
Abstract
Convective coherent structures shape the atmospheric boundary layer over the lifecycle of marine cold-air outbreaks (CAOs). Aircraft measurements have been used to characterize such structures in past CAOs. Yet, aircraft case studies are limited to snapshots of a few hours and do not capture how coherent structures, and the associated boundary-layer characteristics, change over the CAO time scale, which can be on the order of several days. We present a novel ship-based approach to determine the evolution of the coherent-structure characteristics, based on profiling lidar observations. Over the lifecycle of a multi-day CAO we show how these structures interact with boundary-layer characteristics, simultaneously obtained by a multi-sensor set-up. Observations are taken during the Iceland Greenland Seas Project’s wintertime cruise in February and March 2018. For the evaluated CAO event, we successfully identify cellular coherent structures of varying size in the order of 4 \(\times \) 10\(^2\) m to 10\(^4\) m and velocity amplitudes of up to 0.5 m \(\hbox {s}^{-1}\) in the vertical and 1 m \(\hbox {s}^{-1}\) in the horizontal. The structures’ characteristics are sensitive to the near-surface stability and the Richardson number. We observe the largest coherent structures most frequently for conditions when turbulence generation is weakly buoyancy dominated. Structures of increasing size contribute efficiently to the overturning of the boundary layer and are linked to the growth of the convective boundary-layer depth. The new approach provides robust statistics for organized convection, which would be easy to extend by additional observations during convective events from vessels of opportunity operating in relevant areas.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Large temperature differences between the atmosphere and ocean typically develop due to the advection of cold air over a warmer ocean surface. This process is often referred to as a marine cold-air outbreak (CAO). The elevated turbulent fluxes of sensible and latent heat initiated by the large air–sea temperature contrast can easily reach several hundreds of W \(\hbox {m}^{-2}\), or, in extreme cases, even exceed 1000 W \(\hbox {m}^{-2}\) (Grossman and Betts 1990). Organized convective structures contribute an essential part to these compensating fluxes. Detailed statistical sampling of the parameters necessary to characterize these structures is still sparse in the relevant regions. During the Iceland–Greenland Seas Project (IGP) in February and March 2018 we observed several CAO events from aboard the NRV Alliance (Renfrew et al. 2019). For one of these CAOs we investigate the impact of organized convective-structure development on the evolution of the instabilities and the turbulent fluxes.
The heat fluxes during CAOs typically result in significant boundary-layer warming and moistening (e.g., Papritz and Spengler 2017). Further, Papritz and Sodemann (2018) found that CAOs create an intense local water cycle, with rapid turnover of water vapour associated with a distinct signature in the stable water isotope composition (Thurnherr et al. 2020). The warming and moistening of the atmosphere occurs at the expense of ocean surface-layer cooling and salinification, important drivers for the formation of dense water and thus important for the global ocean circulation (Buckley and Marshall 2016). The turbulent heat fluxes into the atmospheric boundary layer also play an important role for the maturing of polar lows responsible for high-impact weather conditions in the Nordic Seas and the adjacent coasts (e.g., Føre et al. 2011). Consequently, regional weather as well as the global climate system are directly affected by elevated turbulent heat fluxes during CAOs.
Organized convection, which results in coherent structures in the wind, temperature, and moisture fields, was found to contribute an essential part to these turbulent heat fluxes (e.g., LeMone 1973; Chou and Ferguson 1991; Brilouet et al. 2020). Mesoscale shallow convection patterns, such as roll vortices, open cellular convection, and closed cellular convection, are generally affiliated with marine CAO events (Atkinson and Zhang 1996). Even though these mesoscale structures have received major attention in the past, small-scale cellular structures, comparable to cellular Rayleigh–Bénard convection, studied in laboratory experiments, are also important in the convective marine atmospheric boundary layer (MABL) (Cieszelski 1998). Mesoscale convection often manifests in the form of organized cloud patterns clearly seen in satellite images. However, characterizing small-scale convection requires more detailed observations of the meteorological variables, such as wind speed and direction, in the MABL.
Previous case studies of marine CAOs have identified coherent-structure characteristics from research aircraft measurements (Atlas et al. 1986; Chang and Braham 1991; Brümmer 1996; Hartmann et al. 1997; Cieszelski 1998; Renfrew and Moore 1999; Cook and Renfrew 2015; Brilouet et al. 2017). These studies determined coherent-structure characteristics, such as along and across wind asymmetries, the wavelength and aspect ratio of roll vortices, and snapshots of the turbulence characteristics throughout the MABL. Yet research flights only have a few hours to sample. Thus, the estimated characteristics of coherent structures are averages over short periods, and the evolution of coherent structures in time remains poorly sampled. Hence, achieving detailed statistical sampling of coherent structures during CAO conditions is an important goal of this study.
Here, we utilize ship-based observations from the Iceland and Greenland Seas region, obtained by a multi-sensor set-up during the IGP campaign. A distinct CAO case forms the basis of our study. We sampled profiles of the core MABL variables, such as temperature, humidity, precipitation, and wind with three remote-sensing instruments: a passive microwave radiometer, a micro rain radar, and a wind-profiling Doppler lidar. The resulting observations provide improved temporal and vertical resolutions compared to those provided by aircraft measurements. Brooks et al. (2017) demonstrate the large potential of such multi-sensor and ship-based MABL estimates, utilizing a similar set of remote-sensing instrumentation. Nonetheless, the sampling of coherent structures remains challenging with the available instrumentation and from aboard a ship exposed to wave motion. Here, we use motion-compensated lidar observations to identify coherent structures and investigate their temporal development. Such an improved statistical sampling of the coherent structures over the lifecycle of CAOs directly contributes to the overall goal of the IGP mission. The project aims to identify and characterize the exact atmospheric mechanisms, including the impact of coherent structures, involved in the high-latitude water mass transformations. In this study, we provide the methodology to estimate the coherent-structure characteristics from observations over the lifecycle of a CAO, evaluate the inter-dependency of the structures’ characteristics, and evaluate the processes which link the structure evolution to the respective boundary-layer characteristics.
2 The Iceland and Greenland Seas’ Cruise
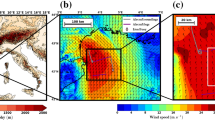
We focus on the ship-based part of the IGP campaign, which lasted 43 days, starting on 6 February and terminating on 21 March 2018 in Reykjavik, Iceland. For an overview of the entire IGP campaign as well as the major atmospheric and oceanic events over the corresponding observational period we refer the reader to Renfrew et al. (2019). The cruise on the NRV Alliance covered an area of the Iceland and southern Greenland Seas. Over the course of the cruise, Renfrew et al. (2019) identified several marine CAOs, of which we study one in more detail. Figure 1 shows a map of the study area relevant to the IGP cruise (Fig. 1a) and a close up of the area relevant to the ship track corresponding to the evaluated CAO event from 28 February to 3 March (Fig. 1b). Also displayed are radiosonde launches along the track, as well as the sea-surface temperature, SST, and the sea-ice cover averaged over the evaluated CAO period.

a Overview of the area relevant to the IGP cruise and b close-up of the study area in the Greenland and Iceland Seas relevant to the CAO event from 28 February to 3 March, the corresponding track of the NRV Alliance as well as the corresponding average SST, and sea-ice cover from the GHRSST satellite product. Locations and time (UTC) of the ship corresponding to radiosonde launches are indicated along the track. The red cross marks the location of the ship during the example situation discussed in Sect. 4. (Color figure online)

Set-up of instrumentation utilized during the IGP campaign on the NRV Alliance. a Photos of the remote sensing equipment and b photos of the meteorology sensors on the bow mast. c Schematics of the NRV Alliance looking down and in cross-section (CMRE 2017), with the marked instrument locations: radar (orange), lidar (blue), radiometer (purple), isotope container (red), ship’s in situ meteorology (black circle), and the Sea-Bird Scientific digital oceanographic thermometer (green). (Color figure online)
2.1 Ship-Based Observations
Time series of air temperature, \(T_a\); relative humidity, RH; pressure, P; wind speed, ws; and wind direction, wd, were sampled with a 1-min time resolution by three automatic weather stations, situated on the bow mast of the NRV Alliance at \(\approx \) 15 m above sea level. Also, the sea-surface temperature was measured continuously at the bow of the ship using a digital oceanographic thermometer (SBE 38, Sea-Bird Scientific, Bellevue, USA). The data are fully quality controlled (see Renfrew et al. 2021) and time series of measurements are combined and made available by Barrell and Renfrew (2020) in the Centre for Environmental Data Analysis (CEDA) archive.
In addition to the instruments permanently installed on the ship we installed several sensors to obtain a wider range of variables and, in particular, atmospheric profiles of \(T_a\), RH, the three-dimensional wind vector, u, and precipitation properties, in particular the terminal or fall velocity of precipitating particles, \(v_t\). These instruments included a Doppler wind-profiling lidar (WindCube V2 Offshore 8.66, Leosphere, Orsay, France), a micro rain radar (MRR-2, Metek, Elmshorn, Germany), a cavity ring-down spectrometer (L2140-i Ser. No. HIDS2254, Picarro Inc, Sunnyvale, USA) for stable water isotope analysis, and a passive microwave radiometer (RPG-HATPRO-G4, Radiometer Physics GmbH, Meckenheim, Germany). The radiometer was situated on a single axis motion-correction table, following Achtert et al. (2015), to compensate for the roll motion of the ship and minimize motion errors during boundary-layer scans. Ship motion was removed during post-processing from the lidar observations, as described by Duscha et al. (2020). Radar retrievals were re-processed to improve the data for snow-dominated precipitation (Maahn and Kollias 2012). Figure 2 shows the location of the instrumentation during the IGP cruise. The lidar, the radiometer, and the radar were placed on the starboard side of the crew deck \(\approx \) 10 m above sea level and the spectrometer was operated from the isotope container. Radiosondes (RS41, Vaisala, Vantaa, Finland) were launched from the ship at least every 24 h with high-frequency launches throughout intensive observational periods. During the first 24 h of the evaluated CAO event, for example, radiosondes were launched every 3 h. Further specifications of the profiling instruments, in particular the vertical range (m above the respective instrument) and the vertical and temporal resolution, are summarized in Table 1.
2.2 Satellite Observations
We extract the spatial distribution of SST and sea-ice cover over the course of the IGP cruise displayed in Fig. 1b, as well as a series of SST along the track of the NRV Alliance, from the GHRSST satellite product (JPL 2015). The dataset provides daily values at \(0.1^{\circ }~\times ~0.1^{\circ }\) spatial resolution. In addition, infrared and visible satellite images were collected and stored for a predefined domain in real time for the IGP field campaign by the Natural Environment Research Council Earth Observation Data Acquisition and Analysis Service. The images are available up to 35 times per day with a resolution of 500 m.We utilize one of these satellite images to display and evaluate the cloud situation, corresponding to the time and location marked by the red cross in Fig. 1b (see Sect. 4). The image used here is from the MODIS instrument aboard the NASA Aqua satellite.
3 Methodology
3.1 Boundary-Layer Diagnostics
Based on the variables obtained from the ship-installed and ship-launched instrumentation, we estimate several diagnostics that characterize the structure of the MABL. Many of these diagnostics require a profile of potential temperature, \(\theta (z)\), which we estimate from T(z), and p(z), obtained by the radiometer and the radiosondes, respectively. We also calculate the local lapse rate, \({\Delta }\theta /{\Delta }\mathrm{z}\), using \({\Delta }\mathrm{z}\) = 100 m, with the respective level, z, in the centre. We estimate \({\Delta }\theta /{\Delta }\mathrm{z}\) in overlap** intervals every 10 m, starting at \(z = 50\) m above sea level.
3.1.1 Convective Boundary-Layer Depth
The MABL is the layer of the atmosphere that is directly impacted by ocean surface fluxes. It is hence characterized by the presence of mechanically and thermally generated turbulence. During marine CAO events a convective boundary layer develops. In this case the maximum depth of the turbulent convective motion, initiated at the sea surface, predominantly determines the depth of the mixed layer and hence the depth of the MABL. Utilizing the parcel method (Holzworth 1964), we determine the convective boundary-layer depth, \(h_{ b}\). The method relies on the principle of adiabatically following an air parcel from the sea surface, where \(\theta ~=~\theta _{SST}\), to its height of neutral buoyancy. The level that precedes the first instance of \(\theta (z_j)-\theta _{SST} \ge 0\) K, so the level \(z_{j-1}\), is defined as \(h_b\)
The parcel method has been found to work well for convective conditions (Seibert et al. 2000). Additionally, Collaud Coen et al. (2014) found very good agreement of the convective boundary-layer depth between radiometer and radiosonde estimates, utilizing the parcel method. The uncertainty of \(h_b\), in particular for the radiometer, was found to be most sensitive to the accuracy in the measurement of sea-surface temperature, which is within \(\pm 0.5\) K (Collaud Coen et al. 2014). The value of \(h_b\) additionally serves as a measure of the potential maximum vertical extent of convective structures.
3.1.2 Gradient Richardson Number
Even though convective conditions usually predominate during marine CAOs, we still expect wind shear to have a strong influence on turbulence generation. To evaluate the dominant source of near-surface turbulence, we estimate the discretized, near-surface gradient Richardson number, \(Ri_g\) (e.g., Stull 1988)
with g being the the acceleration due to gravity. Here, we estimate \(Ri_g\), centred at \(z~=~100\) m above sea level, utilizing lidar observations of u and v at 50 m and 150 m above sea level in order to estimate the corresponding velocity gradients. We average the lidar estimates over 10 min to match the time resolution of the radiometer estimates of \(\theta (z)\) and the lapse rate between 50 m and 150 m above sea level.
3.1.3 Updraft and Downdraft Velocities
To evaluate the strength of the near-surface turbulent circulation, we estimate the maximum updraft and downdraft velocity, \(w^{\uparrow }_{\max }\) and \(w^{\downarrow }_{\max }\), from lidar observations of the vertical velocity component, w. We evaluate the positive and negative w as two separate time series, using absolute values. For both the updraft and downdraft series we estimate the value of maximum velocity over the whole lidar altitude range at each timestep. We average the resulting series of maximum updraft and downdraft velocities over a 10-min interval to again match the time resolution of the radiometer.
3.1.4 Stable Water Isotope Composition
Cold-air outbreak events feature large humidity gradients and high wind speeds, which lead to intense evaporation from the sea surface (e.g., Papritz and Pfahl 2016). Under such conditions, the stable water isotopes \(\hbox {H}_2^{18}\)O and HDO (deuterium-enriched water) carry a specific signature in the evaporating vapour. We use this isotopic signature here as an integrating process tracer. More specifically, in intense evaporation conditions, the comparably higher diffusion speed of the HDO molecules compared to \(\hbox {H}_2^{18}\)O molecules leads to relatively high values (>15  ) of the secondary isotope parameter d-excess (d) defined as
) of the secondary isotope parameter d-excess (d) defined as
where \(\delta D\) and \(\delta ^{18}O\) denote the deuterium and oxygen-18 abundance in the water vapour relative to VSMOW (Vienna Standard Mean Ocean Water, e.g., Dansgaard 1964). Generally, d in water vapour is close to 10  on a global average, and tends towards lower values as ambient conditions approach saturation (e.g., Pfahl and Sodemann 2014). The particular use of the parameter d in the context of this study is its ability to integrate over the evaporation history and mixing processes of water vapour in an airmass along its trajectory. Within a CAO, the local, high d signal from intense evaporation can be moderated by convective overturning of the MABL that transports comparably dry air with low d vapour, originating from heights dominated by condensation or from outside of the CAO to the surface. The isotope data are available in the CEDA archive (Sodemann and Weng 2022).
on a global average, and tends towards lower values as ambient conditions approach saturation (e.g., Pfahl and Sodemann 2014). The particular use of the parameter d in the context of this study is its ability to integrate over the evaporation history and mixing processes of water vapour in an airmass along its trajectory. Within a CAO, the local, high d signal from intense evaporation can be moderated by convective overturning of the MABL that transports comparably dry air with low d vapour, originating from heights dominated by condensation or from outside of the CAO to the surface. The isotope data are available in the CEDA archive (Sodemann and Weng 2022).
3.1.5 Fetch
Apart from the temporal evolution, the ship-based observations also describe a spatial evolution of the boundary-layer parameters, as the ship moves. This spatial evolution can be quantified by the fetch, f (km), the distance to the sea-ice edge, following the trajectory of the wind. Here, we estimate the fetch on the basis of the sea-ice edge from the GHRSST sea ice product and the locally observed wd, which is varied by ± 5\(^{\circ }\) to achieve an uncertainty estimate.
3.1.6 Surface Heat Fluxes
Turbulent sensible and latent heat fluxes, \(Q_H\) and \(Q_L\), are a measure of the local energy transport of heat and moisture between the ocean and the atmosphere due to turbulent atmospheric motion. We determine these surface fluxes from the ship’s meteorological observations (see Barrell and Renfrew 2020; Renfrew et al. 2021) using the well-established COARE 3.0 bulk flux algorithm (Fairall et al. 2003).
3.2 Coherent Structures
During CAO conditions, convective structures are superimposed on to the mean wind speed, \({\overline{ws}}\). For this study, we rely on the assumption that these structures are stationary, or “frozen”, when sampled (i.e., Taylor’s hypothesis). Also, the presence of advection or movement of the ship is a requirement to capture the convective signal with the lidar. Relative to the ship, convective structures are transported by the mean apparent wind speed, \(\overline{ws_a}\), which results from the sum of u and the ship’s translational velocity vector, \(\mathbf{u} _{{ ship}}\). We apply a rolling average for \({\overline{ws}}\) and \(\overline{ws_a}\) (local Taylor hypothesis). We chose a rolling average of 1 h, as it captures the synoptic and the diurnal variations in the flow, but filters variations due to convective structures \(\le \) O (10\(^4\) m) for the range of apparent wind velocity scales of O (10 m \(\hbox {s}^{-1}\)), obtained during the CAO event. The coherent signal of convection needs to be evaluated along the mean apparent wind direction, \(\overline{wd_a}\). So we rotate u into \(\overline{wd_a}\) and subtract \({\overline{ws}}\) from the rotated u component to obtain the along-wind, cross-wind, and vertical velocity fluctuations, \(u'\), \(v'\), and \(w'\), respectively.
The series of the velocity fluctuations \(u'\), \(v'\), and \(w'\) enable an estimate of the dynamic and spatial properties of coherent structures in the flow.
3.2.1 Cellular Structures
For a set of idealized convective cells, Fig. 3 illustrates how \(u'(t)\) and \(w'(t)\) would be observed by the ship-based lidar set-up at two altitude ranges, \(z_1\) and \(z_2\). In this idealized case, \(u'(t)\) and \(w'(t)\) oscillate with the same period, \(T_{ cell}\). At both displayed levels, the two series are cross-correlated, but have a phase shift \({\Delta }\rho _{u'w'}~=~\pm \) \({\pi }/2\) (± 90\(^{\circ }\)). The sign of \({\Delta }\rho _{u'w'}\) is reversed for the upper and lower part of the cell. This is the case because the sign of \(w'(t)\) is conserved over the depth of the cell (lines overlap), while \(u'(t)\) switches sign from the lower to the upper part of the cell. The wavelength of the advected cell is proportional to the lidar-observed period (\(\lambda _{ cell} \propto T_{ cell} \overline{ws_a}\)).

Schematic of the method utilized to observe cellular coherent structures with the ship-based lidar set-up. The top panel illustrates a cross-section through convective cells, along the mean apparent wind speed \(\overline{ws_a}\). The bottom panels show the series of \(u'(t)\) and \(w'(t)\) the ship-based lidar observes at two levels, \(z_1\) and \(z_2\), when these cells are advected over the ship with \(\overline{ws_a}\)
Figure 3 displays only the two-dimensional, observational perspective from the ship-based lidar of a phenomenon that is three-dimensional in reality. In the idealized case, the convective cells are horizontally isotropic. Consider the case that the centre of such an isotropic cell is advected over the ship with \(\overline{ws_a}\). Here, the amplitude, \(u'_A\), of the observed \(u'\) is maximal, while the amplitude, \(v'_A\), of the observed \(v'\) is zero. Now consider the case that a cell is advected over the ship at a certain distance to its centre. Here, we expect to observe a contribution of the cellular circulation to \(v'_A\). In contrast to the \(u'\) series, which is phase-shifted to \(w'\) by \(\pm {\pi } / 2\) (Fig. 3), the corresponding \(v'\) series is instead anti-correlated to \(w'\), hence phase-shifted by \({\pi }\). The ratio between \(v'_A\) and \(u'_A\) increases if the cell is sampled at an increasing distance to its center and this ratio can even exceed 1. Yet, the absolute values of \(u'_A\) and \(v'_A\) decrease towards the cell’s edges rendering the coherent signal less reliable. Only if the cell passes the ship at approximately half the distance between its centre and edge is \(v'_A\) expected to yield a considerable coherent signal. Thus, in contrast to \(u'\), the evaluation of \(v'\) is only reliable if a comparably narrow segment of the subsequent cells passes over the ship. This narrow segment is more likely to be missed by our set-up, compared to the larger segment relevant to the analysis of \(u'\). Therefore, we focus our investigation on the estimation of the coherent signal between \(u'\) and \(w'\) to identify cellular coherent structures with the ship-based set-up.
3.2.2 Spectral Analysis
Based on the assumptions presented above, a measure of cross-correlation between the series of \(u'\) and \(w'\), and a corresponding estimate of the phase shift for a range of periods or wavelengths can provide information about the presence of convective structures in the flow, including their respective \(T_{ cell}\) and \(\lambda _{ cell}\). The coherence spectrum \(Co_{u'w'}\) is a measure for normalized cross-correlation between \(u'\) and \(w'\) (Emery and Thomson 2001)
where \(G_{u'w'}\) is the cross-covariance spectrum of \(u'\) and \(w'\), and \(G_{u'w'}^T\) its complex conjugate. Further, \(G_{u'u'}\) and \(G_{w'w'}\) are the auto-correlation spectra of \(u'\) and \(w'\), respectively. The \(Co_{u'w'}\) takes on values between 0 and 1, where 0 implies that \(u'\) and \(w'\) are not correlated, while 1 implies that \(u'\) and \(w'\) are correlated for a certain period or wavelength. If coherent structures are present in the flow, we expect to detect a spike in the \(Co_{u'w'}\) at \(T_{ cell}\) or \(\lambda _{ cell}\), respectively. A spike in the \(Co_{u'w'}\) is the necessary condition for the presence of coherent structures. The corresponding sufficient condition is the presence of a phase shift of \(\pm {\pi }/2\) between \(u'\) and \(w'\) at the spike in the \(Co_{u'w'}\) (see Sect. 3.2.1). The phase spectrum \(\rho _{u'w'}\) is defined as follows (Emery and Thomson 2001)
With \(Co_{u'w'}\) and \(\rho _{u'w'}\) we can identify if coherent structures are superimposed on to the mean flow and estimate their horizontal length scale, \(L_{h,c}\), along \(\overline{wd_a}\).
3.2.3 The Coherent Length Scale
We found that the periodicity of the convective structures is sensitive to temporal changes in \(\overline{ws_a}\), which can cause corresponding spikes in the frequency dependent \(Co_{u'w'}\) to widen and reduce in maximum value. A reliable interpretation of convection in the time domain is therefore not given (Lohse and ** observations corresponding to a few single convective structures. Investigating the observed structures in such detail will be the subject of a subsequent study. Yet to achieve statistics on coherent-structure characteristics applicable to the extensive range of CAO conditions in the Arctic, a larger observational basis is required. Such enhanced statistics on atmospheric convection during CAOs can, for example, be beneficial to model validation. Here, one should consider the utility of ship-based remote sensing, e.g., by ships of opportunity, which are operated in relevant but remote locations.
References
Abel SJ, Boutle IA, Waite K, Fox S, Brown PRA, Cotton R, Lloyd G, Choularton TW, Bower KN (2017) The role of precipitation in controlling the transition from stratocumulus to cumulus clouds in a northern hemisphere cold-air outbreak. J Atmos Sci 74(7):2293–2314. https://doi.org/10.1175/JAS-D-16-0362.1
Achtert P, Brooks I, Brooks B, Moat B, Prytherch J, Persson O, Tjernström M (2015) Measurement of wind profiles by motion-stabilised ship-borne Doppler lidar. Atmos Meas Tech 8:4993–5007. https://doi.org/10.5194/amt-8-4993-2015
Atkinson BW, Zhang JW (1996) Mesoscale shallow convection in the atmosphere. Rev Geophys 34(4):403–431. https://doi.org/10.1029/96RG02623
Atlas D, Walter B, Chou SH, Sheu PJ (1986) The structure of the unstable marine boundary layer viewed by lidar and aircraft observations. J Atmos Sci 43(13):1301–1318
Barrell C, Renfrew I (2020) Iceland Greenland seas Project (IGP): surface layer meteorological measurements on board the NATO research vessel Alliance. Centre for Environmental Data Analysis. https://catalogue.ceda.ac.uk/uuid/b4ba8f11459c422d84d7293b9211ccf7
Barthlott C, Drobinski P, Fesquet C, Dubos T, Pietras C (2007) Long-term study of coherent structures in the atmospheric surface layer. Boundary-Layer Meteorol 125:1–24. https://doi.org/10.1007/s10546-007-9190-9
Brilouet PE, Durand P, Canut G (2017) The marine atmospheric boundary layer under strong wind conditions: Organized turbulence structure and flux estimates by airborne measurements. J Geophys Res Atmos 122(4):2115–2130. https://doi.org/10.1002/2016JD025960
Brilouet PE, Durand P, Canut G, Fourrié N (2020) Organized turbulence in a cold-air outbreak: Evaluating a large-eddy simulation with respect to airborne measurements. Boundary-Layer Meteorol 175(1):57–91. https://doi.org/10.1007/s10546-019-00499-4
Brooks BJ (2019a) Iceland Greenland seas Project (IGP): Humidity and temperature profiles from the NCAS Humidity And Temperature PROfilers (HATPRO) scanning radiometer on board the alliance research vessel. Centre for Environ Data Anal. https://catalogue.ceda.ac.uk/uuid/35f30876a4894169bb1ebeafe1e0c447
Brooks BJ (2019b) Iceland Greenland seas Project (IGP): Upper air sounding: Profiles of temperature, pressure, humidity, wind speed and wind direction. Centre for Environmental Data Analysis. https://catalogue.ceda.ac.uk/uuid/5acca11ececb4d8283b7e633370b6751
Brooks IM, Tjernström M, Persson POG, Shupe MD, Atkinson RA, Canut G, Birch CE, Mauritsen T, Sedlar J, Brooks BJ (2017) The turbulent structure of the arctic summer boundary layer during the arctic summer cloud-ocean study. J Geophys Res Atmos 122(18):9685–9704. https://doi.org/10.1002/2017JD027234
Brümmer B (1996) Boundary-layer modification in wintertime cold-air outbreaks from the arctic sea ice. Boundary-Layer Meteorol 80:109–125. https://doi.org/10.1007/BF00119014
Buckley MW, Marshall J (2016) Observations, inferences, and mechanisms of the Atlantic Meridional Overturning Circulation: A review. Rev Geophys 54(1):5–63. https://doi.org/10.1002/2015RG000493
Chang SS, Roscoe Braham JR (1991) Observational study of a convective internal boundary layer over lake Michigan. J Atmos Sci 48(20):2265–2279
Chou SH, Ferguson MP (1991) Heat fluxes and roll circulations over the western gulf stream during an intense cold-air outbreak. Boundary-Layer Meteorol 55(3):255–281. https://doi.org/10.1007/BF00122580
Cieszelski R (1998) A case study of Rayleigh-Bénard convection with clouds. Boundary-Layer Meteorol 88(2):211–237. https://doi.org/10.1023/A:1001145803614
CMRE (2017) NRV alliance drawings. Science and technology organisation centre for maritime research and experimentation, Tech rep
Collaud Coen M, Praz C, Haefele A, Ruffieux D, Kaufmann P, Calpini B (2014) Determination and climatology of the planetary boundary layer height above the Swiss plateau by in situ and remote sensing measurements as well as by the COSMO-2 model. Atmos Chem Phys 14(23):13,205-13,221. https://doi.org/10.5194/acp-14-13205-2014
Cook P, Renfrew I (2015) Aircraft-based observations of air-sea turbulent fluxes around the British Isles: Observations of air-sea fluxes. Q J R Meteorol Soc 141:139–152. https://doi.org/10.1002/qj.2345
Dansgaard W (1964) Stable isotopes in precipitation. Tellus 16(4):436–468. https://doi.org/10.1111/j.2153-3490.1964.tb00181.x
Duscha C (2020) Iceland Greenland seas Project (IGP): three dimensional wind profile measurements from the University of Bergen Windcube V2 pulsed lidar on board the NATO research vessel Alliance. Centre Environ Data Anal. https://catalogue.ceda.ac.uk/uuid/cc93b95c264644519777aa1ab37c23c0
Duscha C, Bakhoday-Paskyabi M, Reuder J (2020) Statistic and coherence response of ship-based lidar observations to motion compensation. Journal of Physics conference series. In: Proceedings of the 17th EERA DeepWind Conference, Trondheim, Norway https://doi.org/10.1088/1742-6596/1669/1/012020
Emery WJ, Thomson RE (2001) Data analysis methods in physical oceanography - time-series analysis methods. Elsevier Science, chap 5:371–567. https://doi.org/10.1016/B978-044450756-3/50006-X
Fairall CW, Bradley EF, Hare JE, Grachev AA, Edson JB (2003) Bulk parameterization of air-sea fluxes: Updates and verification for the COARE algorithm. J Clim 16(4):571–591
Fletcher J, Mason S, Jakob C (2016) The climatology, meteorology, and boundary layer structure of marine cold air outbreaks in both hemispheres. J Clim 29(6):1999–2014. https://doi.org/10.1175/JCLI-D-15-0268.1
Føre I, Kristjánsson JE, Saetra Ø, Breivik Ø, Røsting B, Shapiro M (2011) The full life cycle of a polar low over the norwegian sea observed by three research aircraft flights. Q J R Meteorol Soc 137(660):1659–1673. https://doi.org/10.1002/qj.825
Grossman RL, Betts AK (1990) Air-sea interaction during an extreme cold air outbreak from the eastern coast of the United States. Mon Weather Rev 118(2):324–342
Hartmann J, Kottmeier C, Raasch S (1997) Roll vortices and boundary-layer development during a cold air outbreak. Boundary-Layer Meteorol 84:45–65. https://doi.org/10.1023/A:1000392931768
Holzworth GC (1964) Estimates of mean maximum mixing depths in the contiguous United States. Mon Weather Rev 92(5):235–242
Hu Y, Ecke RE, Ahlers G (1995) Time and length scales in rotating Rayleigh-Bénard convection. Phys Rev Lett 74:5040–5043. https://doi.org/10.1103/PhysRevLett.74.5040
JPL (2015) GHRSST level 4 MUR Global Foundation Sea Surface Temperature analysis (v4.1), accessed 2020-01-27. https://doi.org/10.5067/GHGMR-4FJ04
LeMone MA (1973) The structure and dynamics of horizontal roll vortices in the planetary boundary layer. J Atmos Sci 30(6):1077–1091
Lohse D, **a KQ (2010) Small-scale properties of turbulent Rayleigh-Bénard convection. Annu Rev Fluid Mech 42(1):335–364
Maahn M, Kollias P (2012) Improved micro rain radar snow measurements using Doppler spectra post-processing. Atmos Meas Tech 5(11):2661–2673. https://doi.org/10.5194/amt-5-2661-2012
Papritz L, Pfahl S (2016) Importance of latent heating in mesocyclones for the decay of cold air outbreaks: a numerical process study from the pacific sector of the southern ocean. Mon Weather Rev 144(1):315–336. https://doi.org/10.1175/MWR-D-15-0268.1
Papritz L, Sodemann H (2018) Characterizing the local and intense water cycle during a cold air outbreak in the nordic seas. Mon Weather Rev 146(11):3567–3588. https://doi.org/10.1175/MWR-D-18-0172.1
Papritz L, Spengler T (2017) A lagrangian climatology of wintertime cold air outbreaks in the Irminger and Nordic seas and their role in sha** air-sea heat fluxes. J Clim 30(8):2717–2737. https://doi.org/10.1175/JCLI-D-16-0605.1
Pfahl S, Sodemann H (2014) What controls deuterium excess in global precipitation? Clim Past 10:771–781. https://doi.org/10.3929/ethz-b-000082937
Pinton JF, Labbé R (1994) Correction to the taylor hypothesis in swirling flows. J Phys II France 4(9):1461–1468. https://doi.org/10.1051/jp2:1994211
Renfrew IA, Moore GWK (1999) An extreme cold-air outbreak over the Labrador sea: Roll vortices and air-sea interaction. Mon Weather Rev 127(10):2379–2394
Renfrew IA, Pickart RS, Våge K, Moore GWK, Bracegirdle TJ, Elvidge AD, Jeansson E, Lachlan-Cope T, McRaven LT, Papritz L, Reuder J, Sodemann H, Terpstra A, Waterman S, Valdimarsson H, Weiss A, Almansi M, Bahr F, Brakstad A, Barrell C, Brooke JK, Brooks BJ, Brooks IM, Brooks ME, Bruvik EM, Duscha C, Fer I, Golid HM, Hallerstig M, Hessevik I, Huang J, Houghton L, Jónsson S, Jonassen M, Jackson K, Kvalsund K, Kolstad EW, Konstali K, Kristiansen J, Ladkin R, Lin P, Macrander A, Mitchell A, Olafsson H, Pacini A, Payne C, Palmason B, Pérez-Hernández MD, Peterson AK, Petersen GN, Pisareva MN, Pope JO, Seidl A, Semper S, Sergeev D, Skjelsvik S, Søiland H, Smith D, Spall MA, Spengler T, Touzeau A, Tupper G, Weng Y, Williams KD, Yang X, Zhou S (2019) The iceland greenland seas project. Bull Am Meteorol Soc 100(9):1795–1817. https://doi.org/10.1175/BAMS-D-18-0217.1
Renfrew IA, Barrell C, Elvidge AD, Brooke JK, Duscha C, King JC, Kristiansen J, Cope TL, Moore GWK, Pickart RS, Reuder J, Sandu I, Sergeev D, Terpstra A, Våge K, Weiss A (2021) An evaluation of surface meteorology and fluxes over the Iceland and Greenland seas in ERA5 reanalysis: the impact of sea ice distribution. Q J R Meteorol Soc 147(734):691–712. https://doi.org/10.1002/qj.3941
Salesky ST, Chamecki M, Bou-Zeid E (2017) On the nature of the transition between roll and cellular organization in the convective boundary layer. Boundary-Layer Meteorol 163:41–68. https://doi.org/10.1007/s10546-016-0220-3
Seibert P, Beyrich F, Gryning SE, Joffre S, Rasmussen A, Tercier P (2000) Review and intercomparison of operational methods for the determination of the mixing height. Atmos Environ 34(7):1001–1027. https://doi.org/10.1016/S1352-2310(99)00349-0
Sodemann H (2021) Iceland Greenland seas Project (IGP): precipitation measurements from the university of bergen micro rain radar (MRR2) on board the nato research vessel alliance. Centre for Environmental Data Analysis. https://catalogue.ceda.ac.uk/uuid/dc723f82939843f199fff78778d5b8d0
Sodemann H, Weng Y (2022) Iceland-Greenland Seas Project (IGP): water isotope measurements from theUniversity of Bergen vapour isotope analyzer on board the NATO Research Vessel Alliance withinSNOWPACE. NERC EDS Centre for Environmental Data Analysis, 09 March 2022.https://doi.org/10.5285/705abc2d9988444ba79e942f22219bc0.
Stull RB (1988) An introduction to boundary layer meteorology. Springer, Dordrecht. https://doi.org/10.1007/978-94-009-3027-8
Thurnherr I, Hartmuth K, Jansing L, Gehring J, Boettcher M, Gorodetskaya I, Werner M, Wernli H, Aemisegger F (2020) The role of air-sea fluxes for the water vapour isotope signals in the cold and warm sectors of extratropical cyclones over the southern ocean. Weather Clim Dyn Discuss 2020:1–42. https://doi.org/10.5194/wcd-2020-46
Acknowledgements
This study was a part of the Iceland Greenland Seas Project. We are grateful for the constructive comments and insightful questions from the four anonymous reviewers, that helped to substantially improve the manuscript. We thank A. Seidl, A. Terpstra, S. Zou and Y. Weng for the set-up, maintenance and documentation of the ship-based instrumentation and measurements. We also thank M. Kähnert for hel** with the formal editing and proofreading of the manuscript. J. Reuder acknowledges the Offshore Boundary Layer Observatory, OBLO, funded by the Research Council of Norway (NRF Grant No. 227777) for access to the WindCube V2 lidar system. H. Sodemann acknowledges the projects FARLAB (NRF Grant No. 245907) and SNOWPACE (NRF Grant No. 262710) for the stable water isotope instrumentation and measurements, respectively. The HATPRO and radiosounding system were provided by the Atmospheric Measurement and Observations Facility (AMOF) of the National Centre for Atmospheric Science (NCAS). The radiosondes were funded by the Atmospheric Forcing of the Iceland Sea project (AFIS) via the Natural Environment Research Council (NERC) Grant NE/N009754/1, which also partly funded the contribution of I. Renfrew and C. Barrell to the study.
Funding
Open access funding provided by University of Bergen (incl Haukeland University Hospital).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Applicability to Mesoscale Convection and Roll Vortices
Appendix: Applicability to Mesoscale Convection and Roll Vortices
For the utilized ship-based lidar set-up, the presented methodology (Sect. 3.2) is restricted to estimates of \(L_{h,c}\) along the apparent wind direction, \(\overline{wd_a}\). For a horizontally isotropic convective cell, the estimated \(L_{h,c}\) from spectral analysis directly represents its spatial extent. Yet, previous CAO studies (e.g., Atkinson and Zhang 1996; Hartmann et al. 1997; Renfrew and Moore 1999) report the presence of roll vortices, convective structures that have a much larger spatial extent along-wind than cross-wind. Due to this horizontal anisotropy, these structures need to be interpreted with care in terms of \(L_{h,c}\). The longitudinal axis of rolls tends to align with a small angle, \(\alpha \), to the mean wind direction. This is, for example, discussed by Atkinson and Zhang (1996), and evident in large-eddy simulations by Brilouet et al. (2020). Cross-wind movement of the ship can introduce an increased \(\alpha \), relative to \(\overline{wd_a}\). The roll circulation, \(v'_{roll}\), perpendicular to the longitudinal roll axis, projected to \(u'_A\) and \(v'_A\) yields the following dependencies
When rolls are present in the flow and \(\alpha \) is small yet larger than \(0^{\circ }\) the coherent signal, obtained by the ship-based lidar, has a much larger contribution to \(v'_A\), than to \(u'_A\). The distribution of the ratio between \(u'_A\) and \(v'_A\) is expected to clearly shift to values close to zero. The \(v'\) series is proportional to \(v'_{roll}\), which follows an analogous circulation with \(w'\) as illustrated in Fig. 3 in the cross-wind direction. The obtained \(v'\) for the roll case is thus phase-shifted by \(\pm {\pi }/2\) to the corresponding \(w'\), in contrast to \(v'\) for isotropic cells. Hence, in the presence of roll vortices, one should also take \(Co_{v'w'}\) and \(\rho _{v'w'}\) into account as an criterion for the estimation of \(L_{h,c}\). On the one hand, \(v'\) is expected to yield a much clearer coherent signal, at least for small \(\alpha \). On the other hand, a corresponding phase shift between \(v'\) and \(w'\), which is close to \(\pm {\pi }/2\), provides the sufficient criterion that rolls are present in the flow. We tested this criterion for the evaluated CAO period, yet found no evidence that such anisotropic structures are present.
In the roll case, an estimate of \(L_{h,c}\) using the proposed method will correspond to the wavelength, \(\lambda '_{roll}\), which describes the roll wavelength, \(\lambda _{roll}\), transposed to the axis of \(\overline{wd_a}\)
The obtained \(L_{h,c}\) for rolls will be larger than the roll extent perpendicular to the longitudinal roll axis and smaller than the extent parallel to this axis.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Duscha, C., Barrell, C., Renfrew, I.A. et al. A Ship-Based Characterization of Coherent Boundary-Layer Structures Over the Lifecycle of a Marine Cold-Air Outbreak. Boundary-Layer Meteorol 183, 355–380 (2022). https://doi.org/10.1007/s10546-022-00692-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10546-022-00692-y