET is modified transform of Sumudu and Laplace transforms. It is worth mentioning that there are some differential equations with variable coefficients which may not be solved by Sumudu and Laplace transforms but may easily be solved with the aid of ET. Fractional nonlinear differential equations have been solved by various authors [20] by means of the combination of ET and ADM. As regards, Klein-Gordon equations were solved by the authors [21] by amalgamation of ET and iterative method. Further, non-linear partial differential equations are also solved by different authors [22, 23] using modified HPM.
The primary equation of movement of viscous fluid flow known as the NS equation has been presented in 1822 [24]. This equation portrays a few projections which include sea streams, fluid stream in channels, bloodstream and wind current around the wings of an airship. The NS equation was first carried out in 2005 in the fractional form in [25] by El-Shahed and Salem. The classical NS equation was answered by El-Shahed and Salem [25] by means of laplace transform (LT), finite Hankel transforms (FHT) and Fourier sine transform. A nonlinear fractional NS equation was solved analytically by Kumar et al. [26] by the combination of HPM with LT algorithm. Also the same NS equation was resolved by Ragab et al. [27] and Ganji et al. [28] by adopting homotopy analysis method. ADM was adopted by Birajdar [29] and Momani et al. [30] for the solution of fractional NS equation. Sunil Kumar et al. [31] achieved the analytical result of fractional NS equation by means of ADM and LT algorithm while Chaurasia and Kumar [32] solved the similar equation by the pairing of LT with FHT. The present paper gives an exact or approximate solution for the proposed problem by using HPETM.
This article is planned as follows: some basic features of fractional calculus related to the titled problems have been presented in Sect. 2. Elzaki transform and elaborated form of the HPETM have been included in Sects. 3 and 4 respectively. In Sect. 5, three example problems are included to validate the effectiveness and exactness of the proposed method. Lastly, a conclusion is given in Sect. 6.
2 Basic features of fractional calculus
Definition 2.1
The operator \(D^{\alpha }\) of order \(\alpha\) in Abel–Riemann (A–R) sense is defined as [4, 5, 40]
where \(m \in Z^{ + } ,\;\alpha \in R^{ + }\) and
Definition 2.2
The A–R fractional order integration operator \(J^{\alpha }\) is described as [4, 5]
Following Podlubny [5] we may have
Definition 2.3
The operator \(D^{\alpha }\) of order \(\alpha\) in Caputo sense is defined as [5, 33, 39]
Definition 2.4
-
(a)
$$D_{t}^{\alpha } J_{t}^{\alpha } f\left( t \right) = f\left( t \right)$$
-
(b)
$$J_{t}^{\alpha } D_{t}^{\alpha } f\left( t \right) = f\left( t \right) - \sum\limits_{k = 0}^{m} {f^{\left( k \right)} \left( {0^{ + } } \right)} \frac{{t^{k} }}{k!},\;{\text{for}}\;t > 0,\;{\text{and}}\;m - 1 < \alpha \le m,m \in N.$$(7)
3 Elzaki transform (ET)
The definition of modified Sumudu transform or ET of the function \(f\left( t \right)\) is defined as
The Elzaki transform is very effective and powerful method for solving integral equation which cannot be solved by the Sumudu transform method. For this, one may see the Ref. [35].
Integration by parts in Eq. (8) can be used in order to find ET of partial derivatives as follows [35].
-
1.
$$E\left[ {\frac{{\partial f\left( {x,t} \right)}}{\partial t}} \right] = \frac{1}{q}F\left( {x,q} \right) - q\,f\left( {x,0} \right)$$
-
2.
$$E\left[ {\frac{{\partial^{2} f\left( {x,t} \right)}}{{\partial t^{2} }}} \right] = \frac{1}{{q^{2} }}F\left( {x,q} \right) - f\left( {x,0} \right) - q\frac{{\partial f\left( {x,0} \right)}}{\partial t}$$
-
3.
$$E\left[ {\frac{{\partial f\left( {x,t} \right)}}{\partial x}} \right] = \frac{d}{dx}F\left( {x,q} \right)$$
-
4.
$$E\left[ {\frac{{\partial^{2} f\left( {x,t} \right)}}{{\partial x^{2} }}} \right] = \frac{{d^{2} }}{{dx^{2} }}F\left( {x,q} \right).$$
3.1 ET of Caputo fractional derivative
Theorem 1 ([36])
If \(G\left( s \right)\) is the Laplace transform of \(f\left( t \right)\) then ET \(F\left( q \right)\) of \(f\left( t \right)\) is given by
Theorem 2 ([36])
If \(F\left( q \right)\) is the ET of the function \(f\left( t \right)\) then
4 Homotopy perturbation Elzaki transform method (HPETM)
In order to clarify the idea of HPETM, the fractional order nonlinear non-homogeneous partial differential equation with initial condition (IC) is consider as below
where \(D_{t}^{\alpha } f\left( {x,y,z,t} \right)\) is the derivative of \(f\left( {x,y,z,t} \right)\) in Caputo sense, \(R,N\) are the linear and nonlinear differential operators and \(g\left( {x,y,z,t} \right)\) is the source term.
Now by taking ET on both sides of Eq. (11), we have
Using differentiation property of ET, we obtain
Applying inverse Elzaki transform on both sides of Eqs. (14) and (12), we find
where \(G\left( {x,y,z,t} \right)\) represents the term coming from initial condition and source term.
Now, by applying HPM to the Eq. (15), we get
The homotopy parameter \(p\) is used to expand the solution as
and the nonlinear term is decomposed as
where \(H_{n} \left( f \right)\) is He’s polynomials and is given by
Substituting Eqs. (17) and (18) in Eq. (16), we get
Comparing the coefficient of equal powers of \(p\) from both sides of above equation, the following equations are obtained
Continuing in this manner we may find \(f_{n} \left( {x,y,z,t} \right)\) and then the solution is written as
5 Application of HPETM on NS equation
The proposed method is implemented here and then the accuracy of the HPETM is investigated for NS equation. The time fractional NS equation with constant density \(\rho\) and kinematic viscosity \(v = \frac{\eta }{\rho }\) is given as [24, 29]
where \(U = \left( {u,v,w} \right),\,t,\,\rho\) represent the fluid vector, time and pressure respectively. \(\eta\) is the dynamic viscosity while the ratio \(\rho_{0} = \frac{\eta }{\rho }\) represents the kinematics viscosity. Here \(\varOmega = \left( { - \pi ,\pi } \right) \times \left( { - \pi ,\pi } \right)\) is the domain with boundary \(\partial \varOmega\). In Cartesian coordinate, Eq. (21) is written as
If the value of \(p\) is known then all the values of \(g_{1} = - \frac{1}{\rho }\frac{\partial p}{\partial x},\,g_{2} = - \frac{1}{\rho }\frac{\partial p}{\partial y}\) and \(g_{3} = - \frac{1}{\rho }\frac{\partial p}{\partial z}\) can be determined.
5.1 Numerical examples
Example 1
From Eq. (22), 2-dimensional NS equation of fractional order with \(g_{1} = - g_{2} = g\) may be written as
with IC [37]
Applying ET on both sides of Eq. (23) with IC (24), we get
The inverse Elzaki transform of Eqs. (25) and (26) implies that
Simplifying Eqs. (27) and (28), we get
Now applying the homotopy perturbation method, we have
where \(H_{n} \left( u \right)\) and \(H_{n} \left( v \right)\) are He’s polynomials which signifies the nonlinear terms.
where
The first few components of He’s polynomials are given as
Using the above He’s polynomials and comparing the coefficients of same power of \(p\) in Eqs. (31) and (32) we have
So the solution \(u\left( {x,y,t} \right)\) and \(v\left( {x,y,t} \right)\) are written as
For \(g = 0,\,\alpha = 1\) Eqs. (33) and (34) reduce to
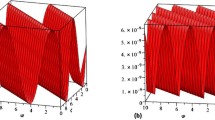
This solution is in good agreement with [37]. The plots of Eq. (35) are depicted in Figs. 1, 2, 3 and 4, for different values of \(\alpha = 1,\,\,0.2,\,\,0.4,\,0.6\), \(\rho_{0} = 0.5\,,t = 3\). The comparison plots of \(U_{0} ,U_{1} ,U_{2} ,U_{3} ,U_{4}\) and \(V_{0} ,V_{1} ,V_{2} ,V_{3} ,V_{4}\) with their exact solution (35) for \(\alpha = 1\) are depicted in Fig. 5 and solution plots of Example 1 are given in Fig. 6 for different values of \(\alpha\).

Solution plots of Eq. (35) for \(\rho_{0} = 0.5,\;t = 3,\;\alpha = 1\) and \(g = 0\)





Example 2
Consider the NS Eq. (23) with IC [37]
Applying ET on both sides of Eq. (23) subject to IC (36), we get
The inverse Elzaki transform of Eqs. (37) and (38) implies that
Simplifying Eqs. (39) and (40), we get
Now applying HPM, we have
where \(H_{n} \left( u \right)\) and \(H_{n} \left( v \right)\) are He’s polynomials that denotes the nonlinear terms and are given as
where
The first few components of He’s polynomials are given by
Using the above He’s polynomials and comparing the coefficients of same power of \(p\) in Eqs. (43) and (44) we have
Then the solution \(u\left( {x,y,t} \right)\) and \(v\left( {x,y,t} \right)\) are given as
For \(g = 0,\,\alpha = 1\) Eqs. (45) and (46) reduce to
This solution is same as the solution solved in [29]. The behavior of the solution (47) are depicted in Figs. 7, 8 and 9 for different values of \(\alpha = 1,\,0.4,0.8\), \(\rho_{0} = 0.5\,,t = 0.05\). The comparison plots of \(U_{0} ,U_{1} ,U_{2} ,U_{3} ,U_{4}\) and \(V_{0} ,V_{1} ,V_{2} ,V_{3} ,V_{4}\) with their exact solution (47) for \(\alpha = 1\) are depicted in Fig. 10 and solution of plots of Example 2 for different values of \(\alpha\) are illustrated in Fig. 11





Example 3
Finally let us consider 3-dimensional NS Eq. (22) with \(g_{1} = g_{2} = g_{3} = 0\) with IC [37]
Applying ET on both sides of Eq. (22) subject to IC (48), we have
The inverse Elzaki transform of Eqs. (49)–(51) implies that
Now applying the homotopy perturbation method we obtain
where \(H_{n} \left( u \right)\), \(H_{n} \left( v \right)\) and \(H_{n} \left( w \right)\) are He’s polynomials that represents the nonlinear terms as
where
The first few components of He’s polynomials are given as
Using the above He’s polynomials and comparing the coefficients of same power of \(p\) in Eqs. (55)–(57) we have
So the solutions \(u\left( {x,y,z,t} \right)\), \(v\left( {x,y,z,t} \right)\) and \(w\left( {x,y,z,t} \right)\) are given as
For \(\,\alpha = 1\) Eqs. (58)–(60) reduce to
This solution is same as solution solved in [38]. The plots of Eq. (61) are depicted in Fig. 12 for \(\alpha = 1,\) \(\rho_{0} = 0.5\,,\,t = 0.1\) and the comparison plots of \(U_{0} ,\,U_{1} ,\,U_{2} ,U_{3}\), \(V_{0} ,\,V_{1} ,\,V_{2} ,V_{3}\) and \(W_{0} ,\,W_{1} ,\,W_{2} ,W_{3}\) with their exact solution (61) for \(\alpha = 1\) are depicted in Fig. 13.


6 Conclusion
In this paper, HPETM is applied for solution of time-fractional NS equations with IC. HPETM provides the solution in term of convergent series. Three example problems are addressed in order to validate and test the efficacy of the proposed method. One may see that the obtained results are in excellent agreement with HPM [28] and ADM [29]. The major benefit of this method over HPM and ADM is that this is a powerful and effective method in finding the analytical and approximate solutions for fractional order nonlinear partial differential equations in place of Adomian’s polynomials.
Change history
12 February 2024
A Correction to this paper has been published: https://doi.org/10.1007/s42452-024-05696-6
References
Kilbas AA, Srivastava HM, Trujillo JJ (2006) Theory and applications of fractional differential equations, vol 204. Elsevier, Amsterdam, 540 pp
Kiryakova V (1994) Generalized fractional calculus and applications. Pitman research notes in mathematics series, vol 301. Longman Scientific & Technical, Harlow
Lakshmikantham V, Vatsala AS (2008) Basic theory of fractional differential equations. Nonlinear Anal 69:2677
Miller KS, Ross B (1993) An introduction to the fractional calculus and differential equations. Wiley, New York
Podlubny I (1999) Fractional differential equation. Academic Press, San Diego
Momani S, Odibat Z, Erturk VS (2007) Generalized differential transform method for solving a space-and time-fractional diffusion–wave equation. Phys Lett A 370:379
Odibat Z, Momani S (2008) A generalized differential transform method for linear partial differential equations of fractional order. Appl Math Lett 21:194
Zhang Y (2009) A finite difference method for fractional partial differential equation. Appl Math Comput 215:524
Wang Q (2006) Numerical solutions for fractional KdV-Burgers equation by Adomian decomposition method. Appl Math Comput 182:1048
Daftardar-Gejji V, Bhalekar S (2008) Solving multi-term linear and non-linear diffusion–wave equations of fractional order by Adomian decomposition method. Appl Math Comput 202:113
Wang Q (2007) Homotopy perturbation method for fractional KdV equation. Appl Math Comput 190:1795
Wang Q (2008) Homotopy perturbation method for fractional KdV-Burgers equation. Chaos Solitons Fractals 35:843
Abdulaziz O, Hashim I, Ismail ES (2009) Approximate analytical solution to fractional modified KdV equations. Math Comput Model 49:136
Rahman MU, Khan RA (2013) Numerical solutions to initial and boundary value problems for linear fractional partial differential equations. Appl Math Model 37:5233
Akinlar MA, Secer A, Bayram M (2014) Numerical solution of fractional Benney equation. Appl Math Inf Sci 8:1633
Secer A, Akinlar MA, Cevikel A (2012) Similarity solutions for multiterm time-fractional diffusion equation. Adv Differ Equ 2012:7
Kurulay M, Bayram M (2010) Approximate analytical solution for the fractional modified KdV by differential transform method. Commun Nonlinear Sci Numer Simulat 15:17
Kurulay M, Akinlar MA, Ibragimov R (2013) Computational solution of a fractional integro-differential equation. Abstr Appl Anal 2013:4
Chamekh M, Elzaki TM (2018) Explicit solution for some generalized fluids in laminar flow with slip boundary conditions. J Math Computer Sci 18:272
Elzaki TM, Chamekh M (2018) Solving nonlinear fractional differential equations using a new decomposition method. Univ J Appl Math Comput 6:27
Alderremy AA, Elzaki TM, Chamekh M (2018) New transform iterative method for solving some Klein-Gordon equations. Results Phys 10:655
Gad-Allah MR, Elzaki TM (2018) Application of new homotopy perturbation method for solving partial differential equations. J Comput Theor Nanosci 15:500
Gad-Allah MR, Elzaki TM (2017) Application of the new homotopy perturbation method (NHPM) for solving non-linear partial differential equations. J Comput Theor Nanosci 14:1
Navier CLMH (1822) Mémoire sur les lois du mouvement des fluides. Mem Acad Sci Inst France 6:389
El-Shahed M, Salem A (2005) On the generalized Navier-Stokes equations. Appl Math Comput 156:287
Kumar D, Singh J, Kumar S (2015) A fractional model of Navier–Stokes equation arising in unsteady flow of a viscous fluid. J Assoc Arab Univ Basic Appl Sci 17:14
Ragab AA, Hemida KM, Mohamed MS, Abd El Salam MA (2012) Solution of time-fractional Navier–Stokes equation by using homotopy analysis method. Gen Math Notes 13:13
Ganji ZZ, Ganji DD, Ganji AD, Rostamian M (2010) Analytical solution of time‐fractional Navier–Stokes equation in polar coordinate by homotopy perturbation method. Numer Methods Part Diff Equ 26:117
Birajdar GA (2014) Numerical solution of time fractional Navier-Stokes equation by discrete Adomian decomposition method. Nonlinear Eng. 3:21
Momani S, Odibat Z (2006) Analytical solution of a time-fractional Navier–Stokes equation by Adomian decomposition method. Appl Math Comput 177:488
Kumar S, Kumar D, Abbasbandy S, Rashidi MM (2014) Analytical solution of fractional Navier–Stokes equation by using modified Laplace decomposition method. Ain Shams Eng J 5:569
Chaurasia VBL, Kumar D (2011) Solution of the time-fractional Navier–Stokes equation. Gen Math Notes 4:49
Caputo M, Mainardi F (1971) Linear models of dissipation in anelastic solids. Rivist Nuovo Cimento 1:161
Carpinteri A, Mainardi F (1997) Wien. Springer, New York
Elzakim TM, Elzaki SM, Hilal EMA (2012) Elzaki and Sumudu transforms for solving some differential equations. Glob J Pure Appl Math 8:167
Elzaki TM, Elzaki SM (2011) On the connections between Laplace and Elzaki transforms. Adv Theor Appl Math 6:1
Singh BK, Kumar P (2016) FRDTM for numerical simulation of multi-dimensional, time-fractional model of Navier–Stokes equation. Ain Shams Eng J. https://doi.org/10.1016/j.asej.2016.04.009
Campos MD, Romao EC (2014) A high-order finite-difference scheme with a linearization technique for solving of three-dimensional Burgers equation. Comput Model Eng Sci 103:139
Morales-Delgado VF, Gomez-Aguilar JF, Kumar S, Taneco-Hernandez MA (2018) Analytical solutions of the Keller-Segel chemotaxis model involving fractional operators without singular kernel. Eur Phys J Plus 133:200
Ghosh U, Banerjee J, Sarkar S, Das S (2018) Fractional Klein–Gordon equation composed of Jumarie fractional derivative and its interpretation by a smoothness parameter. Pramana J Phys 90:74
Acknowledgements
The first author expresses his sincere thanks to Department of Science and Technology, Govt. of India for providing INSPIRE fellowship (IF170207) to undertake the present work.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Rights and permissions
About this article

Cite this article
Jena, R.M., Chakraverty, S. Solving time-fractional Navier–Stokes equations using homotopy perturbation Elzaki transform. SN Appl. Sci. 1, 16 (2019). https://doi.org/10.1007/s42452-018-0016-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-018-0016-9
Keywords
- Elzaki transform
- He’s polynomials
- Homotopy perturbation method
- Caputo time-fractional derivative
- Navier–Stokes equations