
Abstract
A frequency accuracy study is presented for the isogeometric free vibration analysis of Mindlin–Reissner plates using reduced integration and quadratic splines, which reveals an interesting coarse mesh superconvergence. Firstly, the frequency error estimates for isogeometric discretization of Mindlin–Reissner plates with quadratic splines are rationally derived, where the degeneration to Timoshenko beams is discussed as well. Subsequently, in accordance with these frequency error measures, the shear locking issue corresponding to the full integration isogeometric formulation is elaborated with respect to the frequency accuracy deterioration. On the other hand, the locking-free characteristic for the isogeometric formulation with uniform reduced integration is illustrated by its superior frequency accuracy. Meanwhile, it is found that a frequency superconvergence of sixth order accuracy arises for coarse meshes when the reduced integration is employed for the isogeometric free vibration analysis of shear deformable beams and plates, in comparison with the ultimate fourth order accuracy as the meshes are progressively refined. Furthermore, the mesh size threshold for the coarse mesh superconvergence is provided as well. The proposed theoretical results are consistently proved by numerical experiments.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Mindlin–Reissner plates accommodate shear deformation and have been widely used in structural analysis and design [1,2,3]. A typical numerical issue for such types of structures is shear locking, which is due to the mismatched interpolations between deflectional and rotational fields [1]. Among various techniques to alleviate or remove shear locking, the reduced or selective reduced integration methods have been frequently used owing to their simplicity in numerical implementation [1, 4, 5]. During recent years, the rapidly growing isogeometric analysis [6,7,8,9,10,11,12,13] stimulates the geometrically exact analysis of Mindlin–Reissner plates and their one-dimensional degeneration, i.e., Timoshenko beams. In the context of isogeometric Mindlin–Reissner plate analysis, the shear locking issue has often been resolved by employing higher-order basis functions [14, 15], collocation formulation [16, 17], reduced and selective reduced integration [18, 19], mixed formulation [20], etc.
Regarding the isogeometric vibration analysis of shear deformable beams and plates, Thai et al. [21] presented a static, free vibration, and buckling analysis of laminated composite Mindlin–Reissner plates through modifying the shear material matrix to alleviate shear locking. A free vibration analysis of straight and curved Timoshenko beams using the isogeometric approach was conducted by Lee and Park [22] and Luu et al. [23], where higher-order basis functions are used to overcome the shear locking problem. Zhao et al. [24] presented an isogeometric free vibration analysis of Mindlin–Reissner plates using non-conforming multi-patches. Shafei et al. [25] performed a geometrically nonlinear isogeometric vibration analysis of anisotropic composite beams using the third-order shear deformation theory. Based upon Mindlin plate theory, Chen et al. [26] derived a set of higher-order equations for the vibration analysis of circular and annular plates. Recently, Huang et al. [27] illustrated a collocation analysis of the static, free vibration, and buckling responses of laminated composite plates based upon the isogeometric-meshfree coupling framework proposed by Wang and Zhang [28, 29], among others. However, it is noted that these studies mainly focused on the numerical performance of isogeometric vibration analysis of Timoshenko beams and Mindlin–Reissner plates, and there still lacks a detailed theoretical investigation for the influence of shear locking on the frequency accuracy.
In this work, a theoretical study is presented for the isogeometric free vibration analysis of Mindlin–Reissner plates with particular reference to the reduced integration and quadratic splines. Due to the smooth property of isogeometric basis functions, unlike the quadratic finite elements with the rank deficiency problem in case of reduced integration [1], the quadratic isogeometric stiffness matrices of Mindlin–Reissner plates using an elemental 2 × 2 Gaussian quadrature rule actually maintain the full rank when two or more elements are used. Accordingly, this 2 × 2 reduced Gaussian quadrature rule is uniformly adopted to integrate the stiffness and mass matrices herein, which are compared to the full integration with a 3 × 3 Gaussian quadrature rule per element. In order to elaborate the shear locking issue, the frequency error measures are systematically attained for the isogeometric formulation using both full and reduced integration techniques. These frequency error estimates clearly indicate the shear locking tendency for the isogeometric formulation with full integration. On the other hand, the shear locking issue is removed by the isogeometric formulation with reduced integration, where the frequency error coefficient reasonably converges to a finite constant in case of the thin plate limit. Besides, the isogeometric frequency accuracy of Timoshenko beams is also elucidated. It is further proved that the isogeometric frequency for the reduced integration approach exhibits a supercovergence of sixth order accuracy for coarse meshes, in contrast to the ultimate fourth order accuracy when the meshes are progressively refined. Meanwhile, the mesh size threshold for this coarse mesh superconvergence is derived.
The remainder of this paper is organized as follows. The basic equations for isogeometric free vibration analysis of Mindlin–Reissner plates are discussed in Sect. 2. In Sect. 3, the frequency accuracy measures for the isogeometric formulation with full integration are presented to disclose the shear locking problem. Subsequently, the frequency error measures for the isogeometric formulation with reduced integration are attained in Sect. 4, where the locking-free property and coarse mesh superconvergence are particularly investigated. The theoretical results are testified by numerical examples in Sect. 5. Finally, conclusions are drawn in Sect. 6.
2 Isogeometric Free Vibration Analysis of Mindlin–Reissner Plates
2.1 Basic Equations
Consider a Mindlin–Reissner plate with \(\Omega\) and thickness \(\tau\), the \(xy\)-plane of Cartesian coordinate system is set to be coincident with the mid-surface of the plate. The primary variables at a generic point \({\user2{x}} = (x,y) \in \Omega\) are the deflection \(w\left( {{\varvec{x}},t} \right)\), and the two rotations \(\beta_{x} \left( {{\varvec{x}},t} \right)\) and \(\beta_{y} \left( {{\varvec{x}},t} \right)\). Based upon these primary variables, the rotational vector \({\varvec{\beta}}\left( {{\varvec{x}},t} \right)\), curvature vector \({\varvec{\kappa}}\left( {{\varvec{x}},t} \right)\), and shear strain vector \({\varvec{\gamma}}\left( {{\varvec{x}},t} \right)\) can be, respectively, defined as:
where \(t\) stands for time, the subscript comma implies a partial differentiation with respect to the corresponding spatial coordinate.
For an isotropic linear elastic Mindlin–Reissner plate, the equations of motion without external forces read [30]:
where \(D = E\tau^{3} /[12(1 - \nu^{2} )]\) is the bending rigidity coefficient, \(G = E/[2(1 + \nu )]\) is the shear modulus, \(E\) is Young’s modulus, \(\nu\) is Poisson’s ratio, \(\rho\) is the material density, \(I = \tau^{3} /12\) represents the moment of inertia, and \(k_{s}\) denotes the shear correction factor that is taken as \(k_{s} = 5/6\) in the subsequent study. The weak form corresponding to Eq. (4) reads:
in which \({\user2{D}}^{b}\) and \({\user2{D}}^{s}\) are the standard bending and shear elasticity matrices:
In accordance with the harmonic wave assumption, \(w\), \(\beta_{x}\) and \(\beta_{y}\) can be expressed as [30]:
where \(\tilde{w}\), \(\tilde{\beta }_{x}\) and \(\tilde{\beta }_{y}\) are the deflectional and rotational wave amplitudes, \(k_{x}\) and \(k_{y}\) represent the wave numbers in the x- and y-direction, respectively. Substituting Eq. (7) into Eq. (4) yields the following continuum frequencies:
with
where \(k^{2} = k_{x}^{2} + k_{y}^{2}\). \(\omega^{b}\), \(\omega^{s}\) and \(\omega^{t}\) are the frequencies corresponding to bending, shear and twist deformations, respectively. Form Eq. (8), we usually have \(\omega^{b} < \omega^{t} < \omega^{s}\), i.e., \(\omega^{s}\) and \(\omega^{t}\), are much larger than \(\omega^{b}\) unless for very thick plates.
Through drop** the terms related to the y-direction and replacing \(D\) and \(\tau\) with \({{EI}}\) and \(A\) in Eqs. (4) and (8), respectively, we can extract the equations of motion and continuum frequencies for Timoshenko beams:
with
where \(A\) is the area of beam cross section.
2.2 Quadratic Isogeometric Basis Functions
B-spline and non-uniform rational B-splines (NURBS) basis functions are frequently used in isogeometric analysis. B-spline basis functions are constructed based upon the knot vector \({\user2{k}}_{\xi }\) defined in the parametric domain \(\xi \in \Omega_{\xi } = [0,1]\):
where \(n\) is the number of basis functions, \(p\) is the basis order, and \(\xi_{a} \in {\mathbb{R}}\) denotes the ath knot. In practice, the open knot vector whose first and last knot values repeat \((p + 1)\) times is often utilized. With the aid of the knot vector \({\user2{k}}_{\xi }\), B-spline basis functions \(N_{a}^{[p]} (\xi )\) can be uniquely determined by the Cox-de Boor formula [6]:
where \(\xi \in \Omega_{\xi } = [0,1]\) is the parametric coordinate. In this work, the quadratic B-spline basis functions are particularly considered. For convenience of subsequent development, according to Eqs. (14) and (15), the explicit quadratic B-spline basis functions associated with a generic interior knot \(\xi_{a}\) are provided as follows [31]:
where for brevity, the superscript denoting basis degree is dropped, \(h_{\xi }\) represents the distance or element length between neighboring knots in the parameter space, i.e., \(\xi_{a + i} = \xi_{a} + ih_{\xi }\).
Multi-dimensional B-spline basis functions can be conveniently formulated by the tensor product rule, i.e., the two-dimensional B-spline basis function \(N_{A}^{[p]} \left( {\varvec{\xi}} \right)\) is given by:
where for brevity, the double subscripts \(a\) and \(b\) are condensed as a single subscript \(A\). Furthermore, an inclusion of the geometry-related weights \(\varpi_{A}\)’s into the B-spline basis functions then yields the corresponding NURBS basis function \(R_{A}^{[p]} \left( {\varvec{\xi}} \right)\):
where \({\mathcal{N}}\) denotes the total number of basis functions as well as the number of control points. A comparison of Eqs. (17) and (18) together with the partition of unity property indicates that B-spline and NURBS basis functions are identical for unit weights.
2.3 Discrete Isogeometric Formulation
Introducing the isoparametric representations for the plate mid-surface and the deflectional and rotational variables, we have:
where \(w_{A}\), \(\beta_{xA}\) and \(\beta_{yA}\) are the unknown deflectional and rotational coefficients associated with the Ath control point \({\user2{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{x} }}_{A}\).
Substituting Eqs. (19) and (20) into Eq. (5) leads to the following discrete isogeometric formulation for the free vibration analysis of Mindlin–Reissner plates:
where \({\varvec{d}} = \{ w_{1} \, \beta_{x1} \, \beta_{y1} \cdots w_{\mathcal{N}} \, \beta_{{x\mathcal{N}}} \, \beta_{{y\mathcal{N}}} \}^{\rm T}\) is the global displacement coefficient vector, \({\varvec{M}}\) and \({\varvec{K}}\) are the global mass and stiffness matrices, respectively. Further invoking a harmonic wave assumption for the displacement coefficient vector \({\varvec{d}}(t)\), i.e., \({\varvec{d}}(t) = {\varvec{\phi}}{\text{e}}^{{( - \iota \omega^{h} t)}}\), we then obtain the following generalized eigenvalue problem for the free vibration analysis of Mindlin–Reissner plates:
where \(\omega^{h}\) is the semi-discrete frequency, and \({\varvec{\phi}}\) is the vector that contains the displacement coefficients corresponding to a vibration mode.
For convenience of development, the mass and stiffness matrices \({\varvec{M}}\) and \({\varvec{K}}\) are decomposed into the bending and shear contributions:
Meanwhile, the entries for various mass and stiffness matrices are defined as:
with
In numerical implementation, the above mass and stiffness matrices \({\varvec{M}}\) and \({\varvec{K}}\) can actually be conveniently formulated through assembling their elemental counterparts \({\user2{M}}^{e}\) and \({\user2{K}}^{e}\), respectively.
In case of Timoshenko beams, the entries of mass and stiffness matrices have similar forms to those in Eq. (24) and (25) through replacing \(\rho \tau\), \({\varvec{D}}^{b}\) and \({\varvec{D}}^{s}\) by \(\rho A\), \({{EI}}\) and \(k_{s} {{GA}}\), respectively, and accordingly, Eqs. (26) and (27) become:
3 Accuracy Deterioration for Isogeometric Frequency Analysis with Full Integration
The mass and stiffness matrices in the previous section are computed via numerical integration, for instance, the Gaussian quadrature rules. Since the quadratic splines are particularly considered in this study, the three-point Gaussian rule with integration points of \(\left\{ { - \sqrt {3/5} ,0, \, \sqrt {3/5} } \right\}\) and weights of \(\{ 5/9,\,8/9,{ 5/9}\}\) per direction is sufficient to exactly integrate the mass and stiffness matrices in case of uniform discretization, and is thus referred to as full integration. For convenience, the isogeometric analysis with full integration is abbreviated as IGA-FI in the subsequent discussions.
For convenience of the subsequent analytical study, the plate element mass and stiffness matrices for IGA-FI under uniform discretization are, respectively, attained as follows:
where the sub-matrices in Eqs. (30) and (31) are given in Appendix A.1.
Similar to Eq. (7), a harmonic representation of the deflectional and rotational coefficients associated with the control point \(\user2{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{x} }_{A} = \user2{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{x} }_{ab} = (x_{a} ,y_{b} )\) gives:
Substituting Eq. (32) into Eq. (21) along with the mass and stiffness matrices in Eqs. (30) and (31) yields:
where
The coefficients \(\mathcal{K}_{IJ}\) and \(\mathcal{M}_{II}\) in Eq. (34) are:
in which \(\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{c}_{i}\), \(\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{s}_{i}\), \(\mathcal{H}_{IJ}^{[i]}\)’s and \(\mathcal{T}_{II}^{[i]}\)’s are detailed in Appendix A.2.
The determinant vanishing condition for the coefficient matrix of Eq. (33) gives the following characteristic equation [31]:
with
To simplify the subsequent analytical study, we further introduce the following frequency error measures [1, 31]:
where \(\omega\) represents the continuum frequency, \(\varphi = \omega^{2}\) and \(\varphi^{h} = (\omega^{h} )^{2}\). It is noted that by the definitions of Eq. (39) we have \(e_{\varphi } \approx 2e_{\omega }\) and \(\varphi^{h} = (\omega^{h} )^{2} = (1 + e_{\varphi } )\varphi\). Based upon these relationships, Eq. (37) reduces to:
where the higher-order terms of \(e_{\varphi }\) can be rationally dropped [31]. Thus, the frequency error is attained from Eq. (40) as:
It is noted that a direct evaluation of \(\omega^{h}\) is not trivial, while the focus here is the frequency error estimation, thus by the relationship of Eq. (39), Eq. (37) is transformed into the frequency error expression of Eq. (41), which serves as a basis for the subsequent frequency accuracy study.
Subsequently, through plugging the continuum frequencies \(\omega^{b}\), \(\omega^{s}\) and \(\omega^{t}\) of Eq. (8) into Eq. (41), and after a lengthy but straightforward derivation by performing the standard Taylor expansion [31,32,33], the following frequency error estimates are, respectively, obtained for the bending, shear and twist modes corresponding to IGA-FI:
with
where \(\nu_{ \pm n}^{m} \triangleq m\nu \pm n\), \(\theta\) is the wave propagation angle and we have \(k_{x} = k\cos \theta\) and \(k_{y} = k\sin \theta\). The parameters \(\tilde{a}\), \(\tilde{b}\), \(\tilde{c}\) and \(\tilde{d}\) are given by:
It is apparent that Eqs. (42)–(44) state that IGA-FI is fourth order accurate in terms of frequency computation. It is noted that the coefficients of \(\mathcal{C}_{4}^{{b,{\text{FI}}}}\), \(\mathcal{C}_{4}^{{s,{\text{FI}}}}\) and \(\mathcal{C}_{4}^{{t,{\text{FI}}}}\) for Mindlin–Reissner plates only depend on the plate thickness \(\tau\), Poisson’s ratio \(\nu\) and the wave propagation angle \(\theta\), and these coefficients can be further recast as:
where \(\tilde{\mathbb{A}}\), \(\tilde{\alpha }\), \(\tilde{\beta }\), \(\tilde{\chi }\) and \(\tilde{\delta }\) are defined as:
If the plate thickness goes to its thin limit, i.e., \(\tau \to 0\), Eqs. (55)–(59) give:
Accordingly, substituting Eq. (60) into Eqs. (52)–(54) yields:
Equation (61) states that \(\mathcal{C}_{4}^{{b,{\text{FI}}}}\) becomes unbounded as \(\tau \to 0\), which clearly illustrates that the shear locking of IGA-FI leads to a noticeable frequency accuracy deterioration regarding bending modes. In the meantime, Eq. (61) implies that \(\tau \to 0\) has no obvious influence on the frequency accuracy related to shear and twist modes. It is noted that usually the lower frequencies, say, the frequencies corresponding to the bending modes, are much more important in structural engineering practice. Consequently, we particularly concentrate on the frequency accuracy regarding bending modes in the subsequent development.
In case of Timoshenko beam problems, the frequency error measures of IGA-FI for bending and shear modes have the same expressions as Eqs. (42) and (43) with the coefficients \(\mathcal{C}_{4}^{{b,{\text{FI}}}}\) and \(\mathcal{C}_{4}^{{s,{\text{FI}}}}\) given by Eqs. (45) and (46), respectively, while the parameters \(\tilde{a}\), \(\tilde{b}\), \(\tilde{c}\) and \(\tilde{d}\) can be obtained by invoking \(\nu = 0\) and \(\theta = 0\), and replacing \(D\) and \(\tau\), respectively, with \(EI\) and \(A\) in Eqs. (48)–(51):
It is clear that a fourth order accuracy can be attained for Timoshenko beam with IGA-FI. Further simplify the coefficients of \(\mathcal{C}_{4}^{{b,{\text{FI}}}}\) and \(\mathcal{C}_{4}^{{s,{\text{FI}}}}\) same as Eqs. (52) and (53) where the parameters \(\tilde{\mathbb{A}}\), \(\tilde{\alpha }\), \(\tilde{\beta }\), \(\tilde{\chi }\) and \(\tilde{\delta }\) in this case are given by:
Similar to Mindlin–Reissner plates, if the thickness of Timoshenko beam takes its thin limit, i.e., \(\tau \to 0\), Eqs. (66)–(70) reduce to:
Consequently, accordingly Eq. (71) gives:
Equation (72) well explains the shear locking of IGA-FI regarding frequency accuracy deterioration for Timoshenko beams.
4 Coarse Mesh Superconvergence for Isogeometric Frequency Analysis with Reduced Integration
4.1 Frequency Error Measure and Locking-Free Characteristic
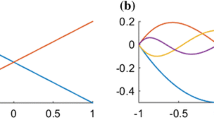
In this section, the reduced integration is used to resolve the shear locking issue, i.e., the two-point Gaussian rule with points of \(\left\{ { - \sqrt {1/3} , \, \sqrt {1/3} } \right\}\) and weights of \(\{ 1,\;1\}\) per direction are employed to formulate the mass and stiffness matrices. In contrast to IGA-FI, IGA-RI is used to represent the isogeometric analysis with reduced integration. Similar to the reduced integration stiffness matrix for the quadratic Lagrangian Mindlin–Reissner plate element [1], the element stiffness matrix of IGA-RI also has four spurious modes. However, due to the smooth nature of isogeometric basis functions, the reduced integration technique actually maintains the full rank of global stiffness matrix when two or more elements are used for isogeometric discretization. This fact is illustrated in Fig. 1, where there are only three desirable rigid body modes and no superior zero energy modes for the stiffness matrix assembled by four elements with IGA-RI.

The first four eigenmodes of the plate stiffness matrix for IGA-RI
Based upon the 2 × 2 reduced Gauss integration, the isogeometric element mass and stiffness matrices read:
where the sub-matrices in Eqs. (73) and (74) are provided in Appendix B.1. Bringing Eqs. (73) and (74) into Eq. (21) together with the harmonic representations of deflection and rotations leads to the stencil equations for IGA-RI, which have identical forms to Eqs. (33)–(35), but with the following parameter definitions:
where \(\overline{\mathcal{H}}_{IJ}^{[i]}\)’s and \(\overline{\mathcal{T}}_{II}^{[i]}\)’s are described in Appendix B.2.
Following a similar procedure as the previous section, with the aid of Eqs. (73)–(75), the corresponding frequency error measures for IGA-RI are obtained as:
where \(\mathcal{C}_{4}^{{b,{\text{RI}}}}\), \(\mathcal{C}_{4}^{{s,{\text{RI}}}}\) and \(\mathcal{C}_{4}^{{t,{\text{RI}}}}\) are given by:
where
It is noted that \(\tilde{a}^{ + }\) and \(\tilde{d}\) are defined in Eqs. (48) and (51), respectively.
Equations (76)–(78) imply that the frequency convergence rate of IGA-RI is also 4, which is the same as that of IGA-FI. But different from IGA-FI, IGA-RI shows a desirable locking-free characteristic. To show this fact, the coefficient of \({\mathcal{C}}_{4}^{b,{\text{RI}}}\) in Eq. (79) can be rewritten as:
with
In the thin plate limit, i.e., \(\tau \to 0\), the coefficient of \(\mathcal{C}_{4}^{{b,{\text{RI}}}}\) in Eq. (84) reduces to:
Therefore, the dominated frequency error coefficient \(\mathcal{C}_{4}^{{b,{\text{RI}}}}\) for the bending modes converges to a constant in the thin plate limit, which obviously proves that the shear locking issue with unbounded frequency error in IGA-FI is successfully overcome by IGA-RI.
For Timoshenko beam problems, the frequency errors of IGA-RI take the same forms as Eqs. (76) and (77). Furthermore, letting \(\theta = 0\) in Eq. (87) yields the frequency error coefficient \(\mathcal{C}_{4}^{{b,{\text{RI}}}}\) when a Timoshenko beam approaches its thin limit:
Apparently, Eq. (88) says that IGA-RI is locking-free for the frequency analysis of Timoshenko beams.
4.2 Coarse Mesh Superconvergence
To unveil the coarse mesh superconvergence regarding the bending frequency computation of Mindlin–Reissner plates and Timoshenko beams, the sixth order error term is also included into Eq. (76):
where \(\mathcal{C}_{6}^{{b,{\text{RI}}}}\) is given by:
For Mindlin–Reissner plates, \(\overline{b}_{6}\) and \(\overline{c}_{6}\) in Eq. (90) read:
in which \(\alpha = \nu_{ - 1}^{1} Dk_{s} GI + 2k_{s}^{2} G^{2} I^{2}\). Under the circumstance of Timoshenko beams, \(\overline{b}_{6}\) and \(\overline{c}_{6}\) in Eq. (90) become:
From Eq. (89), it is evident that IGA-RI is fourth order accurate. However, it is interesting to note that if \(\left| {\mathcal{C}_{4}^{{b,{\text{RI}}}} k^{4} h^{4} } \right| < \left| {\mathcal{C}_{6}^{{b,{\text{RI}}}} k^{6} h^{6} } \right|\), a sixth order accuracy may be achieved. Along this path, the condition for this accuracy order elevation can be easily found as:
where \(\hbar\) is the coarse mesh threshold given by:
Under the condition of Eq. (95), which means for relatively coarse meshes, the frequency accuracy for bending modes is controlled by the sixth order error term, and the accuracy order is improved from 4 to 6, and thus it is named as the coarse mesh superconvergence. It is noted that the employment of coarse meshes with improved accuracy also implies higher computational efficiency.
5 Numerical Demonstration
5.1 Vibration of Timoshenko Beam
The first example is the free vibration analysis of a simply supported Timoshenko beam. Without loss of generality, dimensionless geometric and material parameters are employed for convenience. The geometric and material properties for the Timoshenko beam are: length \(L = 10\), cross-sectional width \(b = 1\), thickness \(\tau = 0.2\), material density \(\rho = 1\), Young’s modulus \(E = 10^{6}\), and Poisson’s ratio \(\nu = 0.3\).
During isogeometric computation, 8, 12, 16, 24, 32, 48, 64 and 128 quadratic elements are used to evaluate the convergence. The results for the first four frequencies are presented in Fig. 2, which show that much higher accuracy is obtained by the locking-free IGA-RI in comparison with the IGA-FI with shear locking. Meanwhile, for coarse meshes with \(h > \hbar\), where \(\hbar\) is obtained according to Eq. (96), the convergence rate reaches 6 for IGA-RI, two orders higher than its ultimate convergence rate of 4. These results perfectly verify the theoretical convergence rates and the coarse mesh superconvergence.

Frequency convergence comparison for the Timoshenko beam problem
5.2 Vibration of Rectangular Mindlin–Reissner Plate
Consider a simply supported rectangular plate with length \(L_{x} = 2\), width \(L_{y} = 1\), and thickness \(\tau = 0.02\). The material parameters are: Young’s modulus \(E = 10^{3}\) and Poisson’s ratio \(\nu = 0.3\). Eight progressively refined meshes with 16 × 8, 24 × 12, 32 × 16, 40 × 20, 60 × 30, 80 × 40, 120 × 60 and 160 × 80 elements are used for convergence study. The convergence comparison of the first four frequencies is illustrated in Fig. 3. It is evident that similar to the previous beam problem, although their final convergence rates for both IGA-RI and IGA-FI are 4, IGA-RI outperforms IGA-FI in terms of frequency accuracy because the shear locking problem in IGA-FI is successfully removed by IGA-RI, and in particular, the superconvergence rate of 6 is attained for IGA-RI with coarse meshes defined by \(h > \hbar\).

Frequency convergence comparison for the rectangular Mindlin–Reissner plate problem
5.3 Vibration of Circular Mindlin–Reissner Plate
The last example is a clamped circular plate whose geometric and material properties are: radius \(r = 0.5\), thickness \(\tau = 0.02\), Young’s modulus \(E = 10^{3}\) and Poisson’s ratio \(\nu = 0.3\). The geometrically exact quadratic isogeometric meshes in Fig. 4 are adopted for the frequency computation, and the convergence results of the first four frequencies are presented in Fig. 5. These results reveal that for this circular plate problem with non-uniform meshes, both IGA-FI and IGA-RI yield a convergence rate of 4 as the meshes are continuously refined, but in contrast to IGA-FI, much more superior frequency accuracy is attained by IGA-RI. Moreover, the theoretically expected sixth order superconvergence of IGA-RI is again observed for various frequencies with relatively coarse meshes, which is very desirable for practical structural vibration analysis.

Isogeometric meshes for the circular Mindlin–Reissner plate problem

Frequency convergence comparison for the circular Mindlin–Reissner plate problem
6 Conclusions
A systematic frequency accuracy study was presented for the isogeomtric free vibration analysis of Mindlin–Reissner plates and Timoshenko beams using quadratic splines. The frequency error measures were obtained for the isogeometric formulation using 3 × 3 full integration and 2 × 2 reduced integration rules. It was theoretically shown that as the plate or beam thickness takes its thin limit, the control coefficient of the bending frequency error measure becomes unbounded for the isogeometric formulation with full integration, which is a direct consequence of the shear locking problem. On the other hand, the bending frequency error expression for the isogeometric formulation with reduced integration evinces a desirable locking-free characteristic. Furthermore, it was found that for relatively coarse meshes, the frequency results produced by the isogeometric formulation with reduced integration exhibits a coarse mesh superconvergence, i.e., the convergence rate reaches 6 for coarse meshes, which is two orders higher than the ultimate convergence rate of 4 as the meshes are progressively refined. These theoretical findings were thoroughly verified by numerical results.
Data availability
The data used in this study are included in this article.
References
Hughes TJR. The finite element method: linear static and dynamic finite element analysis. New York: Dover; 2000.
Wang CM, Reddy JN, Lee KH. Shear deformable beams and plates: relationships with classical solutions. Amsterdam: Elsevier; 2000.
Wu R, Wang W, Chen G, Du J, Ma T, Wang J. Frequency-temperature analysis of thickness-shear vibrations of SC-cut quartz crystal plates with the first-order Mindlin plate equations. Acta Mech Solida Sin. 2021;34:516–26.
Zienkiewicz OC, Taylor RL, Too J. Reduced integration technique in general analysis of plates and shells. Int J Numer Meth Eng. 1971;3(2):275–90.
Hughes TJR, Cohen M, Haroun M. Reduced and selective integration techniques in the finite element analysis of plates. Nucl Eng Des. 1978;46(1):203–22.
Hughes TJR, Cottrell JA, Bazilevs Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput Methods Appl Mech Eng. 2005;194:4135–95.
Cottrell JA, Reali A, Bazilevs Y, Hughes TJR. Isogeometric analysis of structural vibrations. Comput Methods Appl Mech Eng. 2006;195:5257–96.
Wang D, Liu W, Zhang H. Novel higher order mass matrices for isogeometric structural vibration analysis. Comput Methods Appl Mech Eng. 2013;260:92–108.
Wang D, Liu W, Zhang H. Superconvergent isogeometric free vibration analysis of Euler–Bernoulli beams and Kirchhoff plates with new higher order mass matrices. Comput Methods Appl Mech Eng. 2015;286:230–67.
Lin G, Li P, Liu J, Zhang P. Transient heat conduction analysis using the NURBS-enhanced scaled boundary finite element method and modified precise integration method. Acta Mech Solida Sin. 2017;30:445–64.
Guo Y, Do H, Ruess M. Isogeometric stability analysis of thin shells: from simple geometries to engineering models. Int J Numer Meth Eng. 2019;118(8):433–58.
Xu X, Wang D, Li X, Hou S, Zhang J. A superconvergent isogeometric method with refined quadrature for buckling analysis of thin beams and plates. Int J Struct Stab Dyn. 2021;21(11):2150153.
**a Y, Wang H, Zheng G, Shen G, Hu P. Discontinuous Galerkin isogeometric analysis with peridynamic model for crack simulation of shell structure. Comput Methods Appl Mech Eng. 2022;398: 115193.
Benson DJ, Bazilevs Y, Hsu MC, Hughes TJR. Isogeometric shell analysis: the Reissner–Mindlin shell. Comput Methods Appl Mech Eng. 2010;199:276–89.
Zou Z, Hughes TJR, Scott MA, Sauer RA, Savitha EJ. Galerkin formulations of isogeometric shell analysis: alleviating locking with Greville quadratures and higher-order elements. Comput Methods Appl Mech Eng. 2021;380:113757.
da Veiga LB, Lovadina C, Reali A. Avoiding shear locking for the Timoshenko beam problem via isogeometric collocation methods. Comput Methods Appl Mech Eng. 2012;241:38–51.
Kiendl J, Marino E, De Lorenzis L. Isogeometric collocation for the Reissner–Mindlin shell problem. Comput Methods Appl Mech Eng. 2017;325:645–65.
Adam C, Bouabdallah S, Zarroug M, Maitournam H. Improved numerical integration for locking treatment in isogeometric structural elements Part II: plates and shells. Comput Methods Appl Mech Eng. 2015;284:106–37.
Li W, Moutsanidis G, Behzadinasab M, Hillman M, Bazilevs Y. Reduced quadrature for Finite Element and Isogeometric methods in nonlinear solids. Comput Methods Appl Mech Eng. 2022;399: 115389.
Kikis G, Klinkel S. Two-field formulations for isogeometric Reissner–Mindlin plates and shells with global and local condensation. Comput Mech. 2022;69(1):1–21.
Thai CH, Nguyen-Xuan H, Nguyen-Thanh N, Le TH, Nguyen-Thoi T, Rabczuk T. Static, free vibration, and buckling analysis of laminated composite Reissner–Mindlin plates using NURBS-based isogeometric approach. Int J Numer Meth Eng. 2012;91:571–603.
Lee SJ, Park KS. Vibrations of Timoshenko beams with isogeometric approach. Appl Math Model. 2013;37:9174–90.
Luu AT, Kim NI, Lee J. Isogeometric vibration analysis of free-form Timoshenko curved beams. Meccanica. 2015;50:169–87.
Zhao G, Du X, Wang W, Liu B, Fang H. Application of isogeometric method to free vibration of Reissner–Mindlin plates with non-conforming multi-patch. Comput Aided Des. 2017;82:127–39.
Shafei E, Faroughi S, Reali A. Geometrically nonlinear vibration of anisotropic composite beams using isogeometric third-order shear deformation theory. Compos Struct. 2020;252:112627.
Chen H, Wu R, **e L, Du J, Yi L, Huang B, Zhang A, Wang J. High-frequency vibrations of circular and annular plates with the Mindlin plate theory. Arch Appl Mech. 2020;90:1025–38.
Huang J, Nguyen-Thanh N, Gao J, Fan Z, Zhou K. Static, free vibration, and buckling analyses of laminated composite plates via an isogeometric meshfree collocation approach. Compos Struct. 2022;285:115011.
Wang D, Zhang H. A consistently coupled isogeometric-meshfree method. Comput Methods Appl Mech Eng. 2014;268:843–70.
Zhang H, Wang D. Reproducing kernel formulation of B-spline and NURBS basis functions: a meshfree local refinement strategy for isogeometric analysis. Comput Methods Appl Mech Eng. 2017;320:474–508.
Rao SS. Vibration of continuous systems. New Jersey: Wiley; 2007.
Wang D, Pan F, Xu X, Li X. Superconvergent isogeometric analysis of natural frequencies for elastic continua with quadratic splines. Comput Methods Appl Mech Eng. 2019;347:874–905.
Sun Z, Wang D, Li X. Isogeometric free vibration analysis of curved Euler-Bernoulli beams with particular emphasis on accuracy study. Int J Struct Stab Dyn. 2021;21(1):2150011.
Li X, Wang D, Xu X, Sun Z. A nodal spacing study on the frequency convergence characteristics of structural free vibration analysis by lumped mass Lagrangian finite elements. Eng Comput. 2022. https://doi.org/10.1007/s00366022-016689.
Funding
This work is supported by the National Natural Science Foundation of China (Grant Nos. 12072302 and 11772280) and the Natural Science Foundation of Fujian Province of China (Grant No. 2021J02003).
Author information
Authors and Affiliations
Contributions
DW designed the study, supervised the project and analyzed results. XX carried out the analytical derivations and analyzed results. XX, ZL and SH performed the numerical simulations. All authors contributed to the manuscript writing.
Corresponding author
Ethics declarations
Conflict of Interests
The authors declare no competing interests.
Consent for Publication
The authors give their consent for publication.
Appendices
Appendix A
1.1 A. 1 Explicit Mass and Stiffness Matrices for IGA-FI
This sub-appendix provides the details for the plate mass and stiffness matrices in Eqs. (30) and (31) for IGA-FI.
-
1)
Mass sub-matrices
$$ \tilde{\user2{M}}_{11}^{{{{{be}}}}} = \frac{{\rho \tau h^{2} }}{14400}\tilde{\user2{X}},\tilde{\user2{M}}_{22}^{{{{{se}}}}} = \tilde{\user2{M}}_{33}^{{{{{se}}}}} = \frac{{\rho Ih^{2} }}{14400}\tilde{\user2{X}} $$(97)
with
-
2)
Stiffness sub-matrices
$$ \tilde{\user2{K}}_{22}^{be} = - \frac{D}{1440}\left[ {\begin{array}{*{20}c} {12\nu_{ - 3}^{1} } & {2\nu_{ - 7}^{13} } & {2\nu_{ + 5}^{1} } & { - 2\nu_{ + 23}^{3} } & { - 13\nu_{ - 3}^{1} } & { - \nu_{ - 27}^{1} } & { - 2\nu_{ - 1}^{3} } & { - \nu_{ - 15}^{13} } & { - \nu_{ - 3}^{1} } \\ {} & {12\nu_{ - 11}^{9} } & {2\nu_{ - 7}^{13} } & { - 13\nu_{ - 3}^{1} } & { - 2\nu_{ - 1}^{27} } & { - 13\nu_{ - 3}^{1} } & { - \nu_{ - 15}^{13} } & { - 2\nu_{ - 25}^{27} } & { - \nu_{ - 15}^{13} } \\ {} & {} & {12\nu_{ - 3}^{1} } & { - \nu_{ - 27}^{1} } & { - 13\nu_{ - 3}^{1} } & { - 2\nu_{ + 23}^{3} } & { - \nu_{ - 3}^{1} } & { - \nu_{ - 15}^{13} } & { - 2\nu_{ - 1}^{3} } \\ {} & {} & {} & {12\nu_{ - 19}^{1} } & {2\nu_{ + 41}^{13} } & {2\nu_{ + 53}^{1} } & { - 2\nu_{ + 23}^{3} } & { - 13\nu_{ - 3}^{1} } & { - \nu_{ - 27}^{1} } \\ {} & {} & {} & {} & {108\nu_{ - 3}^{1} } & {2\nu_{ + 41}^{13} } & { - 13\nu_{ - 3}^{1} } & { - 2\nu_{ - 1}^{27} } & { - 13\nu_{ - 3}^{1} } \\ {} & {} & {} & {} & {} & {12\nu_{ - 19}^{1} } & { - \nu_{ - 27}^{1} } & { - 13\nu_{ - 3}^{1} } & { - 2\nu_{ + 23}^{3} } \\ {} & {} & {{\text{sym}}.} & {} & {} & {} & {12\nu_{ - 3}^{1} } & {2\nu_{ - 7}^{13} } & {2\nu_{ + 5}^{1} } \\ {} & {} & {} & {} & {} & {} & {} & {12\nu_{ - 11}^{9} } & {2\nu_{ - 7}^{13} } \\ {} & {} & {} & {} & {} & {} & {} & {} & {12\nu_{ - 3}^{1} } \\ \end{array} } \right] $$(99)$$ \tilde{\user2{K}}_{23}^{{{{be}}}} = \left( {\tilde{\user2{K}}_{32}^{{{{be}}}} } \right)^{\rm T} = \frac{D}{1152}\left[ {\begin{array}{*{20}c} {9\nu_{ + 1}^{1} } & {6\nu_{ - 1}^{9} } & {3\nu_{ - 1}^{3} } & { - 12\nu_{ - 2}^{3} } & { - 16\nu_{ + 1}^{1} } & {4\nu_{ - 2}^{1} } & { - 3\nu_{ - 1}^{3} } & { - 2\nu_{ + 1}^{7} } & { - \nu_{ + 1}^{1} } \\ { - 12\nu_{ - 2}^{3} } & 0 & {12\nu_{ - 2}^{3} } & { - 8\nu_{ - 8}^{7} } & 0 & {8\nu_{ - 8}^{7} } & { - 4\nu_{ - 2}^{1} } & 0 & {4\nu_{ - 2}^{1} } \\ { - 3\nu_{ - 1}^{3} } & { - 6\nu_{ - 1}^{9} } & { - 9\nu_{ + 1}^{1} } & { - 4\nu_{ - 2}^{1} } & {16\nu_{ + 1}^{1} } & {12\nu_{ - 2}^{3} } & {\nu_{ + 1}^{1} } & {2\nu_{ + 1}^{7} } & {3\nu_{ - 1}^{3} } \\ {6\nu_{ - 1}^{9} } & {4\nu_{ + 1}^{31} } & {2\nu_{ + 1}^{7} } & 0 & 0 & 0 & { - 6\nu_{ - 1}^{9} } & { - 4\nu_{ + 1}^{31} } & { - 2\nu_{ + 1}^{7} } \\ { - 16\nu_{ + 1}^{1} } & 0 & {16\nu_{ + 1}^{1} } & 0 & 0 & 0 & {16\nu_{ + 1}^{1} } & 0 & { - 16\nu_{ + 1}^{1} } \\ { - 2\nu_{ + 1}^{7} } & { - 4\nu_{ + 1}^{31} } & { - 6\nu_{ - 1}^{9} } & 0 & 0 & 0 & {2\nu_{ + 1}^{7} } & {4\nu_{ + 1}^{31} } & {6\nu_{ - 1}^{9} } \\ {3\nu_{ - 1}^{3} } & {2\nu_{ + 1}^{7} } & {\nu_{ + 1}^{1} } & {12\nu_{ - 2}^{3} } & {16\nu_{ + 1}^{1} } & { - 4\nu_{ - 2}^{1} } & { - 9\nu_{ + 1}^{1} } & { - 6\nu_{ - 1}^{9} } & { - 3\nu_{ - 1}^{3} } \\ {4\nu_{ - 2}^{1} } & 0 & { - 4\nu_{ - 2}^{1} } & {8\nu_{ - 8}^{7} } & 0 & { - 8\nu_{ - 8}^{7} } & {12\nu_{ - 2}^{3} } & 0 & { - 12\nu_{ - 2}^{3} } \\ { - \nu_{ + 1}^{1} } & { - 2\nu_{ + 1}^{7} } & { - 3\nu_{ - 1}^{3} } & {4\nu_{ - 2}^{1} } & { - 16\nu_{ + 1}^{1} } & { - 12\nu_{ - 2}^{3} } & {3\nu_{ - 1}^{3} } & {6\nu_{ - 1}^{9} } & {9\nu_{ + 1}^{1} } \\ \end{array} } \right] $$(100)$$ \tilde{\user2{K}}_{33}^{be} = - \frac{D}{1440}\left[ {\begin{array}{*{20}c} {12\nu_{ - 3}^{1} } & { - 2\nu_{ + 23}^{3} } & { - 2\nu_{ - 1}^{3} } & {2\nu_{ - 7}^{13} } & { - 13\nu_{ - 3}^{1} } & { - \nu_{ - 15}^{13} } & {2\nu_{ + 5}^{1} } & { - \nu_{ - 27}^{1} } & { - \nu_{ - 3}^{1} } \\ {} & {12\nu_{ - 19}^{1} } & { - 2\nu_{ + 23}^{3} } & { - 13\nu_{ - 3}^{1} } & {2\nu_{ + 41}^{13} } & { - 13\nu_{ - 3}^{1} } & { - \nu_{ - 27}^{1} } & {2\nu_{ + 53}^{1} } & { - \nu_{ - 27}^{1} } \\ {} & {} & {12\nu_{ - 3}^{1} } & { - \nu_{ - 15}^{13} } & { - 13\nu_{ - 3}^{1} } & {2\nu_{ - 7}^{13} } & { - \nu_{ - 3}^{1} } & { - \nu_{ - 27}^{1} } & {2\nu_{ + 5}^{1} } \\ {} & {} & {} & {12\nu_{ - 11}^{9} } & { - 2\nu_{ - 1}^{27} } & { - 2\nu_{ - 25}^{27} } & {2\nu_{ - 7}^{13} } & { - 13\nu_{ - 3}^{1} } & { - \nu_{ - 15}^{13} } \\ {} & {} & {} & {} & {108\nu_{ - 3}^{1} } & { - 2\nu_{ - 1}^{27} } & { - 13\nu_{ - 3}^{1} } & {2\nu_{ + 41}^{13} } & { - 13\nu_{ - 3}^{1} } \\ {} & {} & {} & {} & {} & {12\nu_{ - 11}^{9} } & { - \nu_{ - 15}^{13} } & { - 13\nu_{ - 3}^{1} } & {2\nu_{ - 7}^{13} } \\ {} & {} & {{\text{sym}}.} & {} & {} & {} & {12\nu_{ - 3}^{1} } & { - 2\nu_{ + 23}^{3} } & { - 2\nu_{ - 1}^{3} } \\ {} & {} & {} & {} & {} & {} & {} & {12\nu_{ - 19}^{1} } & { - 2\nu_{ + 23}^{3} } \\ {} & {} & {} & {} & {} & {} & {} & {} & {12\nu_{ - 3}^{1} } \\ \end{array} } \right] $$(101)$$ \tilde{\user2{K}}_{11}^{{{{se}}}} = \frac{{k_{s} G\tau }}{360}\left[ {\begin{array}{*{20}c} {12} & {10} & { - 2} & {10} & { - 13} & { - 7} & { - 2} & { - 7} & { - 1} \\ {} & {60} & {10} & { - 13} & { - 14} & { - 13} & { - 7} & { - 26} & { - 7} \\ {} & {} & {12} & { - 7} & { - 13} & {10} & { - 1} & { - 7} & { - 2} \\ {} & {} & {} & {60} & { - 14} & { - 26} & {10} & { - 13} & { - 7} \\ {} & {} & {} & {} & {108} & { - 14} & { - 13} & { - 14} & { - 13} \\ {} & {} & {} & {} & {} & {60} & { - 7} & { - 13} & {10} \\ {} & {} & {{\text{sym}}.} & {} & {} & {} & {12} & {10} & { - 2} \\ {} & {} & {} & {} & {} & {} & {} & {60} & {10} \\ {} & {} & {} & {} & {} & {} & {} & {} & {12} \\ \end{array} } \right] $$(102)$$ \tilde{\user2{K}}_{12}^{{{{se}}}} = \left( {\tilde{\user2{K}}_{21}^{{{{se}}}} } \right)^{\rm T} = \frac{{k_{s} G\tau h}}{2880}\left[ {\begin{array}{*{20}c} {18} & {48} & 6 & {39} & {104} & {13} & 3 & 8 & 1 \\ { - 12} & 0 & {12} & { - 26} & 0 & {26} & { - 2} & 0 & 2 \\ { - 6} & { - 48} & { - 18} & { - 13} & { - 104} & { - 39} & { - 1} & { - 8} & { - 3} \\ {39} & {104} & {13} & {162} & {432} & {54} & {39} & {104} & {13} \\ { - 26} & 0 & {26} & { - 108} & 0 & {108} & { - 26} & 0 & {26} \\ { - 13} & { - 104} & { - 39} & { - 54} & { - 432} & { - 162} & { - 13} & { - 104} & { - 39} \\ 3 & 8 & 1 & {39} & {104} & {13} & {18} & {48} & 6 \\ { - 2} & 0 & 2 & { - 26} & 0 & {26} & { - 12} & 0 & {12} \\ { - 1} & { - 8} & { - 3} & { - 13} & { - 104} & { - 39} & { - 6} & { - 48} & { - 18} \\ \end{array} } \right] $$(103)$$ \tilde{\user2{K}}_{13}^{{{{se}}}} = \left(\tilde{\user2{K}}_{31}^{se} \right)^{\rm T} = \frac{{k_{s} G\tau h}}{2880}\left[ {\begin{array}{*{20}c} {18} & {39} & 3 & {48} & {104} & 8 & 6 & {13} & 1 \\ {39} & {162} & {39} & {104} & {432} & {104} & {13} & {54} & {13} \\ 3 & {39} & {18} & 8 & {104} & {48} & 1 & {13} & 6 \\ { - 12} & { - 26} & { - 2} & 0 & 0 & 0 & {12} & {26} & 2 \\ { - 26} & { - 108} & { - 26} & 0 & 0 & 0 & {26} & {108} & {26} \\ { - 2} & { - 26} & { - 12} & 0 & 0 & 0 & 2 & {26} & {12} \\ { - 6} & { - 13} & { - 1} & { - 48} & { - 104} & { - 8} & { - 18} & { - 39} & { - 3} \\ { - 13} & { - 54} & { - 13} & { - 104} & { - 432} & { - 104} & { - 39} & { - 162} & { - 39} \\ { - 1} & { - 13} & { - 6} & { - 8} & { - 104} & { - 48} & { - 3} & { - 39} & { - 18} \\ \end{array} } \right] $$(104)$$ \tilde{\user2{K}}_{22}^{{{se}}} = \tilde{\user2{K}}_{33}^{{{se}}} = \frac{{k_{s} G\tau h^{2} }}{14400}\tilde{\user2{X}} $$(105)
where \(\nu_{ \pm n}^{m} \triangleq m\nu \pm n\), and \(h\) is the element length.
A. 2 Stencil Equation Coefficients for IGA-FI
The coefficients \(\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{c}_{i}\), \(\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{s}_{i}\), \(\mathcal{H}_{IJ}^{[i]}\)’s and \(\mathcal{T}_{II}^{[i]}\)’s in Eq. (36) are defined as follows:
with
Appendix B
B. 1 Explicit Mass and Stiffness Matrices for IGA-RI
This sub-appendix illustrates the plate mass and stiffness matrices in Eqs. (73) and (74) for IGA-RI.
-
1)
Mass sub-matrices
$$ \overline{\user2{M}}_{11}^{{{{be}}}} = \frac{{\rho \tau h^{2} }}{20736}\overline{\user2{X}},\overline{\user2{M}}_{22}^{{{{se}}}} = \overline{\user2{M}}_{33}^{{{{se}}}} = \frac{{\rho Ih^{2} }}{20736}\overline{\user2{X}} $$(111)
with
-
2)
Stiffness sub-matrices
$$ \overline{\user2{K}}_{22}^{{{{be}}}} = - \frac{D}{1728}\left[ {\begin{array}{*{20}c} {14\nu_{ - 3}^{1} } & {2\nu_{ - 9}^{16} } & {2\nu_{ + 6}^{1} } & { - \nu_{ + 57}^{7} } & { - 16\nu_{ - 3}^{1} } & { - \nu_{ - 33}^{1} } & { - \nu_{ - 3}^{7} } & { - 2\nu_{ - 9}^{8} } & { - \nu_{ - 3}^{1} } \\ {} & {4\nu_{ - 39}^{32} } & {2\nu_{ - 9}^{16} } & { - 16\nu_{ - 3}^{1} } & { - 64\nu } & { - 16\nu_{ - 3}^{1} } & { - 2\nu_{ - 9}^{8} } & { - 4\nu_{ - 15}^{16} } & { - 2\nu_{ - 9}^{8} } \\ {} & {} & {14\nu_{ - 3}^{1} } & { - \nu_{ - 33}^{1} } & { - 16\nu_{ - 3}^{1} } & { - \nu_{ + 57}^{7} } & { - \nu_{ - 3}^{1} } & { - 2\nu_{ - 9}^{8} } & { - \nu_{ - 3}^{7} } \\ {} & {} & {} & {2\nu_{ - 135}^{7} } & {32\nu_{ + 3}^{1} } & {2\nu_{ + 63}^{1} } & { - \nu_{ + 57}^{7} } & { - 16\nu_{ - 3}^{1} } & { - \nu_{ - 33}^{1} } \\ {} & {} & {} & {} & {128\nu_{ - 3}^{1} } & {32\nu_{ + 3}^{1} } & { - 16\nu_{ - 3}^{1} } & { - 64\nu } & { - 16\nu_{ - 3}^{1} } \\ {} & {} & {} & {} & {} & {2\nu_{ - 135}^{7} } & { - \nu_{ - 33}^{1} } & { - 16\nu_{ - 3}^{1} } & { - \nu_{ + 57}^{7} } \\ {} & {} & {{\text{sym}}.} & {} & {} & {} & {14\nu_{ - 3}^{1} } & {2\nu_{ - 9}^{16} } & {2\nu_{ + 6}^{1} } \\ {} & {} & {} & {} & {} & {} & {} & {4\nu_{ - 39}^{32} } & {2\nu_{ - 9}^{16} } \\ {} & {} & {} & {} & {} & {} & {} & {} & {14\nu_{ - 3}^{1} } \\ \end{array} } \right] $$(113)$$ \overline{\user2{K}}_{23}^{{{{be}}}} = \left( {\overline{\user2{K}}_{32}^{{{{be}}}} } \right)^{\rm T} = \frac{D}{1152}\left[ {\begin{array}{*{20}c} {9\nu_{ + 1}^{1} } & { - 12\nu_{ - 2}^{3} } & { - 3\nu_{ - 1}^{3} } & {6\nu_{ - 1}^{9} } & { - 16\nu_{ + 1}^{1} } & { - 2\nu_{ + 1}^{7} } & {3\nu_{ - 1}^{3} } & {4\nu_{ - 2}^{1} } & { - \nu_{ + 1}^{1} } \\ {6\nu_{ - 1}^{9} } & 0 & { - 6\nu_{ - 1}^{9} } & {4\nu_{ + 1}^{31} } & 0 & { - 4\nu_{ + 1}^{31} } & {2\nu_{ + 1}^{7} } & 0 & { - 2\nu_{ + 1}^{7} } \\ {3\nu_{ - 1}^{3} } & {12\nu_{ - 2}^{3} } & { - 9\nu_{ + 1}^{1} } & {2\nu_{ + 1}^{7} } & {16\nu_{ + 1}^{1} } & { - 6\nu_{ - 1}^{9} } & {\nu_{ + 1}^{1} } & { - 4\nu_{ - 2}^{1} } & { - 3\nu_{ - 1}^{3} } \\ { - 12\nu_{ - 2}^{3} } & { - 8\nu_{ - 8}^{7} } & { - 4\nu_{ - 2}^{1} } & 0 & 0 & 0 & {12\nu_{ - 2}^{3} } & {8\nu_{ - 8}^{7} } & {4\nu_{ - 2}^{1} } \\ { - 16\nu_{ + 1}^{1} } & 0 & {16\nu_{ + 1}^{1} } & 0 & 0 & 0 & {16\nu_{ + 1}^{1} } & 0 & { - 16\nu_{ + 1}^{1} } \\ {4\nu_{ - 2}^{1} } & {8\nu_{ - 8}^{7} } & {12\nu_{ - 2}^{3} } & 0 & 0 & 0 & { - 4\nu_{ - 2}^{1} } & { - 8\nu_{ - 8}^{7} } & { - 12\nu_{ - 2}^{3} } \\ { - 3\nu_{ - 1}^{3} } & { - 4\nu_{ - 2}^{1} } & {\nu_{ + 1}^{1} } & { - 6\nu_{ - 1}^{9} } & {16\nu_{ + 1}^{1} } & {2\nu_{ + 1}^{7} } & { - 9\nu_{ + 1}^{1} } & {12\nu_{ - 2}^{3} } & {3\nu_{ - 1}^{3} } \\ { - 2\nu_{ + 1}^{7} } & 0 & {2\nu_{ + 1}^{7} } & { - 4\nu_{ + 1}^{31} } & 0 & {4\nu_{ + 1}^{31} } & { - 6\nu_{ - 1}^{9} } & 0 & {6\nu_{ - 1}^{9} } \\ { - \nu_{ + 1}^{1} } & {4\nu_{ - 2}^{1} } & {3\nu_{ - 1}^{3} } & { - 2\nu_{ + 1}^{7} } & { - 16\nu_{ + 1}^{1} } & {6\nu_{ - 1}^{9} } & { - 3\nu_{ - 1}^{3} } & { - 12\nu_{ - 2}^{3} } & {9\nu_{ + 1}^{1} } \\ \end{array} } \right] $$(114)$$ \overline{\user2{K}}_{33}^{{{{be}}}} = - \frac{D}{1728}\left[ {\begin{array}{*{20}c} {14\nu_{ - 3}^{1} } & { - \nu_{ + 57}^{7} } & { - \nu_{ - 3}^{7} } & {2\nu_{ - 9}^{16} } & { - 16\nu_{ - 3}^{1} } & { - 2\nu_{ - 9}^{8} } & {2\nu_{ + 6}^{1} } & { - \nu_{ - 33}^{1} } & { - \nu_{ - 3}^{1} } \\ {} & {2\nu_{ - 135}^{7} } & { - \nu_{ + 57}^{7} } & { - 16\nu_{ - 3}^{1} } & {32\nu_{ + 3}^{1} } & { - 16\nu_{ - 3}^{1} } & { - \nu_{ - 33}^{1} } & {2\nu_{ + 63}^{1} } & { - \nu_{ - 33}^{1} } \\ {} & {} & {14\nu_{ - 3}^{1} } & { - 2\nu_{ - 9}^{8} } & { - 16\nu_{ - 3}^{1} } & {2\nu_{ - 9}^{16} } & { - \nu_{ - 3}^{1} } & { - \nu_{ - 33}^{1} } & {2\nu_{ + 6}^{1} } \\ {} & {} & {} & {4\nu_{ - 39}^{32} } & { - 64\nu } & { - 4\nu_{ - 15}^{16} } & {2\nu_{ - 9}^{16} } & { - 16\nu_{ - 3}^{1} } & { - 2\nu_{ - 9}^{8} } \\ {} & {} & {} & {} & {128\nu_{ - 3}^{1} } & { - 64\nu } & { - 16\nu_{ - 3}^{1} } & {32\nu_{ + 3}^{1} } & { - 16\nu_{ - 3}^{1} } \\ {} & {} & {} & {} & {} & {4\nu_{ - 39}^{32} } & { - 2\nu_{ - 9}^{8} } & { - 16\nu_{ - 3}^{1} } & {2\nu_{ - 9}^{16} } \\ {} & {} & {{\text{sym}}.} & {} & {} & {} & {14\nu_{ - 3}^{1} } & { - \nu_{ + 57}^{7} } & { - \nu_{ - 3}^{7} } \\ {} & {} & {} & {} & {} & {} & {} & {2\nu_{ - 135}^{7} } & { - \nu_{ + 57}^{7} } \\ {} & {} & {} & {} & {} & {} & {} & {} & {14\nu_{ - 3}^{1} } \\ \end{array} } \right] $$(115)$$ \overline{\user2{K}}_{11}^{se} = \frac{{k_{s} G\tau }}{864}\left[ {\begin{array}{*{20}c} {28} & {25} & { - 5} & {25} & { - 32} & { - 17} & { - 5} & { - 17} & { - 2} \\ {} & {142} & {25} & { - 32} & { - 32} & { - 32} & { - 17} & { - 62} & { - 17} \\ {} & {} & {28} & { - 17} & { - 32} & {25} & { - 2} & { - 17} & { - 5} \\ {} & {} & {} & {142} & { - 32} & { - 62} & {25} & { - 32} & { - 17} \\ {} & {} & {} & {} & {256} & { - 32} & { - 32} & { - 32} & { - 32} \\ {} & {} & {} & {} & {} & {142} & { - 17} & { - 32} & {25} \\ {} & {} & {{\text{sym}}.} & {} & {} & {} & {28} & {25} & { - 5} \\ {} & {} & {} & {} & {} & {} & {} & {142} & {25} \\ {} & {} & {} & {} & {} & {} & {} & {} & {28} \\ \end{array} } \right] $$(116)$$ \overline{\user2{K}}_{12}^{{{{se}}}} = \left( {\overline{\user2{K}}_{21}^{{{{se}}}} } \right)^{\rm T} = \frac{{k_{s} G\tau h}}{3456}\left[ {\begin{array}{*{20}c} {21} & {56} & 7 & {48} & {128} & {16} & 3 & 8 & 1 \\ { - 14} & 0 & {14} & { - 32} & 0 & {32} & { - 2} & 0 & 2 \\ { - 7} & { - 56} & { - 21} & { - 16} & { - 128} & { - 48} & { - 1} & { - 8} & { - 3} \\ {48} & {128} & {16} & {192} & {512} & {64} & {48} & {128} & {16} \\ { - 32} & 0 & {32} & { - 128} & 0 & {128} & { - 32} & 0 & {32} \\ { - 16} & { - 128} & { - 48} & { - 64} & { - 512} & { - 192} & { - 16} & { - 128} & { - 48} \\ 3 & 8 & 1 & {48} & {128} & {16} & {21} & {56} & 7 \\ { - 2} & 0 & 2 & { - 32} & 0 & {32} & { - 14} & 0 & {14} \\ { - 1} & { - 8} & { - 3} & { - 16} & { - 128} & { - 48} & { - 7} & { - 56} & { - 21} \\ \end{array} } \right] $$(117)$$ \overline{\user2{K}}_{13}^{{{{se}}}} = \left( {\overline{\user2{K}}_{31}^{{{se}}} } \right)^{\rm T} = \frac{{k_{s} G\tau h}}{3456}\left[ {\begin{array}{*{20}c} {21} & {48} & 3 & {56} & {128} & 8 & 7 & {16} & 1 \\ {48} & {192} & {48} & {128} & {512} & {128} & {16} & {64} & {16} \\ 3 & {48} & {21} & 8 & {128} & {56} & 1 & {16} & 7 \\ { - 14} & { - 32} & { - 2} & 0 & 0 & 0 & {14} & {32} & 2 \\ { - 32} & { - 128} & { - 32} & 0 & 0 & 0 & {32} & {128} & {32} \\ { - 2} & { - 32} & { - 14} & 0 & 0 & 0 & 2 & {32} & {14} \\ { - 7} & { - 16} & { - 1} & { - 56} & { - 128} & { - 8} & { - 21} & { - 48} & { - 3} \\ { - 16} & { - 64} & { - 16} & { - 128} & { - 512} & { - 128} & { - 48} & { - 192} & { - 48} \\ { - 1} & { - 16} & { - 7} & { - 8} & { - 128} & { - 56} & { - 3} & { - 48} & { - 21} \\ \end{array} } \right] $$(118)$$ \overline{\user2{K}}_{22}^{se} = \overline{\user2{K}}_{33}^{se} = \frac{{k_{s} G\tau h^{2} }}{20736}\overline{\user2{X}} $$(119)
B. 2 Stencil Equation Coefficients for IGA-RI
The coefficients \(\overline{\mathcal{H}}_{IJ}^{[i]}\)’s and \(\overline{\mathcal{T}}_{II}^{[i]}\)’s in Eq. (75) are described as follows:
with
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Xu, X., Lin, Z., Hou, S. et al. Coarse Mesh Superconvergence in Isogeometric Frequency Analysis of Mindlin–Reissner Plates with Reduced Integration and Quadratic Splines. Acta Mech. Solida Sin. 35, 922–939 (2022). https://doi.org/10.1007/s10338-022-00365-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10338-022-00365-w