
Abstract
Nonstructural components (NSCs) are elements within the building unrelated to the lateral load-carrying system. Failure of NSCs during earthquakes can result in casualties, significant economic losses, disabled critical infrastructures, and loss of building functionality. The NSCs can be categorized into two primary groups: deformation-sensitive and acceleration-sensitive. Thanks to well-established seismic design guidelines and standards, buildings may suffer minor seismic deformations – resulting in lesser damage to deformation-sensitive components. However, planning under the peak floor response or peak floor acceleration (PFA) is getting much less attention – exposing the acceleration-sensitive components to greater risk. This manuscript develops equations for moment-resisting reinforced concrete frames (MRRCFs) that estimate the total floor acceleration. The data is gathered based on 984 inelastic response simulations, elaborated to create an idealized equation based on the earthquake characteristics. The developed equation offers engineers a quantitative approach to understanding the inertial forces applied to the NSCs within the building during earthquakes, allowing them to plan for potential risks due to earthquakes.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nonstructural components (NSCs) are elements within the building unrelated to the load-bearing system. In addressing their sensitivity to dynamic loads (i.e., winds and earthquakes), The NSCs are classified into two categories (e.g., ASCE 2000): acceleration-sensitive (e.g., generators, acoustic suspended ceilings, mechanical equipment, and elevators) and deformation-sensitive (e.g., masonry infills and glazing walls). The comprehensive report by Taghavi and Miranda (2003), as part of the Pacific Earthquake Engineering Research Center (PEER), underscores the significance of NSCs in maintaining structural serviceability. Extreme damage to NSCs, as elucidated in their study, not only jeopardizes the structure’s functionality but can also lead to injuries and substantial economic losses. However, despite numerous methodologies for estimating the seismic response of NSCs since the 1970s, these are not yet incorporated into code provision, as highlighted in a review Wang et al. (2021). Despite the accumulated knowledge, modern building codes have yet to fully integrate these procedures, underscoring the need for further progress in this critical area.
Very few studies investigate the relationship between earthquake properties and the level of seismic accelerations applied to the structure. The research conducted by Elenas and Meskouris (2001) delves into the seismic response analysis of an 8-story reinforced concrete frame structure subjected to 13 different ground motion records. Employing Pearson’s and Spearman’s correlation coefficients, this study reveals a strong correlation between total acceleration, Arias intensity (IA), and peak ground velocity (PGV). The study conducted by Reinoso and Miranda (2005) presented results from six instrumented tall buildings, one of which was subjected to four recorded earthquake ground motions. The findings of the structure exposed to four ground motions indicated a positive correlation between structural accelerations and peak ground accelerations (PGA). Nevertheless, it is important to note that this conclusion is based on data from a single structure and only a few records and that no additional ground motion intensity measures (GMIM) were evaluated.
Further supporting the direct connection between PGA and structural acceleration is the study by Kim and White (2004). This study concentrates on a single-story building subjected to four seismic tests with varying maximum input accelerations, emphasizing a positive correlation between PGA and structural accelerations. Similar to the previous study, this study does not explore other GMIMs besides PGA, stressing the need for more comprehensive datasets to enrich our understanding of seismic response characteristics.
In the study by Baker (2007), a linear-elastic analysis was conducted on three structural configurations: one frame structure and two wall structures. The primary aim of this study was to predict the NSC’s acceleration demand in response to recorded earthquake ground motions. In achieving their objective, three different GMIMs were considered: equipment relative average spectral acceleration (E-ASAR), PGA, and spectral acceleration at the fundamental frequency (Spa(f1)). The analysis utilized a comprehensive dataset comprising 2,011 records. The study results indicate that PGA is the most reliable GMIM for estimating floor response spectra (FRS) in frame structures, while E-ASAR is a more suitable choice for characterizing FRS in wall structures.
In recent decades, a few equations for estimating multistory building peak floor acceleration (PFA) were proposed in the literature. One of the more notable works is that of Taghavi and Miranda (2004), who analyzed three different structural systems (six-story dual system, 13-story, and 30-story moment-resisting frames) under 80 earthquake records of PGA ranging between 0.03 g and 0.44 g. Their examination refers to small and moderate earthquakes, so the structure is expected to remain in the elastic range. Fathali and Lizundia (2011) propose empirical equations when earthquakes of PGA up to 0.523 g are concerned. The equations stem from the earthquake response of 16 structural systems under 37 earthquake records. They also suggest empirical equations for existing buildings and buildings in their design stage. The NIST (2018) report provides solutions explicitly to improve the seismic performance of NSCs and offers equations for estimating PFA. The equations depend on the structural characteristics rather than the ground motion parameters and employ earthquake records characterized by PGA greater than 0.20 g.
In this paper, we study the correlation between different GMIMs and the structural response regarding total and relative floor acceleration and propose an equation for evaluating the maximum total acceleration of MRRCF systems. We focus on a plane strain analysis of inelastic MRRCF systems at a broad range of fundamental periods (between 0.5 s and 4.0 s). The eight MRRCFs designed especially for this work will be examined under 123 ground motion time-histories within a broad range of intensities, yielding about 984 inelastic response simulations. The uniqueness of this study lies in the use of nonlinear simulations, coupled with an exploration into the impact of structural characteristics and GMIMs on the total structural acceleration.
2 Dynamic equilibrium and parametric notations
The empirical equations developed in this paper stem from the correlation level between the floor accelerations and the earthquake characteristics. More particularly, we include two different definitions for floor acceleration (relative and total) and five GMIMs. First, we formulate the equation governing the dynamic equilibrium of an MRRCF system subjected to a ground motion. That is:
where \( \mathbf{u}\left(\text{t}\right)\) is the relative-to-ground displacement vector, \( \dot{\mathbf{u}}\left(\text{t}\right)\) is the relative velocities vector, \( \ddot{\mathbf{u}}\left(\text{t}\right)\) is the relative accelerations vector, \( \mathbf{c}\) is the inherent Caughey dam** matrix, \( 1\) is a unity vector, \( {\ddot{u}}_{g}\left(t\right)\) is the ground acceleration, \( \mathbf{m}\) is the mass matrix, and \( {\mathbf{f}}^{\text{R}}\left(\text{t}\right)\) is the inelastic lateral resisting forces vector. The maximum total acceleration is calculated by:
The correlations of \( {\ddot{\text{u}}}^{\text{m}\text{a}\text{x}}\)/\( {\ddot{\text{u}}}^{\text{t},\text{m}\text{a}\text{x}}\) and the GMIM, namely PGA, PGV, peak-ground-displacement (PGD), cumulative-absolute-velocity (CAV), and IA, are quantified and elaborated when a high level exists.
Pearson correlation coefficient and Spearman’s rank correlation coefficient are used to quantify the relationship between structural accelerations and earthquake characteristics. Their respective formulas are given by:
where, in Eqs. (3) and (4), n is the number of observations (number of ground motions), \( {x}_{i}\) is the ith observasion’s earthquake characteristic quantity (i.e., PGA, PGV, PGD, CAV, or IA), and \( {y}_{i}\) is the ith observasion’s peak response, which is either of the following:
Also, in Eq. (4), \( {d}_{i}\) is the difference between the two ranks of observation \( {x}_{\text{i}}\) and \( {y}_{\text{i}}\), \( \mathcal{R}\left({x}_{i}\right)\) returns the rank of \( {x}_{i}\) in the array of \( \left\{\begin{array}{ccc}{\text{x}}_{1},& \dots &,{x}_{n}\end{array}\right\}\), and \( \mathcal{R}\left({y}_{i}\right)\) returns the rank of \( {y}_{i}\) in the array of \( \left\{\begin{array}{ccc}{y}_{1},& \dots &,{y}_{n}\end{array}\right\}\).
The Pearson correlation coefficient shows the level of a linear relationship, and Spearman’s rank correlation indicates the monotonous connection between the samples and the results. Having both formulas indicating a high correlation implies a strong relationship. In this paper, when both expressions point to a high level of correlation, the connection is elaborated into an empirical function.
3 Ground motion time-histories and structures
In this study, 123 ground motion time-histories are used. These ground motions are instrumental for our research on a plane strain analysis of MRRCFs. To comprehensively explore the seismic response of MRRCFs, we designed eight unique MRRCF models, each characterized by variations in weight, height, and span configurations. This resulted in a total of 984 simulation scenarios. The primary objective of our analysis is to determine the maximum accelerations experienced by these MRRCFs, which is accomplished through inelastic response analysis.
3.1 Earthquake ensemble
Figure 1(a) shows the magnitude-distance distribution of the ground motion time-histories used in this study. The points are also colored by their site conditions, defined by the time-averaged shear-wave velocity– VS30, showing a wide representation of soft to hard soil sites. Note that because this analysis is not oriented at a specific site with specific conditions, the only criteria for choosing time histories was to ensure that variability in site conditions and in-ground motion parameters is well represented, as shown in the GMIM histograms in Fig. 1(b)-1(f). The GMIMs used for analysis in this paper were selected so that they include both peak parameters (PGA, PGV, PGD) and duration-sensitive parameters (CAV, IA). Table 11 in Appendix 0 provides a comprehensive overview of the ground motion time-histories considered in this study. It lists their names and respective years of occurrence, the recording station where data was acquired, and the essential earthquake parameters that appear in Fig. 1(a)- 1(f).

(a) Scatter of the earthquakes’ magnitude and the epicentral distance; (b) Histogram of the PGA; (c) Histogram of the PGV; (d) Histogram of the PGD; (e) Histogram of the CAV; (f) Histogram of the IA
We note that 25 of the 123 ground motions are downloaded from the Center for Engineering Strong Motion Data repository (CESMD), and the rest from the Next-generation attenuation (NGA-West2) database, accessible via https://www.strongmotioncenter.org and https://ngawest2.berkeley.edu/, respectively. The ground motion selection in our dataset spans a wide range of intensities to ensure that our analysis covers a broad spectrum of seismic responses, enhancing the robustness and applicability of our findings to a more comprehensive range of real-world scenarios.
3.2 Frame models
The study encompasses eight distinct MRRCFs ranging in height from 5 to 45 stories (Ns = 5–45, where Ns is the number of stories). These MRRCFs were meticulously designed, following three main criteria:
(i) The gravitational ceiling load per area is 10.0 kN/m2, accounting for service loads, ceiling self-weight, and additional loads.
(ii) The effective load area is defined such that the highest modal period (the first modal period) equals:
(iii) The applied axial load does not surpass 60% of the columns’ cross-sectional capacity.
The MRRCFs are assigned with concrete material properties according to the EN1992-1-1 (2005) standard (see Table 1). The employed concrete types and their strength properties are specified in Table 1. The steel bars are given a characteristic yield strength of 500 MPa and E = 200 GPa per the EN1992-1-1 (2005) standard. The geometrical properties are provided by Table 2, which catalogs a total of 17 distinct cross-section design types, each pertaining to the beams and columns within the MRRCFs. These design types specify dimensions, concrete types, steel bar diameters, and steel bar spacing. It is worth noting that the concrete cover and steel bar diameter may exhibit variation between edge and inner columns for specific cross-sectional designs.
The inelastic dynamic response of the MRRCF members (i.e., beams and columns) is analyzed based on the material properties above while considering the stress-strain relationship of EN1992-1-1 for reinforced concrete cross-sections. The column cross-sections are subject to bending, compression, and shear. The Beam cross-sections are subject to bending and shear.
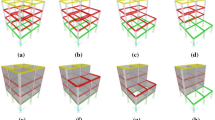
Tables 3, 4, 5, 6, 7, 8, 9 and 10 provide a comprehensive breakdown of the MRRCFs, offering insights into the number of columns, span lengths, effective load areas, and story heights. These tables also outline the assignment of cross-section types to each story within the 5, 10, 15, 20, 25, 30, 40, and 45-story MRRCFs, respectively. Figures 2, 3, 4, 5, 6, 7, 8 and 9 visually depict the modal deformations of the first three modal systems. We acknowledge that the taller MRRCFs, such as the 40 and 45-story variants, may appear unconventional within this system; however, their inclusion in this study serves the purpose of exploring a broader spectrum of system parameters, including fundamental modal periods and sizes.

Ns = 5 MRRCF modal systems of (a) T1 = 0.5 s; (b) T2 = 0.135 s; (c) T3 = 0.063 s

Ns = 10 MRRCF modal systems of (a) T1 = 1.0 s; (b) T2 = 0.316 s; (c) T3 = 0.171 s

Ns = 15 MRRCF modal systems of (a) T1 = 1.5 s; (b) T2 = 0.515 s; (c) T3 = 0.287 s

Ns = 20 MRRCF modal systems of (a) T1 = 2.0 s; (b) T2 = 0.690 s; (c) T3 = 0.397 s

Ns = 25 MRRCF modal systems of (a) T1 = 2.5 s; (b) T2 = 0.851 s; (c) T3 = 0.509 s

Ns = 30 MRRCF modal systems of (a) T1 = 3.0 s; (b) T2 = 1.085 s; (c) T3 = 0.639 s

Ns = 40 MRRCF modal systems of (a) T1 = 4.0 s; (b) T2 = 1.383 s; (c) T3 = 0.834 s

Ns = 45 MRRCF modal systems of (a) T1 = 4.5 s; (b) T2 = 1.584 s; (c) T3 = 0.922 s
3.3 Inelastic earthquake response
Inelastic earthquake response analysis is performed to assess the floor acceleration within the MRRCF systems. The earthquake response of the planar frame structures considers the inelasticity of the reinforced concrete material, and the columns’ inelastic properties stem from the interaction between the axial loading applied to the columns and the consequent yield/ultimate bending moments. These inelastic properties are according to the stress-strain relationships provided by EN1992-1-1 standard. Also, according to Table 6.5 in the ASCE/SEI 41 − 17 standard (ASCE 2017), the ratio of post-yielding to initial stiffness is considered 0.5 for all members due to the low loading level.
Numerical evaluation of the inelastic earthquake response is performed using the Newmark-β of constant average acceleration for nonlinear systems, reinforced with the Newton–Raphson method. The tangent stiffness of the planar MRRCF is calculated using the direct stiffness method. The resisting forces of the nonlinear system are analyzed by incorporating the hysteretic model behavior with degradation for deteriorating inelastic structures by Sivaselvan et al. (2000).
It is noted that the vertical axial load applied to the columns does not vary during the numerical simulation due to the over-turning moment. The inelastic properties of the beam stem from the cross-section’s pure bending capabilities. The numerical analysis employs the direct stiffness method in calculating the deformation and resistance of the frame structure. When a column fails (i.e., plastic hinges are formed at both edges), it is assumed that it can still carry axial load. Hence, the numerical simulation stops when all columns fail at a specific story or the acceleration time-history has ended.
4 Analysis results
This section presents the results of the 8 MRRCF models in section 3.2, loaded with 123 ground motion time-histories presented in section 3.1 (approximately 1,000 simulations total). Almost all of the simulations conducted for this study (98%) entered the structure’s plastic range, and some even reached collapse. Figure 10 shows the distribution of structural response in the simulations, categorized into four ‘cases’: Case A refers to structures that remained elastic throughout the simulation; Case B refers to structures in which at least one element became plastic at some point during the simulation; Case C refers to structures that collapsed (all columns at one story fail) towards the end of the simulation (after time of PGA in the acceleration time-history) and Case D refers to structures that collapsed early in the simulations (before time of PGA). The distribution in Fig. 10 shows that for the Ns = 5, 20, 25, and 30 structures, the vast majority of simulations became plastic but did not collapse, while for the Ns = 10,15, 40, and 45 structures, more than 50% of the simulations terminated at structural collapse, but most happened after the time of PGA so that the recorded structural accelerations are still assumed to be representative of maximum structural acceleration.

Earthquake response during simulations: (Case A) structure remained in the elastic range, (Case B) structure entered the plastic range, (Case C) structure collapsed posterior to PGA, (Case D) structure collapsed prior to PGA
The distribution of PFA throughout the structure height is presented in Fig. 11, in which all structures (Ns = 5 through 45) are divided into five sections: the first floor, the lower, middle, and upper thirds, and the upper floor. The results clearly show two patterns of response; while the low structures (Ns = 5 & 10) experience the maximum floor acceleration at the upper floor, the highest structures (Ns = 40 & 45) experience the maximum floor acceleration at the bottom floor, and the response of the intermediate structures is something in between. This result can be explained by the fact that the lower the structure, the more dominant the effect of the fundamental period on the total acceleration, and the higher the structure, the more dominant the effect of the shear at the base of the structure.
The distribution of PGA amplitudes for each structure is presented as error bars in Fig. 12. Note that mean and standard deviation are calculated on a log scale, hence the symmetry on the y-axis. While the mean PFA is higher for structures with shorter periods, the obtained standard deviations are about the same for all structures and are primarily dependent on the range of input motions. Hence, we conclude that there is no strong dependence between the system parameters (such as height, stiffness, and fundamental period) and the resulting PFAs.

Distribution of PFA along the height of the structure

Range of Inelastic accelerations
Next, we study the correlation between the structural inelastic accelerations and five GMIM– PGA, PGV, PGD, CAV, and IA. Our research findings unveil a strong association between the accelerations and the PGA. This relationship is exemplified through Figs. 13 and 14 for 5- and 45-story structures, respectively. These figures provide a comparative analysis of structural accelerations, represented on the y-axis, in relation to PGA and PGV, represented on the x-axis. Both structures show a high correlation with PGA, with a clear trend and small scatter, while the trend with PGV is much less distinct, and the scatter is much broader.

Scatter of inelastic acceleration and (a) PGA; (b) PGV; of a 5-story building

Scatter of inelastic acceleration and (a) PGA; (b) PGV; of a 45-story building
Figures 15 and 16 show the correlation coefficients between the buildings’ accelerations and five different GMIMs for the relative and the total inelastic accelerations, respectively. In order to avoid assuming that the dependence between the accelerations and the GMIM is linear, in addition to calculating the correlation coefficients according to Pearson, the correlation coefficients were also calculated according to Spearman. These figures show that the correlation between the structural acceleration and PGA is above 0.9 in all cases, followed by IA, then CAV, and only then PGV and PGD. They also show that except for PGA, the correlation coefficient using Spearman (indicated by circles) is always higher than that with Pearson (marked by squares), suggesting that the correlation is not entirely linear.

Correlation coefficients between relative inelastic accelerations and GMIM

Correlation coefficients between total inelastic accelerations and GMIM
5 Suggested model
We suggest a simple parametric model, calculating the total structural acceleration as a function of the structural fundamental period and the PGA. The proposed functional form is as follows:
Where the PGA units are in g, and the parameters a and b depend on the fundamental period of the structure, mp, using the following terms:
Equations (7) and (8) relationship with the modal period is depicted in Fig. 17.

Parameters a and b versus modal period
The model was developed in two stages to ensure smooth continuous expressions for a and b, as seen in Fig. 17, a0 and b0 are the original coefficients obtained by fitting Eq. (6) with the simulation results, where atot is the maximum acceleration obtained from each simulation. a1 is a smooth approximation of parameter a0, and describes the trend of a0, and b1 is the approximation of parameter b0, obtained from solving Eq. (6), with a fixed as a1. It is worth noting that Eqs. (7) and (8) represent a1 and b1 through smooth functions, respectively.
Figure 18(a) and 18(b) compare the accelerations obtained from the analyses with those calculated using the equation proposed in this study for the 5 and 45-story buildings, respectively. The corresponding R-squared values for these structures are 0.856 and 0.907, respectively. With these values, the equations proposed in this study become valuable tools for estimating floor accelerations in MRRCF to protect NSCs.

Total accelerations for a: (a) 5-story building; (b) 45-story building
6 Summary and discussion
The primary objectives of this comprehensive study were to ascertain which parameter has the most substantial effect on the structure’s total accelerations during earthquakes and propose a simple parametric model for evaluating the maximum total inelastic acceleration of MRRCF systems. The model is expected to improve the risk assessment of acceleration-sensitive NSCs within MRRCF structures. The data in this paper results from 948 simulations of the eight MRRCFs, with the structure’s fundamental period ranging from 0.5 s to 4.5 s, under 123 ground motion time-histories.
While the analysis is believed to be robust and provide significant insight, we recognize a number of limitations which should be acknowledged:
-
(i)
The analysis is performed in plane strain rather than a full 3D framework. However, we expect the results to be applicable to ordinary three-dimensional structures.
-
(ii)
The current procedure considers only frame structures, despite those being very rare for > 20 stories. However, we prefer to constrain the analysis to one structural type only, at the cost of analyzing slightly non-realistic examples for the higher structures. Also, extending the analysis to 45 stories allows for a more robust estimation at the intermediate heights constrained by higher and lower structures.
-
(iii)
Vertical ground motions are not considered in the analysis, which is performed in 2D. This simplification is done for two main reasons: (1) in the typical structural analysis focused on structural performance, it is shown that vertical ground motions do not affect ordinary structures but are more significant in the case of longitudinal structures such as bridges. (2) While V/H ratios have been shown to exceed 1.0 at short periods and short source-to-site distances (e.g., Bozorgnia and Campbell 1995, Bradley and Coubrinovski 2011), they typically remain at approximately V/H = 0.5 elsewhere. Hence, this analysis did not consider vertical ground motions, which are not particularly designed for near-field structures. However, we recognize that significant vertical motions can affect the performance of NSCs and plan to explore that further in future analyses.
The correlation between maximum structural acceleration and several other parameters is quantified using both Pearson and Spearman correlation coefficients. Among the factors analyzed, including fundamental periods, PGA, PGV, PGD, CAV, and IA, it is evident that PGA is the GMIM with the highest correlation to peak total acceleration during earthquakes. We observe that the PFA is primarily observed on high floors in low structures and on low floors in taller structures. Furthermore, a negative correlation exists between PFA and the fundamental period, where longer fundamental periods are suitable with small PFA. The latter correlation will be further elaborated and studied in future research since there seems to be a connection that could be presented through the frequency domain.
Based on these findings, an equation was formulated to determine the total inelastic structural acceleration as a function of both PGA and the fundamental periods of the structure. This development deepens our comprehension of seismic response, aids in structural design considerations, and facilitates risk assessment, ultimately contributing to creating safer built environments.
Data availability
The datasets generated during and analyzed during the current study are available from the corresponding author upon reasonable request.
References
ASCE (2017) American Society of Civil Engineers. Seismic Rehabilitation of Existing Buildings, ASCE/SEI 41– 06
ASCE (2000) American Society of Civil Engineers, Prestandard and Commentary for the Seismic Rehabilitation of Building, FEMA 356
Baker JW (2007) Measuring bias in structural response caused by ground motion scaling. Pac Conf Earthq Eng 1–6. https://doi.org/10.1002/eqe
Bozorgnia Y, Niazi M, Campbell KW (1995) Characteristics of Free-Field Vertical Ground Motion during the Northridge Earthquake. Earthq Spectra 11:515–525. https://doi.org/10.1193/1.1585825
Bradley BA, Cubrinovski M (2011) Near-source strong ground motions observed in the 22 February 2011 Christchurch earthquake. Seismol Res Lett 82:853–865. https://doi.org/10.1785/gssrl.82.6.853
Elenas A, Meskouris K (2001) Correlation study between seismic acceleration parameters and damage indices of structures. Eng Struct 23:698–704. https://doi.org/10.1016/S0141-0296(00)00074-2
EN1992-1-1 (2005) Eurocode 2: design of concrete structures: general rules and rules for buildings. Br Stand Inst 668:225
Fathali S, Lizundia B (2011) Evaluation of current seismic design equations for nonstructural components in tall buildings using strong motion records. Struct Des Tall Spec Build 20:30–46. https://doi.org/10.1002/tal.736
Kim SC, White DW (2004) Nonlinear analysis of a one-story low-rise masonry building with a flexible diaphragm subjected to seismic excitation. Eng Struct 26:2053–2067. https://doi.org/10.1016/j.engstruct.2004.06.008
NIST (2018) National Institute of Standards and Technology, recommendations for improved seismic performance of nonstructural components. NIST GCR 18–917
Reinoso E, Miranda E (2005) Estimation of floor acceleration demands in high-rise buildings during earthquakes. Struct Des Tall Spec Build 14:107–130. https://doi.org/10.1002/tal.272
Sivaselvan MV, Reinhorn AM (2000) Hysteretic models for deteriorating inelastic structures. J Eng Mech 126:633–640
Taghavi S, Miranda E (2003) Response Assessment of Nonstructural Response Assessment of Nonstructural. Pacific Earthquake Engineering Research Center
Taghavi S, Miranda E (2004) Estimation of seismic acceleration demands in Building Components, 13 edn. World Conf Earthq Eng Vancouver, BC. Canada 3199
Wang T, Shang Q, Li J (2021) Seismic force demands on acceleration-sensitive nonstructural components: a state-of-the-art review. Earthq Eng Eng Vib 20:39–62. https://doi.org/10.1007/s11803-021-2004-0
Funding
The authors declare that no funds, grants, or other support were received during the preparation of this manuscript.
Open access funding provided by Ben-Gurion University.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Parizat Shir, Shmerling Assaf, and Kamai Ronnie performed material preparation, data collection, and analysis. Parizat Shir wrote the first draft of the manuscript, and all authors commented on previous versions. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The 123 ground motion time-histories parameters employed in this research are specified in the table below. The ensemble consists of broad parametric samples and a range in terms of Magnitude (Mag.), PGA, PGV, PGD, CAN, and Ariar Inetnsity (IA) (Appendix Table 11).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Parizat, S., Kamai, R. & Shmerling, A. Correlating the seismic acceleration of reinforced concrete moment-resisting-frames with structural and earthquake characteristics. Bull Earthquake Eng (2024). https://doi.org/10.1007/s10518-024-01950-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10518-024-01950-9