
Abstract
In this paper, we consider a fractional COVID-19 epidemic model with a convex incidence rate. The Atangana–Baleanu fractional operator in the Caputo sense is taken into account. We establish the equilibrium points, basic reproduction number, and local stability at both the equilibrium points. The existence and uniqueness of the solution are proved by using Banach and Leray–Schauder alternative type theorems. For the fractional numerical simulations, we use the Toufik–Atangana scheme. Optimal control analysis is carried out to minimize the infection and maximize the susceptible people.
Similar content being viewed by others

1 Introduction
Corona virus or severe acute respiratory syndrome corona virus 2 (SARS-CoV-2) is a virus that attacks the respiratory system. The virus that causes this disease is called COVID-19 (corona virus disease 2019). The ICTV corona virus disease study group stated that this virus is a species associated with the severe acute respiratory syndrome. COVID-19 was first discovered in humans in December 2019. This outbreak was first detected in Wuhan city, Hubei province, China, in mid-December 2019. The outbreak due to SARS-CoV-2 was declared a global health emergency or pandemic by the World Health Organization (WHO) on January 30, 2020. The Chinese government conducted quarantine in the city of Wuhan on January 23, 2020 as a step to control the pandemic [1].
Modeling in mathematics is a tremendous tool for expressing and dealing with complicated phenomena. Recently, considerable attention has been given to the proposal of mathematical models in comprehending the ailment of infectious nature [2–6]. Many researchers have developed models for the realization and regulation of the outbreak of transmissible diseases in a population. Infectious diseases are the second largest cause of death across the globe. The discipline of infectious diseases will assume added prominence in the twenty-first century in both developed and develo** nations. To an unprecedented extent, issues related to infectious diseases in the context of global health are on the agendas of world leaders, health policymakers, and philanthropists. Over the last few years, several researchers have been exploring infectious diseases and their mechanisms using different methods [7–10]. This not only helps to control the spreading of infectious diseases but also aids in everyday life to prevent these diseases. Several researchers have researched epidemic models to examine and monitor various diseases such as avian influenza, hepatitis B, tuberculosis, leishmaniasis [11–13]. Since the existence and annihilation of COVID-19 is subject to numerous parameters of the affected system, we cannot characterize the entire disease system throughout the globe by using a single model. As in the case of COVID-19, the spreading of the disease has a direct relation with the quarantine of the human population. Commonly, we have two types of quarantine: one is susceptible quarantine and the second is infected quarantine. In our work, we take the infected quarantine which means that the people will be quarantined if they are infected.
Fractional calculus is the generalization of classical calculus. To get a better insight into a mathematical model and to deeply understand phenomena, noninteger order operators can be used. Moreover, models involving fractional-order derivatives provide a greater degree of accuracy and are able to abduct the fading memory and spanning behavior. Fractional order differential equation models give more understanding about a disease under consideration [14–17]. Literature has suggested a number of fractional operators with singular and nonsingular kernel [18–21], and their applications can be found in some recent studies [14, 16]. In [22], the authors considered co-dynamics for cancer and hepatitis using a mathematical model with fractional derivative and examined its results. For more details, see [23–25].
We consider the model available in [26] in which the total population is denoted by \(N(t)\) and is divided into five groups, namely: susceptible individuals \(S(t)\) which denotes individuals vulnerable to the infection; exposed individuals \(E(t)\); infectious individuals \(I(t)\); quarantined individuals \(Q(t)\); and recovered individuals \(R(t)\) at time t.
We reformulated the above model by fractionalizing it with the help of fractional parameter \(0 < \chi \leq 1\):
The parameters β̄ and δ̄ are positive constants, whereas b̄ is the constant birth rate, β̄ is the disease transmission coefficient, μ is the natural death rate, ϵ is the death rate for the disease of infectious individuals, and λ̄, γ̄, \(\bar{d}_{1}\), \(\bar{d}_{2}\), \(\bar{d}_{3}\), τ̄ are the state transition rates. η̄ is the transmission rate from the susceptible to the recovered class which represents those people who have strong immune system.
The organization of our paper is as follows: Sect. 2 deals with the basic definitions which are helpful in the analysis of the coming sections. Also the basic reproduction number as well as equilibrium points are established. The unique positive solution of our proposed model is given. Section 3 is concerned with the local stability of the proposed model. Existence and uniqueness are carried out in Sect. 4. Section 5 deals with the Ulam–Hyers stability of our model. Section 6 depicts some simulations carried out by the Atangana–Toufik scheme. In Sect. 7, optimal control analysis is applied to our model. And in the final Sect. 7, we give the concluding remarks along with the future work.
2 Preliminaries
The following definitions of Atangana–Baleanu fractional derivative and integration in the Caputo sense are taken from [27, 28]:
satisfying
for \(r(t) \in C[b_{1},b_{2}]\) and the Lipschitz condition
2.1 Basic reproduction number \(R_{0}\)
The DFE of model (2) is denoted by \(E^{0}(S_{0},0,0,Q_{0},R^{0})\), where
Similar to the method mentioned in [29], we calculate F and V as follows:
Hence
2.2 Endemic equilibrium point
System (2) is reshaped as
Taking into account the above values in
we get
where
By Descarte’s rule of the sign if \(A_{3}>0\), then (9) has one positive, one negative, and one zero root, and \(A_{3}>0\) implies that \(R_{0} > 1\). Hence, for \(R_{0} > 1\), a unique positive equilibrium exists for the model.
3 Local stability
We establish the local stability of system (2) in this section at COVID-19 free point \(E^{0}\) as well as at COVID-19 present equilibrium point \(E^{*}\).
Theorem 1
The COVID-19 free equilibrium (CFE) point \(E^{0}\) of the proposed fractional order SEQIR pandemic model (2) is locally asymptotically stable if \(R_{0} < 1\).
Proof
The Jacobian matrix of system (2) at \(E^{0}\) is
Therefore, by the Routh–Hurwitz stability conditions for fractional order systems [30], the necessary and sufficient condition is
for various fractional order models. Therefore, the disease-free equilibrium of system (2) is asymptotically stable if all of the eigenvalues \(\omega _{i}\), \(i=1,2,3,4,5\), of \(J(E^{0})\) satisfy condition (14). Hence, a sufficient condition for the local asymptotic stability of the equilibrium points is that the eigenvalues \(\omega _{i}\), \(i=1,2,3,4,5\), of the Jacobian matrix \(J(E^{0})\) satisfy the condition \(\vert \arg (\omega _{i} ) \vert >\kappa \frac{\pi }{2}\). This confirms that fractional order differential equations are, at least, as stable as their integer order counterparts.
The characteristic equation of \(J(E^{0})\) is
where
This shows that, for \(R_{0} < 1\), the quadratic equation \((A\omega ^{2} + B \omega +C)=0\) has all terms positive, and thus its roots must all be negative. Meanings \(\lambda _{4,5}<0\), all of the eigenvalues \(\omega _{i}\) for \(i=1,2,3,4,5\), satisfy the condition given by (14). Therefore, all the eigenvalues have negative real parts if \(R_{0} < 1\). This completes the proof. □
3.1 At pandemic equilibrium point
Lemma 1
Let M be a \(3\times 3\) real matrix. If \(\operatorname{tr}(M)\), \(\det (M)\), and \(\det M^{[2]}\) are all negative, then all eigenvalues of M have negative real parts.
Theorem 2
If \(R_{0}>1\), then the pandemic equilibrium \(E^{*}\) of the proposed fractional order SEQIR pandemic model (2) is locally asymptotically stable.
Proof
The Jacobian matrix of system (2) at \(E^{*}\) is
where \(a_{11}=(\bar{\beta } I_{*}(1+\bar{\delta } I_{*})+(\bar{\eta }+ \bar{\mu }+\bar{d}_{3}))\).
Therefore, by the Routh–Hurwitz stability conditions for fractional order systems [30], the necessary and sufficient condition is
for various fractional order models. Therefore, the disease-free equilibrium of system (2) is asymptotically stable if all of the eigenvalues \(\omega _{i}\), \(i=1,2,3,4,5\), of \(J^{| *| }(E^{*})\) satisfy condition (16). Hence, a sufficient condition for the local asymptotic stability of the equilibrium points is that the eigenvalues \(\omega _{i}\), \(i=1,2,3,4,5\), of the Jacobian matrix \(J^{| *| }(E^{*})\) satisfy the condition \(\vert \arg (\omega _{i} ) \vert >\kappa \frac{\pi }{2}\). This confirms that fractional order differential equations are, at least, as stable as their integer order counterparts.
Here, \(\omega _{1} = -\bar{\mu }\), \(\omega _{2} = -(\bar{\mu }+\bar{\tau })\), and we consider the following matrix for the rest of eigenvalues:
From the Jacobian matrix \(J^{| *| }_{1}\) we have
also
Further, the second additive compound matrix is
where
Hence
Therefore, by Lemma 1, all of the eigenvalues \(\omega _{i}\) for \(i=1,2,3,4,5\) satisfy the condition given by (16). Thus, the pandemic equilibrium point \(E^{*}\) is locally asymptotically stable. □
4 Existence and uniqueness
We denote a Banach space by \(D(W)\) with \(W =[0,b]\) containing a real-valued continuous function with sup norm and \(P=D(W) \times D(W) \times D(W) \times D(W) \times D(W) \) with norm \(\Vert (S, E, I, Q, R ) \Vert =\|S\|+\|E\|+ \Vert I \Vert + \Vert Q \Vert +\|R\|\), where \(\|S\|=\sup_{t \in J}|S(t)|\), \(\|E\|=\sup_{t \in j}|E(t)|\), \(\Vert I \Vert =\sup_{t \in j}|I(t)|\), \(\Vert Q \Vert =\sup_{t \in j}|Q(t)|\), \(\Vert R \Vert =\sup_{t \in j}|R(t)|\). By using the ABC integral operator on model (2), we get
Now, using equation (3), we obtain
where
The \(\mathfrak{K}_{1}\), \(\mathfrak{K}_{2}\), \(\mathfrak{K}_{3}\), \(\mathfrak{K}_{4}\), and \(\mathfrak{K}_{5} \) satisfy the Lipschitz condition only if \(S(t)\), \(E(t)\), \(I(t)\), \(Q(t)\), and \(R(t)\) possess an upper bound. Supposing \(S(t)\) and \(S^{*}(t)\) are couple functions, we have
Considering
we get
Similarly,
where
which shows that the Lipschitz condition holds. Continuing in a recursive manner, (18) gives us
together with \(S_{0}(t)=S(0)\), \(E_{0}(t)=E(0)\), \(I_{0}(t)=I(0)\), \(Q_{0}(t)=Q(0)\), and \(R_{0}(t)=R(0)\). Difference of consecutive terms yields
Noting that
Taking into account Eqs. (21)–(22) and considering that
we reach
Theorem 3
System (2) has a unique solution for \(t \in [0,b]\) subject to the condition if
holds.
Proof
Since \(S(t)\), \(E(t)\), \(I(t)\), \(Q(t)\), and \(R(t)\) are bounded functions and Eqs. (21)–(22) hold, in a recursive manner Eq. (27) leads to
So
as \(n \rightarrow \infty \). Incorporating the triangle inequality, and for any k, Eq. (29) yields
with \(Z_{i}=\frac{1-\chi }{B(\chi )} \eta _{i} + \frac{\chi }{B(\chi ) \Gamma (\chi )} \bar{b} \eta _{i}<1\) by hypothesis. Similar to the method as mentioned in [31], we can easily obtain the existence of a unique solution for system (2). □
5 Hyers–Ulam stability
Definition
([31])
The ABC fractional integral system given by Eq. (18) is said to be Hyers–Ulam stable if there exist constants \(\Delta _{i} >0\), \(i \in \mathbf{N}^{5}\) satisfying: For every \(\gamma _{i} >0\), \(i \in \mathbf{N}^{5}\), for
there exist \((\dot{S}(t), \dot{E}(t), \dot{I}(t), \dot{Q}(t), \dot{R}(t))\) which satisfy
such that
Theorem 4
Model (2) is Hyers–Ulam stable subject to the condition J.
Proof
Thanks to Theorem 3, the proposed ABC fractional model (2) has a unique solution \(({S}(t), {E}(t), {I}(t), {Q}(t), {R}(t))\) satisfying (18). Then we have
Taking \(\gamma _{i} = \chi _{i}\), \(\Delta _{i} = \frac{1-\chi }{B(\chi )}+ \frac{\chi }{B(\chi ) \Gamma (\chi )}\) implies
Similarly,
System (18) is Hyers–Ulam stable by taking into account (39) and (40), hence model (2) is Hyers–Ulam stable. □
6 Numerical scheme
To solve our proposed model we incorporate the Toufik–Atangana scheme [32]. For this we consider the first equation of (2). We have
the solution of which is
Applying Lagrange’s interpolation polynomial on the interval \([t_{k},t_{k+1}]\) to the equality \(G_{1}(y,S(y))=\frac{\Lambda }{\alpha _{3}}-b_{0} \frac{(I(y)+A(y)S(y))}{k(N)}-S(y)\) leads to
where \(h=t_{k}-t_{k-1}\). Now, substituting (43) into (42), we have
where
Incorporating \(t_{j}=jh\) into (45) and (46) leads to
Equation (44) with the help of (47) and (48) becomes
Similarly,
7 Graphical results
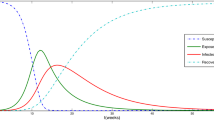
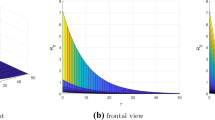
We get the numerical simulations based on (49)–(53) with parameter values given in Table 1. Figure 1 represents the dynamics of all the five population classes i.e. S, E, I, Q, and R when \(\chi =0.8\). Figure 2 represents the numerical simulation results for \(\alpha =0.2\) based on the Mittag—Leffler generalized function which is characterized by the crossover property when stretched from one operator to another. The operator has a statistical representation making it more viable. In Fig. 2, the susceptible human population increases as the fractional order χ derivative increases. In Fig. 2 the number of the exposed decreases as the fractional order χ value increases. Figure 2 depicts COVID-19 infected people, the number of which decreases as the fractional order derivative increases. Similarly, Fig. 2 depicts quarantined people and the number of quarantined people increases as the fractional order derivative increases. In Fig. 2 the recovered human population increases as the fractional order values increase. Figure 3 represents the numerical simulation results for \(\alpha =0.3\) and for different values of fractional parameter χ. Figure 4. shows the real data plot against the model infected people class.

For \(\chi =0.8\), plots of S, E, I, Q, R

Profiles for the first set of initial conditions at different χ values i.e. \(\chi =0.50, 0.55, 0.60, 0.65, 0.70, 0.75, 0.80, 0.85, 0.90\), and \(\alpha =0.2\)

Profiles for the second set of initial conditions at different χ values i.e. \(\chi =0.50, 0.55, 0.60, 0.65, 0.70, 0.75, 0.80, 0.85, 0.90\), and \(\alpha =0.2\)

The incidence data of COVID-19 from Khyber Pakhtunkhwa, Pakistan
8 Optimal control analysis
We use two control variables i.e. social distancing \(u_{1}(t)\) and treatment \(u_{2}(t)\) [33–35]. The objective functional is
Subject to the state system, model (2) is modified to (55) after incorporating the control variable
with ICs
In the objective functional (54), \(\mathcal{G}_{1}\), \(\mathcal{G}_{2}\), and \(\mathcal{G}_{3}\) are the relative weights and \(Z_{1}\) and \(Z_{2}\) measure the associated cost on social distancing and treatment, respectively. Our goal is to find the control function such that
subject to system (55), where the control set is defined as
The conditions that an optimal solution must satisfy are obtained by using Pontryagin’s maximum principle. This principle translates Eqs. (54)–(55) into a problem characterized with minimizing the following Hamiltonian H with regard to control variables:
where \(\lambda _{1}(t)\), \(\lambda _{2}(t)\), \(\lambda _{3}(t)\), \(\lambda _{4}(t)\), and \(\lambda _{5}(t)\) are made up of the adjoint variables. The system solution is determined by taking the partial derivatives of Hamiltonian (59) with respect to the associated state variable.
Following [32], we obtain the necessary optimality conditions for the system of equations (54) and (55):
Theorem 5
In view of the optimal controls, \((u_{1}^{*},u_{2}^{*})\) is the solution of the above control system (54)–(55), then we can find the adjoint variables \(\lambda _{i}(t)\) for \(i=S,E,I,Q,R\), satisfying
where \(i=S,E,I,Q,R\) and with the transversality conditions
Furthermore, the optimal control variables \(u_{1}^{*}(t)\), \(u_{2}^{*}(t)\) are defined by
where
Proof
Using (62), we reach the adjoint system
Also, by applying \(\frac{\partial H}{\partial u i}=0\), we get (64) for \(i=1,2\). □
8.1 Scheme for FOCP
For a general initial value problem [36]
With the help of the fundamental theorem of fractional calculus to Eq. (66), we have
With the normalization function \(\mathfrak{B}(\chi )=1-\chi +\frac{\chi }{\Gamma (\chi )}\) at \(t_{n + 1}\), after discretization, we have
Now, approximating \(r(\eta , e(\eta ))\) by the two-step Lagrange interpolation [37], we have
Now, we get
To get high stability, we incorporate a simple modification [36] such that replacing h (step size) with \(\chi (h)\) with \(\chi (h)=h+O(h^{2}); 0<\chi (h)\leq 1\). This new scheme is a nonstandard one characterized by unconditional stability, and details can be established in [38], and we obtain the following scheme:
The new scheme is therefore utilized in Eq. (71) to obtain a numerical solution to the state system. Further, we make of use the implicit finite difference method in order to derive the solution of the co-state system Eqs. (55) together with the transversality conditions in Eq. (63). Figure 5 shows the difference between with and without control of each class of the model while Fig. 6 shows the profiles of each control variable.

Profiles for behavior of each state variable for the fractional model with and without control

Profiles for the behavior of control variables \(u_{1}\) and \(u_{2}\)
9 Conclusion
In the current analysis, the COVID-19 model has been examined by one of the robust nonlocal fractional operators called the ABC operator in the Caputo sense. COVID-19 is one of the most quickly killing virus. The toxic effects of the infectious disease COVID-19 are very slow-acting and death or life from overdose typically occurs. It is of vehement importance to analyze more critically the dynamic of this subtle virus. The fractional operator employed has been shown to be ideally suitable for studying the transmission dynamics of a disease in the literature. The fractionalized order is χ, and consideration was given to the dimensional consistency between the rest of the parameters. As a result, several important features of the proposed fractional version of the model have been documented, such as the model formation, the existence and uniqueness of the solution through the fixed point theorem, invariant region, stability analysis, and, most importantly, the basic number of reproductions. It should be noted that the fractional type disease model under investigation comprehends the behavior of the disease more correctly than the variant of the integer order. In addition, different numerical simulations were carried out by means of an efficient numerical scheme in order to shed more light on the features of the model.
Availability of data and materials
Not applicable.
References
Waris, A., Khan, A.U., Ali, M., Ali, A., Baset, A.: COVID-19 outbreak: current scenario of Pakistan. New Microbes New Infect. 35, 100681 (2020)
Wang, J., Zhang, J., Liu, X.: Modelling diseases with relapse and nonlinear incidence of infection: a multi group epidemic model. J. Biol. Dyn. 8, 99–116 (2014)
Wang, J., Zhang, R., Kuniya, T.: The stability anaylsis of an SVEIR model with continuous age-structure in the exposed and infection classes. J. Biol. Dyn. 9, 73–101 (2015)
Castillo-Chavez, C., Blower, S., van den Driessche, P., Kirschner, D., Yakubu, A.-A. (eds.): Mathematical Approaches for Emerging and Reemerging Infectious Diseases: An Introduction, vol. 1. Springer, Berlin (2002)
Zhao, S., Xu, Z., Lu, Y.: A mathematical model of hepatitis B virus transmission and its application for vaccination strategy in China. Int. J. Epidemiol. 29, 744–752 (2000)
Khan, A., Zarin, R., Inc, M., et al.: Stability analysis of leishmania epidemic model with harmonic mean type incidence rate. Eur. Phys. J. Plus 135, 528 (2020)
Lahrouz, A., Omari, L., Kiouach, D., Belmati, A.: Complete global stability for an SIRS epidemic model with generalized nonlinear incidence rate and vaccination. Appl. Math. Comput. 21, 6519–6525 (2012)
Khan, S.A., Shah, K., Zaman, G., Jarad, F.: Existence theory and numerical solutions to smoking model under Caputo–Fabrizio fractional derivative. Chaos, Interdiscip. J. Nonlinear Sci. 29(1), 013128 (2019)
Shah, K., Jarad, F., Abdeljawad, T.: On a nonlinear fractional order model of Dengue fever disease under Caputo–Fabrizio derivative. Alex. Eng. J. 59(4), 2305–2313 (2020)
Shah, K., Alqudah, M.A., Jarad, F., Abdeljawad, T.: Semi-analytical study of Pine Wilt disease model with convex rate under Caputo–Febrizio fractional order derivative. Chaos Solitons Fractals 135, 109754 (2020)
Li, M.Y., Muldowney, J.S.: Global stability for the SEIR model in epidemiology. Math. Biosci. 125, 155–164 (1995)
Zaman, G., Kang, Y.H., Jung, I.H.: Stability analysis and optimal vaccination of an SIR epidemic model. Biosystems 93, 240–249 (2008)
Zou, L., Zhang, W., Ruan, S.: Modeling the transmission dynamics and control of hepatitis B virus in China. J. Theor. Biol. 262, 330–338 (2010)
Baleanu, D., Ghanbari, B., Asad, H.J., Jajarmi, A., Planar, P.H.M.: System-masses in an equilateral triangle: numerical study within fractional calculus. Comput. Model. Eng. Sci. (2020). https://doi.org/10.32604/cmes.2020.010236
Jajarmi, A., Baleanu, D.: A new iterative method for the numerical solution of high-order non-linear fractional boundary value problems. Front. Phys. (2020). https://doi.org/10.3389/fphy.2020.00220
Zarin, R., Khan, A., Yusuf, A., Khalek, S.-A., Inc, M.: Analysis of fractional COVID-19 epidemic model under Caputo operator. Math. Methods Appl. Sci. (2021). https://doi.org/10.1002/mma.7294
Shah, K., Abdeljawad, T., Mahariq, I., Jarad, F.: Qualitative analysis of a mathematical model in the time of COVID-19. BioMed Res. Int. 2020, Article ID 5098598 (2020)
Baleanu, D., Ghanbari, B., Asad, J.H., Jajarmi, A., Pirouz, H.M.: Planar system-masses in an equilateral triangle: numerical study within fractional calculus. Comput. Model. Eng. Sci. 124(3), 953–968 (2020)
Jajarmi, A., Baleanu, D.: A new iterative method for the numerical solution of high-order nonlinear fractional boundary value problems. Front. Phys. 8, 220 (2020). https://doi.org/10.3389/fphy.2020.00220
Yao, Y., Qin, W., **ng, B., Sha, N., Jiao, T., Zhao, Z.: High performance hydroxyapatite ceramics and a triply periodic minimum surface structure fabricated by digital light processing 3D printing. J. Adv. Ceram. 10(1), 39–48 (2021)
Abdo, M.S., Abdeljawad, T., Ali, S.M., Shah, K., Jarad, F.: Existence of positive solutions for weighted fractional order differential equations. Chaos Solitons Fractals 141, 110341 (2020)
Bonyah, E., Zarin, R., Fatmawati: Mathematical modeling of cancer and hepatitis co-dynamics with non-local and non-singular kernel. Commun. Math. Biol. Neurosci. 2020, Article ID 91 (2020). https://doi.org/10.28919/cmbn/5029
Akgül, A., Mustafa, M., Karatas, E., Baleanu, D.: Numerical solutions of fractional differential equations of Lane–Emden type by an accurate technique. Adv. Differ. Equ. 2015, 220 (2015)
Akgül, A.: A novel method for a fractional derivative with non-local and non-singular kernel. Chaos Solitons Fractals 114, 478–482 (2018)
Akgül, E.K.: Solutions of the linear and nonlinear differential equations within the generalized fractional derivatives. Chaos 29, 023108 (2019)
Khan, A., Zarin, R., Hussain, G., Ahmad, N.A., Mohd, M.H., Yusuf, A.: Stability analysis and optimal control of COVID-19 with convex incidence rate in Khyber Pakhtunkhawa (Pakistan). Results Phys. 20, 103703 (2020)
Baleanu, D., Jajarmi, A., Sajjadi, S.S., Mozyrska, D.: A new fractional model and optimal control of a tumor-immune surveillance with non-singular derivative operator. Chaos, Interdiscip. J. Nonlinear Sci. 29(8), 083127 (2019)
Atangana, A., Baleanu, D.: New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model. Therm. Sci. 20(2), 763–769 (2016)
Van den Driessche, P., Watmough, J.: Reproduction number and sub-threshold endemic equilbria for compartmental models of disease transmission. Math. Biosci. 180, 29–38 (2002)
Matignon, D.: Stability results for fractional differential equations with applications to control processing, computational engineering in systems and application. In: Multi Conference, IMACS, IEEE-SMC, pp. 963–968. IEEE Xplore, Lille (1996)
Zarin, R., Khan, A., Inc, M., Humphries, U.W., Karite, T.: Dynamics of five grade leishmania epidemic model using fractional operator with Mittag-Leffler kernel. Chaos Solitons Fractals 147, 110985 (2021)
Toufik, M., Atangana, A.: New numerical approximation of fractional derivative with non-local and non-singular kernel: application to chaotic models. Eur. Phys. J. Plus 132(10), 144 (2017)
Khan, K., Zarin, R., Khan, A., et al.: Stability analysis of five-grade leishmania epidemic model with harmonic mean-type incidence rate. Adv. Differ. Equ. 2021, 86 (2021)
Khan, A., Zarin, R., Hussain, G., Usman, A.H., Humphries, U.W., Gomez-Aguilar, J.F.: Modeling and sensitivity analysis of HBV epidemic model with convex incidence rate. Results Phys. 22, 103836 (2021)
Kamien, M.I., Schwartz, N.L.: Dynamic Optimization: The Calculus of Variations and Optimal Control in Economics and Management. Elsevier, Amsterdam (1991)
Sweilam, N.H., Al-Mekhlafi, S.M., Baleanu, D.: Optimal control for a fractional tuberculosis infection model including the impact of diabetes and resistant strains. J. Adv. Res. 17, 125–137 (2019)
Solís-Pérez, J.E., Gómez-Aguilar, J.F., Atangana, A.: Novel numerical method for solving variable-order fractional differential equations with power, exponential and Mittag-Leffler laws. Chaos Solitons Fractals 114, 175–185 (2018)
Sweilam, N.H., Al-Mekhlafi, S.M., Assiri, T., Atangana, A.: Optimal control for cancer treatment mathematical model using Atangana–Baleanu–Caputo fractional derivative. Adv. Differ. Equ. 2020, 334 (2020)
Acknowledgements
This research was supported by King Mongkut’s University of Technology Thonburi’s Postdoctoral Fellowship.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors have equal contributions. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Khan, A., Zarin, R., Humphries, U.W. et al. Fractional optimal control of COVID-19 pandemic model with generalized Mittag-Leffler function. Adv Differ Equ 2021, 387 (2021). https://doi.org/10.1186/s13662-021-03546-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03546-y