
Abstract
Prediction of the fatigue life of steel catenary risers (SCR) in the touchdown zone is a challenging engineering design aspect of these popular elements. It is publically accepted that the gradual trench formation underneath the SCR due to cyclic oscillations may affect the fatigue life of the riser. However, due to the complex nature of the several mechanisms involving three different domains of the riser, seabed soil, and seawater, there is still no strong agreement on the beneficial or detrimental effects of the trench on the riser fatigue. Seabed soil stiffness and trench geometry play crucial roles in the accumulation of fatigue damage in the touchdown zone. There are several studies about the effect of seabed soil stiffness on fatigue. However, recent studies have proven the significance of trench geometry and identified the touchdown point oscillation amplitude as a key factor. In this study, a boundary layer solution was adapted to obtain the dynamic curvature oscillation of the riser in the touchdown zone on different areas of seabed trenches with a range of seabed stiffness. The proposed analytical model was validated against advanced finite element analysis using a commercial software. A range of seabed stiffness was examined, and the corresponding fatigue responses were compared. It was observed that in the elastic seabed, the effect of soil stiffness is attributed to the curvature oscillation amplitude and to the minimum local dynamic curvature that SCR can take in the touchdown zone. The proposed analytical model was found to be a simple and reliable tool for riser configuration studies with trench effects, particularly at the early stages of riser engineering design practice.













Similar content being viewed by others


References
Bridge CD, Howells HA (2007) Observation and modeling of steel catenary riser trenches. In: Proceedings of the 17th international society of offshore and polar engineers conference. ISOPE-I-07-321, Lisbon
Langner C (2003) Fatigue life improvement of steel catenary risers due to self- trenching at the touchdown point. In: Offshore technology conference. OTC-15104-MS, Texas. https://doi.org/10.4043/15104-MS
Wang K, Low YM (2016) Study of seabed trench induced by steel catenary riser and seabed interaction. In: Proceedings of the 35th international conference on ocean, offshore and arctic engineering. OMAE2016-54236, Busan. https://doi.org/10.1115/OMAE2016-54236
Randolph MF, Bhat S, Jain S. Mekha B (2013) Modeling the touchdown zone trench and its impact on SCR fatigue life. In: Proceedings of the offshore technology conference; OTC-23975-MS, Houston. https://doi.org/10.4043/23975-MS
Shiri H (2014) Response of steel catenary risers on hysteretic non-linear seabed. Appl Ocean Res 44:20–28. https://doi.org/10.1016/j.apor.2013.10.006
Shiri H (2014) Influence of seabed trench formation on fatigue performance of steel catenary risers in touchdown zone. Mar Struct 36:1–20. https://doi.org/10.1016/j.marstruc.2013.12.003
Shiri H, Randolph MF (2010) Influence of seabed response on fatigue performance of steel catenary risers in touchdown zone. In: Proceeding of the 29th international conference on ocean, offshore and arctic engineering; OMAE2010-20051, Shanghai
Campbell M (1999) The complexities of fatigue analysis for deepwater risers. In: Proceedings of the deepwater pipeline conference, New Orleans, USA
Aubeny C, Biscontin G (2008) Interaction model for steel compliant riser on soft seabed. In: Offshore technology conference. OTC-19493-MS, Houston
Aubeny C, Biscontin G (2009) Seafloor-riser interaction model. Int J Geomech 9(3):133–141. https://doi.org/10.1061/(ASCE)1532-3641(2009)9:3(133)
Clukey EC, Young AG, Dobias JR, Garmon GR (2008) Soil response and stiffness laboratory measurements of SCR pipe/soil interaction. In: Offshore technology conference; OTC-19303-MS, Houston. https://doi.org/10.4043/19303-MS
Shoghi R, Shiri H (2019) Modelling touchdown point oscillation and its relationship with fatigue response of steel catenary risers. Appl Ocean Res 87:142–154. https://doi.org/10.1016/j.apor.2019.03.010
Shoghi R, Shiri H (2020) Re-assessment of trench effect on fatigue performance of steel catenary risers in the touchdown zone. Appl Ocean Res 94:1–16. https://doi.org/10.1016/j.apor.2019.101989
Aranha JAP, Martins CA, Pesce CP (1997) Analytical approximation for the dynamic bending moment at the touchdown point of a catenary riser. Int J Offshore Polar Eng 7(4):241–249
Pesce CP (1997) Mechanics of cables and tubes in catenary configuration: an analytical and experimental approach. [‘Livre-Docência’ Thesis, in Portuguese]. University of São Paulo
Pesce CP, Aranha JAP, Martins CA (1998) The soil rigidity effect in the touchdown boundary layer of a catenary riser: static problem. In: Proceedings of the 8th international offshore and polar engineering conference. ISOPE-I-98-130, Montreal
Pesce CP, Martins CA, Silveira LM (2006) Riser–soil interaction: local dynamics at TDP and a discussion on the eigenvalue and the VIV problems. J Offshore Mech Arct Eng 128(1):39–55. https://doi.org/10.1115/1.2151205
Randolph MF, Quiggin P (2009) Non-linear hysteretic seabed model for catenary pipeline contact. In: Proceedings of the 28th international conference on ocean, offshore and arctic engineering OMAE 2009-79259. Hawaii, USA
Shoghi R, Pesce CP, Shiri H (2021) Influence of trench geometry on fatigue response of steel catenary risers by using a boundary layer solution on a sloped seabed. Ocean Eng 221:108447. https://doi.org/10.1016/j.oceaneng.2020.108447
Triantafyllou MS, Triantafyllou GS (1991) The paradox of the hanging string an: explanation using singular perturbation. J Sound Vib 148(2):343–351. https://doi.org/10.1016/0022-460X(91)90581-4
Burgess JJ (1992) Bending stiffness in a simulation of undersea cable deployment. Int J Offshore Polar Eng 3(3):197–204
Dhotarad MS, Ganesan N, Rao BVA (1978) Transmission line vibration with 4R dampers. J Sound Vib 60(4):604–606. https://doi.org/10.1016/S0022-460X(78)80101-1
Irvine M (1993) Local bending stresses in cables. Int J Offshore Polar Eng 3(3):172–175
Pesce CP, Pinto MMO (1996) First-order dynamic variation of curvature and tension in catenary risers. In: The 6th international offshore and polar engineering conference. ISOPE-I-96-107, Los Angeles
Pesce CP, Aranha JAP, Martins CA, Ricardo OGS, Silva S (1997) Dynamic curvature in catenary risers at the touch down point: an experimental study and the analytical boundary layer solution. In: Proceedings of the 17th international offshore and polar engineering conference, Honolulu, vol 2, pp 656–665
Love AEH (1927) A treatise on the mathematical theory of elasticity, 4th edn. Dover Publications, New York
Janbazi H, Shiri H (2023) Investigation of trench effect on fatigue response of steel catenary risers using an effective stress analysis. Comput Geotech 160:105506. https://doi.org/10.1016/j.compgeo.2023.105506
Janbazi H, Shiri H (2023) A hybrid model to simulate the trench effect on the fatigue analysis of steel catenary risers in the touchdown zone. Can Geotech J. https://doi.org/10.1139/cgj-2022-0103
Acknowledgements
The authors gratefully acknowledge the financial support of this research by the Research and Development Corporation (RDC) (now Innovate NL) through the Ignite funding program, the “Natural Science and Engineering Research Council of Canada (NSERC)” through Discovery program, and the Memorial University of Newfoundland through VP start-up funding support. The third author acknowledges a research grant from CNPq, the Brazilian National Council for Scientific Research, process 308230/2018-3 and the financial support by CAPES, the Coordination for the Improvement of Higher Education Personnel (CAPES) in Brazil, through the International Exchange Program PRInt-USP/2019.
Author information
Authors and Affiliations
Corresponding author
Additional information
Technical Editor: Celso Kazuyuki Morooka.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix. Dynamic equilibrium equations for the planar problem of a catenary riser
Appendix. Dynamic equilibrium equations for the planar problem of a catenary riser
This Appendix brings a derivation that can be found in a more detailed analysis in Pesce [15], Chapter 4, Section 4.1. It is however essential for the understanding of the local analysis close to TDP, carried out through the boundary layer technique, in the main core of the text. Consider a planar problem of a riser suspended from a floating unity, whose static configuration is characterized by the functions \(\theta \left( s \right)\), \(T\left( s \right)\) and \(Q\left( s \right)\), respectively, the angle of the line with respect to the horizontal, the effective tension and the shear force at a given section s. Let their dynamic counterparts be written as,
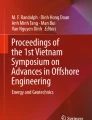
where \(\gamma \left( {s,t} \right)\), \(\tau \left( {s,t} \right)\) and \(\vartheta \left( {s,t} \right)\) are the corresponding perturbed values, resulting from dynamic loads acting on the riser in the vertical plane. Let also \(u\left( {s,t} \right)\) and \(v\left( {s,t} \right)\) be small displacements around the static equilibrium configuration in their tangential and normal directions, respectively. To first order, the following well-known kinematic relation can be promptly derived (Fig. 14).

Schematic view of planar problem
Taking a small segment \(\Delta s\), the resultant of effective tension and shear force projected onto the tangential and normal directions of the static configuration is readily obtained in the form:
If only first-order terms in \(\Delta \theta\) and \(\gamma\) are retained, Eq. (38) reduces to
The dynamic equilibrium equation of the segment \(\Delta s\) then reads
where
refer to the hydrodynamic forces, q is the immersed weight, and m is the mass of the structure, all per unit length. The terms \(h_{u,v} \left( s \right)\) and \(\varpi_{u,v} \left( {s,t} \right)\) are the components of the static and dynamic parcels of the hydrodynamic force in the tangential and normal direction, regarding the static configuration. The last ones are due to the relative external water flow with respect to the riser, at section s, usually modeled through the well-known Morison’s formula. Equations (40) transform into partial differential ones, by the usual process of taking the limit when \(\Delta s \to 0\), in the following form:
Alternatively, Eq. (42) may be written with the use of the kinematic relation (37) as,
Notice that by using Eqs. (36b,c), (42) may be also rewritten as,
or, from (43),
The first terms in brackets, either in Eqs. (44) or (45) are, in fact, Love’s equations for the static equilibrium of curved bars on the plane. Therefore, they are identically null. The (perturbed) dynamic variables are, therefore, governed by the following coupled nonlinear partial differential equations:
or, given just in terms of the displacements \(u\left( {s,t} \right)\) and \(v\left( {s,t} \right)\),
On the other hand, the third planar static Love’s equation that relates bending moment and shear force may be written, in the absence of any external applied moment per unit length as,
Consistently with the kinematic relation (37), and considering that the slenderness of the structure makes the effect of the rotatory inertia negligible, the corresponding dynamic equation regarding the rotation would be written as:
where \(\mu \left( {s,t} \right)\) is the dynamic parcel of the bending moment. In fact, this is a quasi-static approximation.
Therefore, bending moment and shear may be said to be simply related by
On the other hand, from the three basic and usual hypotheses: (1) small strains; (2) linear relations between stresses and strains; (3) Kirchhoff’s ‘plane sections remain plane after deformation,’ the following constitutive equation may be assumed valid:
where EI is the bending stiffness at section s, and \(\chi \left( {s,t} \right)\) is the total curvature. The following relations, regarding the static and dynamic parcels, are then promptly derived:
From (48) and (49), it follows that
Also, using (51) in (50) and then substituting the result in Eq. (42,b), it follows that
In the common case in which the bending stiffness is assumed constant along the line, Eq. (54) reduces to:
Equation (55) is a fundamental result to be used in the local analysis, close to TDP, via the boundary layer technique. It can be used in the vicinity of the hang-off point as well, see [15].
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shoghi, R., Shiri, H. & Pesce, C.P. Dynamic curvature of a steel catenary riser on elastic seabed considering trench shoulder effects: an analytical model. J Braz. Soc. Mech. Sci. Eng. 46, 36 (2024). https://doi.org/10.1007/s40430-023-04608-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-023-04608-w