
Abstract
The specimens of anchorage structures bonded by different anchoring materials are prepared to study the damage and reduced safety and reliability caused by the cyclic loading and unloading stress to the roadway anchorage structure. Using Fiber Bragg grating, acoustic emission monitoring and ANSYS, the anchorage structures’ bearing properties, interface failure characteristics, overall failure mode and internal influence mechanism are obtained under cyclic loading and unloading stress path. Results show that the cracks at the anchorage interface would develop and expand rapidly under this path, and the cumulative damage to anchorage structures is primarily caused by repeated residual deformation, periodic opening-expanding-closing of internal cracks, and impact vibration resulted from large-scale cyclic loading and unloading. Compared with the results under single pull-out stress, the ultimate loads of the anchorage structures bonded by H and S materials are reduced by 30.8% and 45.5%, respectively, and the radii of inner damage are increased by 1.64 and 1.67 times, respectively, showing a significant decrease in the bearing capacity of anchorage structures under cyclic loading and unloading. The anchorage structures bonded by these two materials have more prominent brittleness and weaker post-peak bearing capacity than those bonded by resin anchoring agent. Therefore, the balance between bonding strength and brittle-plastic extension characteristics shall be fully considered for the selection of anchoring materials. Five failure modes of anchorage structure are summarized: failure of the bolt-anchoring material interface, failure of the anchoring material-surrounding rock interface, fracture of the anchoring material, fracture of the bolt, and integral bulging of the anchorage structure. Besides, under the action of stress disturbance, the anchorage structure of bolt group can mobilize adjacent bolts to restrain the continuous damage and bearing capacity attenuation of the middle bolt, thus guaranteeing the overall safety and stability.
Highlights
-
Based on FBG and AE, the influence mechanism of stress path and anchorage material on the damage and bearing performance of anchorage structure is clarified.
-
The repeated residual deformation and shock effect are the key factors causing the cumulative damage to the anchorage structure.
-
Failure modes of anchorage structure under cyclic loading and unloading and the coordinated bearing characteristics of group anchors are revealed.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The anchorage structure is one with a certain bearing capacity formed by the interaction of surrounding rock-anchoring material-anchor bolt (cable). Three kinds of medium contact and bond with each other through anchoring material, forming two anchorage interfaces, i.e., surrounding rock-anchoring material interface and anchoring material-bolt interface (**g et al. 2020; Zhan et al. 2020; Yang et al. 2021). The bonding performance of anchoring materials greatly affects the bearing capacity and stability of the anchorage structure (Huang et al. 2021; Pan et al. 2021a; Gao et al. 2015). Besides, in the tunneling process of coal mine roadway, due to the periodicity of tunneling disturbance and roof caving disturbance in goaf, the cyclic stress loading and unloading causes continuous damage to the anchorage structure, leading to a gradual decrease of its bearing capacity, which brings great challenges to the roadway support (Kang et al. 2020, 2018; Pan et al. 2021b; Zhang et al. 2021; Wang et al. 2021a). Therefore, in order to ensure the safety and reliability of the anchorage structure of the mining roadway, it is of great practical significance to carry out research on the damage and bearing capacity attenuation laws of the anchorage structure under cyclic loading and unloading of different anchoring materials.
The damage tests of anchorage structures under cyclic loading and unloading mostly focus on rock mass rupture, durability testing of support members, and damage evolution of anchorage structures under different working conditions. Many scholars use MTS, SHPB, true triaxial testing machines or self-developed devices to carry out cyclic loading and unloading tests on different types of rock masses (Li and Gong 2021). They have concluded that in the cyclic loading with the controlled strain, the upper and lower limits of stress, stress ratio and stress amplitude are the main factors affecting the volumetric strain of salt rock (Wang et al. 2013; Xu et al. 2015), and the increase of load-holding time under discontinuous cyclic loading leads to a significant increase in the number and diameter of pores in the coal specimens (**ang et al. 2021). A drop hammer type test device or SHTB (Spit-Hopkinson Tension Bar) system has been developed to test the dynamic response and durability of some energy-absorbing bolt-cables or those with constant resistance under the cyclic loading (Tao et al. 2021; Jiao and Ju 2021). In addition, by changing the parameters such as maximum load, load amplitude, the diameter of reinforcement, concrete quality and bonding length, it is proved that the influence of cyclic disturbance load on the slip and bonding strength of anchoring reinforcement is similar to the deformation and damage of non-reinforced concrete (Rehm and Eligehausen 1979). The dynamic response characteristics of anchorage systems with different bolt diameters under cyclic disturbance load are studied through the pull-out test of steel tube. It is found that the anchorage system under the cyclic mode has the characteristics of “deformation memory” and rheological properties (Feng 2017; Feng et al. 2018). The anchorage structures composed of anchoring matrixes with different strengths are constructed from similar materials and anchoring agents, and the cyclic disturbance load tests are carried out. The results show that the ultimate bearing strength of anchorage structure is closely related to factors such as cycle frequency, cycle amplitude, matrix strength and whether a prestressed support is adopted (He 2018; Jiang et al. 2021; Li et al. 2022). At the same time, some scholars pointed out that the post-peak load of the anchorage body for the soft rock roadway features multiple peak values. With the gradual strength weakening of the anchorage bearing structure, the dilation slip of the internal rock mass and the inward displacement of the outer boundary increase gradually. Parameters such as bolt diameter, row spacing between the bolts, lithology and confining pressure of pre-tightening force all have a great influence on the failure of the anchorage structure (Zhu 2019; **e et al. 2017). On the study of mechanical action relationship and shear slip failure characteristics of the anchorage structure interface, many scholars have achieved fruitful results by theoretical analysis and numerical simulation. For example, the shear stress at the anchorage interface is exponentially distributed; the shear stress around the anchorage body is unevenly distributed along the bolt length in the non-cohesive soil layer (Ostermayer and Scheele 1978); the peak load of the bolt is not synchronized with the peak stress at the interface; the displacement of the anchorage interface corresponding to the peak bonding force is small, while the displacement corresponding to the peak load is large (Serrano and Olalla 1999); the stress concentration is related to the elastic modulus; the deformation of the bolts in the anchorage structure is not the same under different pre-tension conditions; the peak load on the bolt increases with the increase of water-cement ratio and anchorage length (Hoien et al. 2021); the environmental humidity also affects the bearing capacity of the anchorage structure. Numerical simulation is able to obtain the shear slip characteristics and stress distribution characteristics of the anchorage structure from a more microscopic point of view (Yan et al. 2019). During the above tests, strain gauges were used to collect the changes of axial force inside the bolt, and the shear force at the anchorage interface was further derived. The pull-out force and axial force of the bolt-cable are analyzed according to the pull-out instrument and the dynamometer, but its accuracy is poor, compared with other methods. As a new sensing technology, fiber Bragg grating (FBG) technology has attracted the attention of many domestic and foreign scholars (Feng et al. 2021; Madrigal et al. 2020; Wang et al. 2020a), including those engaged in the mining industry, due to its advantages such as inherent safety, corrosion resistance, electromagnetic interference resistance and easy quasi-distribution. For example, it is used to study the settlement and deformation of rock strata on the test stope (Chai et al. 2013), and to develop FBG intelligent anchor plate for monitoring the force on the end of bolt (Fang et al. 2020). To sum up, the previous researchers have done a lot of work on the damage of the anchorage structure, including rock mass damage, durability or impact resistance of the supporting structure, cyclic loading of anchorage structure under single pull-out and various working conditions (different bolt diameters, anchoring matrix strength, cyclic loading parameters and whether applying prestress force, etc.). But the comparative analysis on the damage and bearing capacity attenuation laws of anchorage structures with different bonding materials under the stress path of cyclic loading and unloading based on FBG sensor is relatively rare.
Therefore, in this paper, on the basis of summarizing the previous research results and experience, the MTS universal testing machine is used to test the basic performance of the anchoring material; based on the FBG sensor, the peak pull-out load and axial force variation characteristics of anchorage structures with different anchorage materials are obtained; the influence mechanism of loading path and anchoring materials on the bearing capacity of anchorage structure is revealed, and the failure mode of anchorage structure under cyclic loading and unloading stress path is clarified in combination with the field situation. Finally, the bearing characteristics of bolt group anchorage structures with different anchoring materials are verified and analyzed based on ANSYS (Li et al. 2013) numerical simulation software.
2 Materials and methods
2.1 Specimen preparation
In this paper, a total of three anchoring materials are used in the tests. The first one is the traditional anchoring agent, and the other two types are new cement-based grouting materials, which are used to realize the prestressed full-length anchorage or modified grouting reinforcement. Among which, the H material is an inorganic single-component grouting material with a water-cement ratio (W/C) of 0.28, and the S material is an inorganic two-component grouting material with a water-cement ratio (W/C) of 0.6. The specimens for the anchorage parameters test are prepared according to the requirements of standard rock specimens. After curing the specimens for 28 days, the uniaxial compressive strength, shear strength and tensile strength of the specimens are obtained respectively. The relevant parameters are shown in the Table 1.
Due to the limitations of on-site sampling and processing of large rock blocks, similar simulation materials are used for the preparation of the anchoring matrix. The anchoring matrix materials consist of river sand, cement and water, with 425 Portland cement adopted. The grain size of river sand is below 10 meshes, and common tap water is used. After pouring 70 * 70 * 70 mm standard cube specimen and mechanical strength test, appropriate mixing ratio is selected as 10:6:3 (cement:river sand:water); the average compressive strength is 30.21 MPa, and the anchoring matrix with the size of 300 * 300 * 300 mm is poured according to the ratio. A 30 mm hole is reserved in the middle for filling the anchoring material and installing the bolt. A φ22 mm × 1000 mm equal strength fine thread steel bolt with the yield strength of 600 MPa is adopted. The anchor bolt is slotted along the micro-plane side of the section (size 2 × 2 mm), in which FBG sensors are installed. Three FBG sensors are arranged for each bolt, which are located at 100 mm (FBG1), 200 mm (FBG2) and 400 mm (FBG3) from the bottom end of the anchorage, respectively. Before sticking the sensors, alcohol and acetone are used to clean the grating bonding area at the sensor end, and then the loose casing is peeled off. The air cylinder is used to clean the groove in advance to make sure there is no other medium in the middle as far as possible. The FBG sensors are pasted in the groove by special glue (TSK-36) to ensure that the sensors are tightly bonded to the bolt. The FBG sensors are sealed with epoxy resin sealant. After embedding the sensors, the lead end is fixed with the adhesive tape to prevent brittle fracture of FBG. After pouring and curing the anchoring matrix and arranging the FBG anchor bolt, the anchorage structure is prepared with the anchoring material. The preparation process of the specimen is shown in Fig. 1.

Preparation of anchor structure specimen
2.2 Test method and plan
The test device consists of three parts: the NJ2-2D bolt-cable pull-out test system, the PCI-2 acoustic emission test system and the X-25 FBG demodulator. The NJ2-2D bolt-cable pull-out test system adopts full hydraulic drive, which can apply force on the bolt, the anchorage section, the nut and the tray in a synchronous way, inspect the mutual matching of bolt-cable and its supporting components. The test results can be automatically analyzed and stored. The PCI-2 acoustic emission test system can accurately characterize the deformation and damage evolution characteristics of the specimens. The acoustic emission information can fully reflect the internal damage of the structure (Toubal et al. 2020; Petruzalek et al. 2020; Vilhelm et al. 2017). The acoustic emission sensors are fixed on the surface of the anchorage structure specimens by magnetic base, with acquisition frequency set to 2.5 MHz and the amplitude threshold set to 40 dB, so as to shield the interference of external noise signals and ensure that the acoustic emission acquisition time is synchronized with the loading time. The X-25 FBG demodulator reflects the changes of axial force and micros-strain of bolt and anchorage interface during loading by analyzing the wavelength change of FBG. During the pull-out test, the specimen was placed within the pull-out scope, with suitable nut fixture adopted. After pre-tightening, the bolt-cable pull-out test system began to apply the load to start the test. The load is applied in a cyclic way. Before doing this, it is necessary to determine the ultimate pull-out force of the anchorage structures bonded by different materials by single pull-out test, so as to avoid that the anchorage structure fails in advance due to too large ultimate load. At the same time, the test results can be used as control group data for comparative analysis. In the test, equal-amplitude cyclic loading method was adopted. According to the results of single pull-out test, the specific loading scheme was determined as follows: first, 25 kN load was applied on the specimen, and then the first loading cycle was carried out, with the cycle amplitude of 40 kN, the upper and lower limit values of 5 kN and 45 kN, the number of cycles of 50; then the upper and lower limits were increased by 5 kN in each loading cycle until the specimen was damaged. The test process is shown in Fig. 2.

Schematic diagram of test equipment and process
3 Result
3.1 Calibration of FBG force measuring bolt
To ensure the accuracy of test monitoring data, it is necessary to calibrate the FBG force-measuring bolt to determine the sensitivity and other correlation coefficients and the calculation formula of the bolt axial force. During the experiment, the method of equal gradient axial force loading was adopted. The NJ2-2D bolt-cable pull-out test system was used to apply pressure of 0, 10 kN, 20 kN, 30 kN, 40 kN, 50 kN, and 60 kN to the force-measuring bolt. The wavelength values of 3 gratings under different axial forces were recorded. The relationships between the wavelength change of the force-measuring bolt and the different axial forces were compared. The calibration results are shown in Table 2 and Fig. 3.

Calibration and fitting analysis of FBG force measuring bolt
From the calibration data in Fig. 3, it can be seen that, with the increase of the applied axial force, the wavelength values of channels 1–3 on the FBG force-measuring bolt exhibit an increasing trend. It is concluded from the figure that the linear fitting degree of 3 gratings are all greater than 0.99, which is close to 1. This indicates that the linear fitting degree was very high, which is essentially consistent with the theoretical derivation. Considering the difference between the grating sensitivity and temperature sensitivity in different channels, the formula of the bolt axial force is deduced by taking the axial force of the bolt as the independent variable and the grating wavelength as the dependent variable. The calculation formula of the axial force of the bolt considering the temperature compensation is expressed as follows:
Therefore, we get:
According to the calibration test results of the grating force measuring bolt, it is concluded that the average sensitivity coefficient G of the three channel FBG sensor is 0.01627 nm/kN. During the test, the micro strain of the sensor can also be used to characterize the stress state of the anchor structure. The recording method adopts the relative wavelength measurement method: \(\mu \varepsilon = (\lambda_{i} - \lambda_{0} *1000/1.2)\). The two methods can be used to obtain the pull-out failure test data of the subsequent anchor structure.
3.2 Strength threshold under single pull-out loading
Under single pull-out loading condition, the average peak pull-out strengths of the anchorage structures bonded by three materials are: anchoring agent—60 kN, H material—86 kN, S material—77 kN. Figure 4 shows the highest pull-out loads of the anchorage structures bonded by three materials, respectively. As shown in the figure, the law of pull-out displacement-load curve of H material is similar to that of S material, which is also a cement-based material. The ultimate bearing capacity of the anchorage structure bonded by H material is 86kN, which is slightly higher than that bonded by S material. After analysis, the reasons may be: I. Basic strength of material: It is known from the basic performance test of the anchoring material above that the relevant mechanical properties of the H material are higher than that of the S material; II. Pouring error of specimen: The S material is an inorganic two-component grouting material. It is difficult to ensure the complete chemical reaction between components, resulting in unstable anchoring strength. Therefore, the difference between the results of two pull-out tests is relatively large. The anchoring agent is relatively viscous. It features the fastest chemical reaction time and the shortest solidification time. It has obvious plasticity characteristics. However, in the process of mixing and installation, if the bolt and the reserved borehole are poorly aligned, anchoring voids may be created, resulting in low anchoring force. According to the data analysis, three pull-out displacement-load curves of the anchorage structures with anchoring agent can be divided into three stages. The first stage is the curve rising stage, the second stage is the elastic rising (yield) stage, and the third stage is the post-peak residual stage. After comparing the three materials, the H material has the highest pull-out load and the anchoring agent has the lowest pull-out load. However, in the post-peak residual stage, the anchoring agent shows significantly superior post-peak bearing capacity. H material and S material basically have no post-peak residual stage, showing obvious brittleness characteristics. For the three materials, the maximum energy of acoustic emission ringing count appears at the maximum pull-out load of the anchorage structure. The failure of the anchorage structure specimens leads to entering the post-peak stage or direct loss of bearing capacity.

Stress-time curve and axial force distribution of rod body of single pull-out stress path
Figure 4d–f show axial force distribution of the bolt at different positions of the anchorage structures bonded by three materials according to the wavelength change of the FBG sensors. It can be seen from the figures that the axial force distribution of the bolt shows no obvious regularity in the early stage of the single pull-out test, but when the pull-out force reaches a certain level, the axial force of the bolt in different positions of the anchor structures bonded by three materials shows the same trend and law, that is, FBG3 (free section) > FBG2 (shallow anchorage section) > FBG1 (deep anchorage section). After analysis, the reason why the axial force of the bolt is unevenly distributed in the early stage of pull-out is related to the grating bonding technology. Since the grating is manually bonded, it is very likely that the grating will fall into a compressed or stretched state in the initial stage during the bonding and pressing process. Taking Fig. 4a as an example, the initial micro-strains of the three FBG channels in the early stage of the anchoring agent-anchorage structure pull-out test are all of negative values, which means that the three gratings have different degrees of compression in the initial stage. With the continuous increase of the pull-out force, under the action of the bonding force of the anchorage interface, the free section of bolt first responds and tensile deformation appears, followed by the front part of the anchorage section, and finally the deep part of the anchorage section. The grating deformation is synchronized with the bolt deformation, gradually changing from compression to tension. When the pull-out force is greater than 48kN, the initial compression of the grating is not sufficient to resist the difference of the tensile amount at different positions under high pull-out force. Subsequently, the tensile deformation of the grating at the three channels shows obvious regularity. The axial force of the bolt decreases gradually from the free section to the deep part of the anchorage section. The yield and post-peak bearing stage of the anchoring agent-anchorage structure, the entire test stage of the H material-anchorage structure and the elastic tensile stage of the S material (tensile exists in the initial stage of FBG1) all conform to this law.
3.3 Interface damage and bearing capacity attenuation of anchorage structures under cyclic loading and unloading
The traditional anchoring agent test under the cyclic loading and unloading stress path has been carried out by many researchers, and the functions of bonding and grouting reinforcement cannot coexist at the same time due to its own nature. Therefore, in this paper, the interface damage and bearing capacity attenuation tests of anchorage structures under cyclic loading path are only carried out for two anchoring materials such as H and S materials. Figure 5 shows the stress–strain curve, FBG sensor curve and acoustic emission (AE) event characterization diagram of H and S materials under the cyclic loading and unloading paths, and the micro-strain curve is highly consistent with the cyclic loading and unloading stress change curve. Significant differences exist in the micro-strain values of FBG monitoring points at different positions. The micro-strain at FBG3 is the largest, followed by micro-strain at FBG2 in the shallow part of the anchorage section, and the micro-strain at FBG1 in the deep part of the anchorage section is the smallest. The micro-strains of the three monitoring points for the H-material anchorage structure are 2295 με, 1467 με, and 718 με, respectively, while the micro-strains of the three monitoring points of the S-material anchorage structure are 1587 με, 1082 με, and 416 με, respectively. The axial force of the free section for the anchorage structure is the largest in the pull-out state. The anchorage interface at the anchoring end is the bearing body of load and the first main body of stress transmission of anchorage section, the anchoring end first deforms and breaks after the force is applied, and the load transmission progresses layer by layer from shallow part to deep part. When the upper limit of load in the initial stage of cyclic loading and unloading is small, the stress of the anchorage structure is mainly borne by the anchorage interface at the end of the anchorage section. With the continuous increase of the upper and lower limits of the cyclic loading and unloading, the stress of the anchorage section is no longer concentrated at the anchoring end, and sufficient anchoring force is provided through the increase of the effective anchorage interfaces to cope with the enhanced external load. Finally, the upper limits of the previous cycle loading and unloading peak value is taken as the failure load of the anchorage structure.

Stress characteristics of anchorage structures with different materials under cyclic loading and unloading stress path
According to the micro-strain variation trend of the three FBG sensors for H–S materials, the micro-strain difference of the three sensors for H material remains basically unchanged under the cyclic loading stress path, indicating that only crack initiation occurs inside the anchorage interface for H material during the cyclic loading and unloading process, without large-scale connected failure, which can be verified in the range of the AE signal below. Due to the small amount of damage and failure, the H-material anchorage structure continuously accumulates elastic energy during the cyclic loading and unloading process, and the number of micro-crack increases. Finally, a large number of cracks connect each other with a relatively high load, and the anchorage structure is instantly destroyed, directly losing all bearing capacity. However, the micro-strain of the three FBG sensors for S material shows a trend of gradually approaching each other under the action of cyclic loading and unloading, indicating that the process of crack initiation and gradual connection occurs inside the S-material anchorage structure under the cyclic loading stress path. With gradual damage of anchorage interface, the peak value of the anchoring force gradually shifted to the deep part of the anchorage structure, and the damage and debonding of the anchorage interface made the three FBG sensors gradually close to the same stress environment, and the axial force of the bolt at the final monitoring point gradually moved closer to each other, and the damage range of the anchorage structure gradually increased. This can also be verified when the range of the AE signal is larger during the failure process of the anchorage structure of S material. The cumulative damage of the anchorage interface and the gradual reduction of the bearing capacity eventually lead to the overall failure of the S-material anchorage structure under a low load after a cycle is completed. Although both H and S materials show significant brittleness characteristics compared with anchoring agents in a single pull-out process, if only H material is compared with S material, the cumulative damage process of S material under cyclic loading and unloading reflects a degree of plasticity, which can be seen from the fact that it still has a low post-peak bearing capacity in the end. The H-material anchorage structure bears cyclic loading and unloading for nearly 200 times, with the failure load of 59.5 kN; While S-material anchorage structure bears the cyclic loading and unloading for less than 50 times, with the failure load of 42 kN. The failure loads of the above two have decreased significantly by 30.8% and 45.5%, compared with the failure load under the single drawing, and the failure mode still shows obvious brittleness characteristics under the cyclic loading and unloading stress path, and the post-peak bearing capacity is poor.
The occurrence of vibration events in the monitoring process of the acoustic emission system is closely related to the internal damage of the anchorage structure. The AE ringing count refers to the number of times the ringing pulse signal exceeds the threshold value. A positive correlation exists between the ringing count and the internal damage degree of the anchorage structure. From the beginning of cyclic loading and unloading to the 25 kN, the AE ringing count is relatively random due to the coincidence of the compaction of the original cracks in the anchoring matrix and the fractured cracks initiation at the anchorage interface, and responds violently in 0–500 s, this shows that the internal energy of the anchorage structure is continuously accumulated and released along with the new cracks initiation and the original cracks propagation during the cyclic loading and unloading process. With the increasing number of cycles, the AE ringing count will obviously increase every time the upper limit of cycles is increased, and acoustic emission events connect the whole test process, indicating that the specimens for anchorage structure continue to accumulate and lead to irreversible damage during the cyclic loading and unloading process. Under the action of the load, the tiny holes and cracks in the original anchorage structure are compacted. With the continuous increase of the load, the contact surface between the anchoring material and the transverse rib of the bolt or the surrounding rock will lead to new cracks under the action of tension, and the shearing of the anchorage interface will take effect. After the failure of the anchorage interface is increased to a certain extent, the mechanical interlocking effect between the transverse ribs of the bolt and the anchoring material gradually dominates. In summary, the residual bearing capacity of the cement-based anchoring material under the cyclic loading and unloading stress path is poor. From the cracks initiation to the macroscopic damage in the samples of anchorage structure, the bearing capacity of the anchorage interface is continuously reduced under the cumulative damage, leading to the overall failure of the anchorage structure in the end even with low stress.
3.4 Failure and damage of anchorage structures under cyclic loading
By comparing and analyzing the AE signal and the failure mode of the sample of anchorage structure, the damage and failure process of the anchorage structure under the cyclic loading and unloading stress path can be clarified from another perspective. Figure 6 shows the three-dimensional distribution characteristics of acoustic emission events and the failure modes after cyclic loading and unloading of two-material anchorage structures. In order to compare the internal damage characteristics of the anchorage structure under single pull-out and cyclic loading and unloading comprehensively, the previous failure diagrams in the single pull-out process are put here together. Figure 6a and c represent the AE signal distribution of the H–S-material anchorage structure under single drawing, while Fig. 6b and d are the AE signal distribution of the H–S-material anchorage structure under cyclic loading and unloading. It should be noted that the small ball in the figure represents the acoustic emission response event, the positioning of the small ball represents the specific location of the damage event, and the size of the anchoring matrix is 300 * 300 * 300 mm. Due to the size effect on boundary, the acoustic emission response events are mainly distributed in 200 * 200 * 200 mm centered on the bolt, so the size in the figure is drawn as 200 * 200 * 200 mm. According to the figures, the damage of the anchorage structure mainly revolves around the bolt and the anchorage interface in the whole cyclic loading and unloading test process, spreads from central bolt of the anchorage structure to the surrounding rocks from the perspective of positions, and gradually expands from the anchorage interface to the overall failure from the perspective of structure.

Failure characteristics of anchorage structures with different materials under cyclic loading and unloading stress path
The failure modes for the samples of two-material anchorage structure include crack propagation, anchoring end failure, “line-shaped” split, cross-split, large-scale rock mass fracture, anchorage interface debonding, and anchoring material damage. The damage radius of the H-material anchorage structure is 70 mm under single pull-out condition and 115 mm under cyclic loading and unloading, while the damage radius of S-material anchorage structure is 75 mm under single pull-out condition and 125 mm under cyclic loading and unloading. This corresponds to the different micro-strain change trends of FBG sensors at different positions of the two-material anchorage structures, and the incidence of damage events increases significantly under the cyclic loading and unloading stress path. By comparing and analyzing the ultimate failure strength of the anchorage structure with the two loading methods, it can be concluded that the damage radius and ultimate failure strength is negatively correlated. During the cyclic loading and unloading process, many distributed shear slip surfaces are initiated and propagated at the anchorage interface. The continuous increase of the number of cycles leads to the mutual connection of the shear-slip surfaces, and the sliding friction of the interface weakens the shear dilation effect. The accumulation of damage degree directly leads to the reduction of bearing capacity. To sum up, the comparative analysis shows that the H material performs relatively well under the resistance of cyclic loading and unloading stress disturbance, but the bearing capacity declines significantly.
4 Discussion
4.1 Influence mechanism of cyclic loading and unloading paths and anchoring materials on the bearing capacity of anchorage structures
For the control of surrounding rock of coal mine roadway, the control system with bolt-cable support at its core is the “last line of defense” to ensure the safety and stability of most roadways. It will be subject to stress disturbances under different paths within its service period. Cyclic loading and unloading of advance abutment pressure caused by periodic roof breaking and caving in mining face is one of the main paths of stress disturbance of anchorage structures (He et al. 2021). With the mining of the working face, the O-X shaped breakage of the high-level hard roof in the goaf leads to large structural movement, and the rock stratum collapses and turns over, releasing a large amount of energy, forming advance abutment pressure and lateral bearing pressure in front of and on the side of the coal wall (Behera et al. 2021). According to the physical simulation test for the stope completed by the author and the theory of mine pressure, the roof caving in the goaf is divided into first weighting and periodic weighting. In general, the first weighting step is relatively large but the periodic weighting step is relatively short and stable. The main roof collapses, the caving zone above the coal wall and the goaf moves forward continuously, leading to continuous forward movement of the area affected by the bearing pressure. The stressed areas of the anchorage structure are divided into three parts by the study on axial force monitoring of on-site FBG force-measuring bolt, namely the stable area, pressurized area and the peak area (Wang et al. 2020b). The cyclic loading and unloading stress path caused by the breaking and caving of the working face roof and the stress of the anchorage structure are shown in Fig. 7.

Disturbance path of cyclic loading and unloading stress of anchorage structure in coal mine
According to the three stages of stress–strain curve of the above anchorage structure, curve rising, elastic deformation, plastic yield and post-peak bearing stages exist in the failure process of anchorage structure. When the upper limit load of cyclic loading and unloading does not exceed the critical point of elastic deformation of anchorage structure, no matter how many cycles are applied, the specimen cannot be destroyed. When the upper limit load of cyclic loading and unloading exceeds the critical point of elastic deformation but does not exceed its yield and pull-out force, each cycle will be accompanied by an amount of unrecoverable residual deformation, and the growth rate of residual deformation will gradually decrease with the increase number of cycles. However, the residual deformation will gradually accumulate, so the anchorage structure is characterized by cumulative damage. Compared with single drawing, the anchorage structure is easier to be damaged under cyclic loading and unloading, and the internal cracks of the anchorage structure gradually lead to creak initiation and crack propagation under single pull-out condition, and the whole process is a gradual damage, giving full play to the optimal bearing capacity of the anchorage structure. The bolt is pulled out for a relatively large displacement in a short time due to the huge difference between the upper and lower limits pull-out forces in a short time during cyclic loading and unloading, and the cracks at the anchorage interface instantly lead to creak initiation and crack propagation. At this time, the anchorage structure has been damaged, and the bearing capacity has decreased. Repeated residual deformation leads to the aggravation of cumulative damage, the damage of the anchorage interface and the anchoring matrix gradually increases, and the bearing capacity continuously decreases. When entering the next gradient cycle, the peak bearing capacity of the anchorage structure has decreased in the loading and unloading process of the last gradient cycle, leading to the failure of the anchorage structure in the end even with a low pull-out force because of cumulative damage. In addition, the cyclic loading and unloading process will inevitably induce the repeated opening, expansion and closing of the internal cracks of the anchoring ring, which will consume more energy than in the single pull-out process. Meanwhile, the large-scale cyclic loading and unloading process will bring high impact vibration and elastic energy accumulation to the anchorage structure system. Whether it is short-term rapid crack propagation or impact vibration, it is not very friendly to H and S anchoring materials with obvious brittle characteristics, which is easy to break apart under the action of instantaneous impact. Therefore, according to the test results of single drawing, cyclic loading and unloading, traditional anchoring agent and two new grouting anchoring materials, the selection of anchoring materials of the anchorage structure should comprehensively consider the characteristics of bonding strength and brittle-plastic extension in order to better adapt to the cyclic stress disturbance environment of coal mine roadway, achieving the balance and organic unity of strength and deformation.
4.2 Failure mode of the anchorage structure combined with field engineering practice
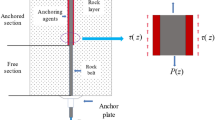
The control effect of the anchorage structure on the surrounding rock deformation of the roadway is mainly reflected in the following two: First, tensile force on supporting body such as bolt-cable (Sun et al. 2022). Second, bonding force and mechanical interlocking formed by the contact between the anchoring material and the surrounding rock and the bolt-cable (Liang et al. 2022), of course, the anchorage structure in the field will bear a degree of shear stress caused by the slip and dislocation of the rock layer besides the tensile force (Jiang et al. 2022). The pull-out testing was used in the test process, so the subsequent analysis was mainly carried out from the perspective of tensile force. Whether it is a prestressed bolt or a non-prestressed bolt, the supporting effect of the anchorage structure requires a degree of deformation of the surrounding rock for an optimum level. When the two reach a balance point, the surrounding rock will continue to deform under the influence of mining stress, and the supporting effect of the anchorage structure will act on the surrounding rock mass in a wider range and restrain its deformation. According to the failure and damage analysis of the above anchorage structure under cyclic loading and unloading, the failure mode of the anchorage structure in this test is mainly manifested in one or more of the following factors: failure of the bolt-anchoring material interface, surrounding rock failure and fracture of anchoring material and surrounding rock interface, and the anchoring material breaking and separating. However, considering the single axial tensile loading and size effect used in the test, the shear stress and the large structural deformation of the surrounding rock are not considered. Combined with field engineering practices (Wang et al. 2021b; Liu et al. 2019; Huang et al. 2020), the failure of the anchorage structure should also include the following types: bolt fracture and integral bulging of anchorage structure. The failure state is shown in Fig. 8.

Failure mode of anchorage structure under cyclic loading and unloading stress path
The debonding failure of bolt-anchoring material interface and anchoring material-rock mass interface are closely related to the properties of anchoring material, and the bonding force between the material and surrounding rock mass or bolt determines the debonding position of anchorage interface. When the debonding failure of bolt-anchoring material interface occurs, it means that the bonding strength between bolt and anchoring material is poor at this time. With the gradual increase of the axial force of bolt, the relative displacement between bolt and anchoring material gradually increases, resulting in the debonding of interface. It can happen in unreasonable design and processing of rod surface structure, the existence of oil stains and rust on the surface of the bolt during installation, or the insufficient moderate mixing and uneven bonding of the surrounding anchoring materials. The debonding failure between anchoring material and surrounding rock interface is the most common failure mode of anchorage structure in the test, which shows that the bolt and anchoring material are pulled out integrally, and no obvious relative displacement between the bolt and anchoring material exists, because there are many transverse ribs on the surface of the supporting bolt used in coal mines. First, the transverse ribs increase the contact area between the anchoring material and the bolt. Second, in the initial stage of stress deformation of the anchorage structure, the interior of the anchoring material is in the micro-crack initiation stage. At this time, the adhesive property of the anchoring material plays a leading role. With the increase of the interface slip, the mechanical interlocking effect between the transverse rib of the bolt and the anchoring material gradually appears, which makes the interface between the bolt and the anchoring material difficult to slip off. At the same time, many cracks and holes exist in the rock mass on site, easily lead to the loss of the anchoring material during the rotating and installation of the bolt, and greatly reduce the bonding force of the anchoring material-surrounding rock interface, resulting in the debonding failure of the anchoring material-surrounding rock interface under the action of large tensile force. The surrounding rock failure mostly coexists with other failure modes of anchorage structures, and can happen in poor and broken rock mass due to its low strength and bad bonding effect with anchoring materials as well as low anchorage property. In the process of surrounding rock rupture, the bonding force of anchorage interface decreases synchronously, which eventually leads to the failure of anchorage structures. Here, the surrounding rock failure is combined with the failure mode of debonding of surrounding rock-anchoring materials interface. The slip breaking of anchoring material is mainly determined by the properties of anchoring materials, as shown in the test results. Compared with traditional anchoring agents, the peak pull-out load of H and S materials is higher, but the post-peak bearing capacity is poor, showing strong brittleness characteristics. Under the cyclic loading and unloading stress path, a large number of tension-shear cracks appear inside the anchoring ring and quickly connect, resulting in the failure of the anchorage structure. Secondly, three diameters (drilling diameter, anchor rod diameter and resin anchoring agent diameter) are mismatched, the drilling hole size is unreasonable, and the anchoring ring that is too thick or too thin may lead to failure of slip breaking of anchoring material. However, fracture of bolt is difficult to happen in laboratory pull-out testing, mainly because of the high strength of the bolt and no shear stress. However, it is common to see the shear, slip and dislocation of layered rock mass (Zhao and Zhang 2017), or the bolt is pulled off by the instantaneous impact load in the real situation of coal mine roadway (**e et al. 2019; Wang et al. 2020c). The last failure mode of the integral bulging of the anchorage structure only appears in the field, mostly in deep well high-stress soft rock, and the anchorage thickness of the anchor bolt foundation is insufficient. Under the continuous deformation and dilation of surrounding rock, the whole anchorage structure and large-scale surrounding rock mass are extruded as a whole. Therefore, considering the scene of field support practice, the supporting strength and bearing capacity of the overall anchorage system for bolt group should be effectively improved when considering the selection of anchoring materials.
4.3 Verification of load-bearing characteristics for anchorage structure of bolt group on the basis of finite element analysis
As mentioned above, an experimental study on the load-bearing characteristics of a single-bolt anchorage structure is carried out. At the same time, it is suggested that effectively improving the supporting strength and bearing capacity of the overall anchorage system of the bolt group while the selection of anchoring materials should be considered. Therefore, this section uses ANSYS finite element numerical simulation software to verify the load-bearing characteristics of the anchorage structure of the bolt group with two anchoring materials. The model is 4000 * 4000 * 2000 mm in dimension, with 9 anchor bolts arranged in the upper part, the drilling hole diameter of 300 mm, the anchor bolt diameter of 22 mm, and the anchoring ring thickness of 8 mm. Parameters of H and S anchoring materials are selected according to the measured physical properties and damage constitutive parameters as stated above. The surrounding rock is set with CONC-30MPa concrete model parameters, and four different materials, namely ComH, ComS, WY and bolt, which are two different anchoring materials, surrounding rock materials and bolt materials, and 80 kN unidirectional pull-out force is applied to each bolt. The numerical model is shown in Fig. 9, and the material parameters are shown in Table 3.

Finite element model of anchorage structure and cloud diagram of damage and failure degree at different anchorage depths
Figure 9 shows the strain gradient nephogram of finite element model for bolt group anchorage structure at different position sections along the direction of anchoring depth after loading of finite element model. The upper and lower parts of the figure show the stress and deformation states of H and S anchoring materials as mediums, respectively. It should be noted that the strain value from 0 to 1 represents the change from no deformation to gradual damage and failure of the anchoring member, and “1” represents the complete damage and failure of the finite element model of the anchorage structure. As shown in the figure, the material property difference of the anchoring materials as mediums has a ripple effect on the local strain value, and the strain nephogram extends from the middle bolt to the surroundings, and the middle bolt is deformed and destroyed most seriously when it is subjected to pull-out load. Because of the poor mechanical properties of S material, the S material as the anchoring medium fails earlier than H material in the process of load transfer. In the process of bolt drawing, the axial force of the bolt body shows different characteristics at different anchoring depths, and the axial force increases as the bolt gets closer to the anchoring end. By monitoring the deformation characteristic profiles inside the finite element model of the anchorage structure at three typical positions, it can be seen that the deformation of the anchorage structure gradually decreases with the increase of the anchoring depth (the shallow part is 500 mm deep from the anchoring end, the middle part is 1500 mm from the anchoring end, and the deep part is 2000 mm from the anchoring end). Taking the strain value of the middle anchor bolt as an example, the strain value is 0.89 when the anchoring depth is 500 m, 0.67 when the anchor depth is 1000 mm, and 0.44 when the anchor depth is 1500 mm, and the strain value decreases gradually, which means that the anchorage body near the end is destroyed first under the pull-out load, and gradually spreads to the anchoring depth, also verifies that the failure of the specimen always starts from the shallow part to the deep part of the anchorage body in the physical model test. Figure 10 shows the fitting curve of interface shear stress variation obtained by Path point monitoring of the anchorage interface. In the pull-out state, the shear stress of the anchorage interface increases rapidly when it is close to the anchorage end face, indicating that the initial bearing capacity of the anchorage interface is provided by the interface bonding force in the shallow or near-shallow layer no matter in the anchorage structure of a single bolt or a bolt group. With the increase of the anchoring load, the failure gradually develops from shallow part to deep part. The peak value of anchorage force keeps moving to the deep part. In fact, the anchoring load gradually changes to the deep interface due to the damage of shallow rock mass, and the cumulative damage of the anchorage interface leads to the continuous attenuation of the bearing capacity. The advantage of anchorage structure of bolt group lies in the mutual restraint of independent anchorage structures. As shown in Fig. 9, while the bearing capacity of the anchorage structure of the middle anchoring member decreases, the bearing capacity of the surrounding anchorage structure will prevent the further damage of the middle anchorage structure. Therefore, before reaching the damage limit, the anchorage structure of bolt group will mobilize the adjacent bolts to restrain the continuous damage and bearing capacity attenuation of the middle bolt under stress disturbance.

Variation of shear stress with anchorage depth
5 Conclusion
-
1.
The peak pull-out load and axial force variation of different anchorage structures are obtained using the FBG sensor. Under cyclic loading and unloading stress path, the failure loads of anchorage structures bonded by H and S materials show values of 59.5 KN and 42 KN after 200 and 50 cycles, respectively. Compared with the single pull-out stress, the ultimate loads are reduced by 30.8% and 45.5%, respectively.
-
2.
The influence mechanism of different loading paths and anchoring materials on the bearing capacity of anchorage structures is revealed. The cumulative damage to anchorage structures is mainly aggravated by repeated residual deformation, periodic opening-expanding-closing of internal cracks, and impact vibration caused by large-scale cyclic loading and unloading. Meanwhile, the AE signal indicates that the internal damage of the anchorage structure increases significantly under cyclic loading and unloading, and the damage spreads along the central anchor to the surrounding rock.
-
3.
The failure modes of anchorage structures under cyclic loading and unloading stress path are divided into five types: failure of the bolt-anchoring material interface, failure of the anchoring material-surrounding rock interface, fracture of the anchoring material, fracture of the bolt, and integral bulging of the anchorage structure. The new anchoring materials show obvious brittle characteristics, thus anchoring materials shall be selected by comprehensively considering the bonding strength and brittle-plastic extension.
-
4.
The bearing capacity of the anchorage structure of the bolt group is verified by ANSYS finite element analysis. The initial bearing capacity at the anchorage interface originates from the bonding force at the interface in the shallow layer. The anchorage structure of the bolt group mobilizes adjacent bolts to restrain the middle bolt's continuous damage and bearing capacity attenuation, thus ensuring overall safety and stability.
Abbreviations
- λ 0 :
-
The original wavelength value of grating (nm)
- λ i :
-
The output wavelength value of the sensor at time i (nm)
- G :
-
The sensor sensitivity coefficient (nm/kN)
- F i :
-
The axial force on the bolt at time i (kN)
- K :
-
The temperature correction coefficient of the sensor (nm/°C) (Small temperature change during the experiment)
- T i :
-
The temperature value at time i (°C)|
- T 0 :
-
The original temperature of grating (°C)
- με :
-
Microstrain
- FBG:
-
Fiber Bragg Grating
- AE:
-
Acoustic emission
- W/C:
-
Water-cement ratio
References
Behera B, Yadav A, Singh GSP, Sharma SK (2021) Assessment of excavation damage and spalling potential at a mechanized longwall face: a numerical modeling study. Geomech Geophys Geo-energy Geo-resour 7:104. https://doi.org/10.1007/s40948-021-00299-6
Chai J, Zhao WH, Li Y, Cui C, Wang DC (2013) FBG monitoring test on settlement deformation of overlaying strata in similar models. J China Coal Soc 38:57–62. https://doi.org/10.13225/j.cnki.jccs.2013.01.009. (in Chinese)
Fang XQ, Liang MF, Li S, Zhang L, Yang HB, **e XP, Yu R, Wu G, Lv JK (2020) Key technologies of multi-parameter accurate perception and security decision in intelligent working face. J China Coal Soc 45:493–508. https://doi.org/10.13225/j.cnki.jccs.YG19.1604. (in Chinese)
Feng XW (2017) Failure mechanism and durability exploration for fully bonded bolting system. Doctoral dissertation, China University of Mining and Technology (in Chinese)
Feng XW, Zhang N, Yang S, He FZ (2018) Mechanical response of fully bonded bolts under cyclic load. Int J Rock Mech Min Sci 109:138–154. https://doi.org/10.1016/j.ijrmms.2018.06.018
Feng DQ, Luo XD, Liu YG, Ma CJ, Qiao XG (2021) Performance improvement of FBG sensors based on the pre-stressed package technique. Opt Fiber Technol 65:102623. https://doi.org/10.1016/j.yofte.2021.102623
Gao FQ, Stead D, Kang HP (2015) Numerical simulation of squeezing failure in a coal mine roadway due to mining-induced stresses. Rock Mech Rock Eng 48:1635–1645. https://doi.org/10.1007/s00603-014-0653-2
He FZ (2018) Study on bearing properties and failure modes of anchors under cyclic load. Master's dissertation, China University of Mining and Technology (in Chinese)
He ZQ, **e HP, Gao MZ, Deng GD, Peng GY, Li C (2021) The fracturing models of hard roofs and spatiotemporal law of mining-induced stress in a top coal caving face with an extra-thick coal seam. Geomech Geophys Geo-energy Geo-resour 7:2. https://doi.org/10.1007/s40948-020-00202-9
Hoien AH, Li CC, Zhang N (2021) Pull-out and critical embedment length of grouted rebar rock bolts-mechanisms when approaching and reaching the ultimate load. Rock Mech Rock Eng 54:1431–1447. https://doi.org/10.1007/s00603-020-02318-6
Huang BX, Zhang N, **g HW, Kan JG, Meng B, Li N, **e WB, Jiao JB (2020) Large deformation theory of rheology and structural instability of the surrounding rock in deep mining roadway. J China Coal Soc 45:911–926. https://doi.org/10.13225/j.cnki.jccs.SJ19.1451. (in Chinese)
Huang SJ, Meng XR, Zhao GM, Li YM, Cheng X, Xu WS, Liu G (2021) Research and performance test of new full-length anchorage material. Adv Mater Sci Eng 2021:1–11. https://doi.org/10.1155/2021/9937751
Jiang YX, Chen HB, Nie X, Tao MX (2021) Experimental study on bond and anchorage of steel bars in precast concrete structures with new-to-old concrete interface. Eng Struct 247:113086. https://doi.org/10.1016/j.engstruct.2021.113086
Jiang YJ, Zhang SH, Luan HJ, Wang CS, Wang G, Han W (2022) Numerical modelling of the performance of bolted rough joint subjected to shear load. Geomech Geophys Geo-energy Geo-resour 8:140. https://doi.org/10.1007/s40948-022-00447-6
Jiao JK, Ju WJ (2021) Burst failure mechanism of roadway anchorage bearing structure under dynamic load disturbance. J China Coal Soc S1:94–105. https://doi.org/10.13225/j.cnki.jccs.2020.1525. (in Chinese)
**g HW, Wu JY, Yin Q, Wang K (2020) Deformation and failure characteristics of anchorage structure of surrounding rock in deep roadway. Int J Min Sci Technol 30:593–604. https://doi.org/10.1016/j.ijmst.2020.06.003
Kang HP, Lou JF, Gao FQ, Yang JH, Li JZ (2018) A physical and numerical investigation of sudden massive roof collapse during longwall coal retreat mining. Int J Coal Geol 188:25–36. https://doi.org/10.1016/j.coal.2018.01.013
Kang HP, Yang JH, Gao FQ, Li JZ (2020) Experimental study on the mechanical behavior of rock bolts subjected to complex static and dynamic loads. Rock Mech Rock Eng 53:4993–5004. https://doi.org/10.1007/s00603-020-02205-0
Li XB, Gong FQ (2021) Research progress and prospect of deep mining rock mechanics based on coupled static-dynamic loading testing. J China Coal Soc 46:846–866. https://doi.org/10.13225/j.cnki.jccs.YT21.0176. (in Chinese)
Li B, He ZJ, Chen XF (2013) Design, simulation and optimization of ANSYS workbench. Tsinghua University Press, Bei**g (in Chinese)
Li YB, Zhang LC, Zhang QG, He XY, Wang JD, Su Y (2022) Anchorage behavior of grouting sleeves under uniaxial and cyclic loading: a comparative study of the internal structure of sleeves. J Build Eng 49:104057. https://doi.org/10.1016/j.jobe.2022.104057
Liang DX, Zhang N, Rong HY (2022) Study on the failure mechanism of full-length anchorage de-bonding based on anchor agent ring crack propagation. Chin J Rock Mech Eng 42:1–16. https://doi.org/10.13722/j.cnki.jrme.2022.0431
Liu SW, Fu MX, Jia HS, Li WB (2019) Shear characteristics of cuneiform reaming anchorage bolts in coal mine roadways. Rock Mech Rock Eng 52:1931–1943. https://doi.org/10.1007/s00603-018-1670-3
Madrigal J, Barrera D, Sales S (2020) Regenerated fiber Bragg gratings in multicore fiber for multi-parameter sensing. IEEE J Sel Top Quantum Electron 26:1–6. https://doi.org/10.1109/JSTQE.2019.2958998
Ostermayer H, Scheele F (1978) Research on ground anchors in non-cohesive soils. Rev Fr Géotech 3:92–97. https://doi.org/10.1051/geotech/1978003092
Pan DJ, Hong KR, Fu HL, Zhou JJ, Zhang N, Lu GM (2021a) Influence characteristics and mechanism of fragmental size of broken coal mass on the injection regularity of silica sol grouting. Constr Build Mater 269:121251. https://doi.org/10.1016/j.conbuildmat.2020.121251
Pan DJ, Hong KR, Fu HL, Zhou JJ, Zhang N (2021b) Experimental study of the mechanism of grouting colloidal nano-silica in over-broken coal mass. Q J Eng Geol Hydrogeol. https://doi.org/10.1144/qjegh2020-161
Petruzalek M, Jechumtalova Z, Sileny J, Sileny J, Svitek T, Lokajicek T, Turkova I, Kotrly M, Onysko R (2020) Application of the shear-tensile source model to acoustic emissions in Westerly granite. Int J Rock Mech Min Sci 128:104246. https://doi.org/10.1016/j.ijrmms.2020.104246
Rehm G, Eligehausen R (1979) Bond of ribbed bars under high cycle repeated loads. Am Concr Inst J76:415–419. https://doi.org/10.1111/j.1444-0938.1958.tb03573.x
Serrano A, Olalla C (1999) Tensile resistance of rock anchors. Int J Rock Mech Min Sci 36:449–474. https://doi.org/10.1016/S0148-9062(99)00021-2
Sun YT, Bi RY, Sun JB, Zhang JF, Taherdangkoo R, Huang JD, Li GC (2022) Stability of roadway along hard roof goaf by stress relief technique in deep mines: a theoretical, numerical and field study. Geomech Geophys Geo-energy Geo-resour 8:45. https://doi.org/10.1007/s40948-022-00356-8
Tao ZG, Luo SL, Qiao YF, He MC (2021) Key factors analysis and constitutive equation modification of a macro-NPR bolt for achieving high constant resistance and large deformation characteristics. Int J Rock Mech Min Sci 147:104911. https://doi.org/10.1016/j.ijrmms.2021.104911
Toubal L, Chaabouni H, Bocher P, Chen JQ (2020) Monitoring fracture of high-strength steel under tensile and constant loading using acoustic emission analysis. Eng Fail Anal 108:104260. https://doi.org/10.1016/j.engfailanal.2019.104260
Vilhelm J, Rudajev V, Ponomarev AV, Smirnov VB, Lokajicek T (2017) Statistical study of acoustic emissions generated during the controlled deformation of migmatite specimens. Int J Rock Mech Min Sci 100:83–89. https://doi.org/10.1016/j.ijrmms.2017.10.011
Wang ZC, Li SC, Qiao LP, Zhao JG (2013) Fatigue behavior of granite subjected to cyclic loading under triaxial compression condition. Rock Mech Rock Eng 46:1603–1615. https://doi.org/10.1007/s00603-013-0387-6
Wang T, Chang JC, Gong P, Shi WB, Li N, Cheng SX (2020a) The experimental instrumented bolt with fiber Bragg grating force sensors. Arch Min Sci 65:179–194. https://doi.org/10.24425/ams.2020.132714
Wang P, Zhang N, Kan JG, **e ZZ, Wei Q, Yao WH (2020b) Fiber Bragg grating monitoring of full-bolt axial force of the bolt in the deep strong mining roadway. Sensors 20:4242. https://doi.org/10.3390/s20154242
Wang GF, Li G, Dou LM, Mu ZL, Gong SY, Cai W (2020c) Applicability of energy-absorbing support system for rockburst prevention in underground roadways. Int J Rock Mech Min Sci 132:104396. https://doi.org/10.1016/j.ijrmms.2020.104396
Wang H, Qin Y, Wang HB, Chen Y, Liu XC (2021a) Process of overburden failure in steeply inclined multi-seam mining: insights from physical modelling. R Soc Open Sci 8:210275. https://doi.org/10.1098/rsos.210275
Wang XQ, Kang HP, Gao FQ (2021b) Numerical study on the formation of pressure arch in bolted gravel plate. Comput Geotech 130:103933. https://doi.org/10.1016/j.compgeo.2020.103933
**ang Z, Zhang N, **e ZZ, Zhang CH (2021) Deterioration of coal microstructure under discontinuous cyclic loading based on nuclear magnetic resonance. Appl Sci 11:462. https://doi.org/10.3390/app11010462
**e SR, Gao MM, Chen DD, Sun YD, Pan H, Su H, Lan SZ (2017) Stability influence factors analysis and construction of a deep beam anchorage structure in roadway roof. Int J Min Sci Technol 28:445–451. https://doi.org/10.1016/j.ijmst.2017.11.007
**e ZZ, Zhang N, Feng XW, Liang DX, Wei Q, Weng MY (2019) Investigation on the evolution and control of surrounding rock fracture under different supporting conditions in deep roadway during excavation period. Int J Rock Mech Min Sci 123:104122. https://doi.org/10.1016/j.ijrmms.2019.104122
Xu HF, Wang C, Ma LJ, Dong L (2015) Volumetric strain of rock salt under triaxial low-frequency cyclic loading. Chin J Geotech Eng 37:741–746. https://doi.org/10.11779/CJGE201504021. (in Chinese)
Yan S, Song YB, Bai JB, Elmo D (2019) A Study on the failure of resin end-anchored rock bolts subjected to tensile load. Rock Mech Rock Eng 52:1917–1930. https://doi.org/10.1007/s00603-018-1663-2
Yang SQ, Chen M, Tao Y (2021) Experimental study on anchorage mechanical behavior and surface cracking characteristics of a non-persistent jointed rock mass. Rock Mech Rock Eng 54:1193–1221. https://doi.org/10.1007/s00603-020-02325-7
Zhan YB, Zheng PQ, Wang H, Wang QB (2020) The influence of radial stress on mechanical properties of anchorage structure. Appl Sci 10:7029. https://doi.org/10.3390/app10207029
Zhang GJ, Li QS, Zhang Y, Du F (2021) Failure characteristics of roof in working face end based on stress evolution of goaf. Geomech Geophys Geo-Energy Geo-Resour 7:1–22. https://doi.org/10.1007/s40948-021-00252-7
Zhao JJ, Zhang Y (2017) Studies on rock failure of layered rock in underground mining-face and control techniques. Geomech Geophys Geo-energy Geo-resour 3:405–414. https://doi.org/10.1007/s40948-017-0068-0
Zhu D (2019) Study the whole process of deformation and failure of surrounding rock anchorage structure in deep roadway based on multi-source information. Doctoral dissertation, China University of Mining and Technology (in Chinese)
Funding
This paper is financially supported by the National Natural Science Foundation of China (52074263, 52034007, 51864044), and the Postgraduate Research and Practice Innovation Program of Jiangsu Province (KYCX21_2332).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, P., Guo, Y., Cui, G. et al. Cumulative damage and bearing capacity attenuation law of anchorage structure interface under cyclic loading and unloading. Geomech. Geophys. Geo-energ. Geo-resour. 9, 70 (2023). https://doi.org/10.1007/s40948-023-00612-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40948-023-00612-5