
Abstract
The time-fractional advection–diffusion reaction equation (TFADRE) is a fundamental mathematical model because of its key role in describing various processes such as oil reservoir simulations, COVID-19 transmission, mass and energy transport, and global weather production. One of the prominent issues with time fractional differential equations is the design of efficient and stable computational schemes for fast and accurate numerical simulations. We construct in this paper, a simple and yet efficient modified fractional explicit group method (MFEGM) for solving the two-dimensional TFADRE with suitable initial and boundary conditions. The proposed method is established using a difference scheme based on L1 discretization in temporal direction and central difference approximations with double spacing in spatial direction. For comparison purposes, the Crank–Nicolson finite difference method (CNFDM) is proposed. The stability and convergence of the presented methods are theoretically proved and numerically affirmed. We illustrate the computational efficiency of the MFEGM by comparing it to the CNFDM for four numerical examples including fractional diffusion and fractional advection–diffusion models. The numerical results show that the MFEGM is capable of reducing iteration count and CPU timing effectively compared to the CNFDM, making it well-suited to time fractional diffusion equations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fractional calculus (FC) is considered one of the top topics in applied mathematics, with applications emerging in various scientific and engineering disciplines. FC extends the order of the derivatives and integrals from the set of positive integers to the set of real and even complex numbers. In contrast to classical derivatives, fractional-order derivatives have the non-local property, making them an excellent choice for capturing memory and hereditary properties in a variety of real-world phenomena. Generally speaking, the applications of FC have advanced remarkably in various areas, including but not limited to physics, biology, medicine, signal processing, hydrology, rheology, control systems, robotics, economics, anomalous transport, electronic circuits, inventory control problem and viscoelasticity (Sun et al. 2018; Tarasov 2019; Chávez-Vázquez et al. 2022; Radwan et al. 2021; Rahaman et al. 2020). In line with that, several types of fractional derivatives of different kernels such as Riemann-Liouville, Caputo, Grunwald-Letnikov, Hadamard, Caputo-Fabrizio and Atangana-Baleanu have been proposed for suitable simulation of various complex physical phenomena. A major class of FC is the so-called fractional partial differential equation (FPDE), where the time and/or space derivative in the classical PDE is replaced by its fractional counterpart. In recent years, FPDEs have found a wide range of applications in fluid mechanics (Hamid et al. 2022), financial markets (Taghipour and Aminikhah 2022), material science (Yang et al. 2022), neuronal dynamics (Zou et al. 2022), wave propagation, solar particle transport (Vieira et al. 2022) and quantum mechanics (Zu and Yu 2022), to name a few. For extra information about the analysis and applications of FPDEs, the reader can consult (Ara et al. 2018; Goswami et al. 2019; Nnolim 2022; Chakraverty et al. 2022; Salama et al. 2021; Ali et al. 2022; Khan et al. 2023).
The solutions of mathematical models in terms of FPDEs are mainly investigated by either approximate analytical or numerical methods. However, the analytic treatment of FPDEs is not a straight-forward process due to the complexity and non-local nature of fractional derivatives. Exact analytical solutions to FPDEs are scarce in the literature, and in some cases, they are too complicated to be useful. As a result, numerical methods have become indispensable and are resorted to by many researchers, scholars and practitioners for handling real-life fractional models. In this article, we study the two-dimensional time-fractional advection–diffusion reaction equation (TFADRE) to account for its numerical solutions. The said model problem shall be introduced in the subsequent section. Next, we survey some recent numerical treatments of TFADRE. The authors in Cui (2015) and Ren and Wang (2017) applied, respectively, a compact exponential difference scheme and an extrapolated compact difference method for solving the one-dimensional TFADRE with variable coefficients. Wang and Wen 2020 constructed a compact exponential difference scheme to solve the general one-dimensional multi-term TFADRE with non-smooth solutions. They extended their approach to the two-dimensional case in the same study. Haq et al. (2020) developed an implicit meshless spectral algorithm for solving the one-dimensional TFADRE with variable coefficients. Hafez et al. (2020) proposed two Galerkin spectral numerical schemes for the solutions of the d-dimensional TFADRE. They pointed out that their schemes are well-suited to time FPDEs since they preserve the singularity of the solution. Toprakseven (2021) utilized the classical L1 discretization in time and a weak Galerkin element in space to establish a weak Galerkin finite element method for the d-dimensional (\(d\in \{1,2\}\)) TFADRE. Kumar and Zeidan (2021) scrutinized the one-dimensional non-linear TFADRE in which the fractional temporal derivative is defined in the Atangana-Baleanu sense. The authors employed a Legendre operational matrix for the fractional derivative along with a Legendre spectral method to account for the numerical solutions to the mentioned problem. Khalighi et al. (2021) established a hybrid algorithm based on the boundary element method combined with the Chebyshev operational matrix approach for handling the two-dimensional multi-order TFADRE. Li and Wang (2021) established a local discontinuous Galerkin (LDG) method for the one-dimensional TFADRE basted on the L1 scheme for uniform and non-uniform temporal meshes and the LDG method for spatial uniform mesh. Recently, Jannelli (2022) extended an adaptive time-step** numerical scheme proposed in Jannelli (2020) for fractional ordinary differential equations to solve the one-dimensional TFADRE. Afterwards, Zhang and Feng (2022) developed and analyzed a virtual element method to scrutinize the two-dimensional TFADRE with non-smooth solutions. Shortly after, Ngondiep (Ngondiep 2022) constructed an unconditionally stable two-level fourth-order numerical scheme for the one-dimensional TFADRE. More recently, Naeem et al. (2022) generated approximate analytical solutions for the one-dimensional TFADRE based on the combination of the Elzaki transform and the homotopy perturbation method. Other numerical investigations for fractional diffusion models can be found in Roul and Rohil (2022), Hang et al. (2023) and Chen et al. (2020). Most of the aforementioned methods are designed for one-dimensional problems, creating a research gap for develo** new efficient computational algorithms for higher-dimensional problems. Herein lies the first motivation for our work.
Unlike classical advection diffusion reaction equations, the numerical solution process of TFADRE is a challenging computational task. The reason for this is the historical dependence and universal mutuality of fractional differential operators. Owing to the non-local property, the solution values at the current time level require the solution information at all previous time levels, which results in more sophisticated computations even for low-dimensional fractional problems (Salama and Ali 2019, 2020). The computational effort may grow dramatically as the mesh size increases and the integration proceeds forward. To surpass such major limitations and reduce the corresponding computational complexity, a number of computational algorithms were suggested, such as the short memory principle (Singh et al. 2021), preconditioning (Sunarto et al. 2022), parallel computing (Wu et al. 2021) and multigrid methods (Pan et al. 2021). The historical dependence feature of fractional derivatives permits accurate and robust modeling of real-life phenomena but leads to severe computational drawbacks in many cases. In fact, the development of efficient numerical methods that produce accurate simulations and maintain low computational effort is one of the open problems in fractional calculus; for example, see (Diethelm et al. 2022). This is the study’s second motivation.
Explicit group iterative methods are another viable option for designing efficient numerical schemes for FPDEs. They utilize small, fixed-size groups of points on the standard or rotated grids and can be combined with other numerical methods, including finite difference method, finite element method and collocation method. The main feature of explicit group methods is that they can reduce the spectral radius of the iteration matrix and diminish the computational cost effectively, making them suitable for non-local fractional problems. In recent years, a number of articles have appeared that dealt successfully with FPDEs using explicit group methods. They have been used for efficient computations of accurate numerical solutions to the two-dimensional fractional diffusion equation (Salama et al. 2022a), two-dimensional fractional cable equation (Salama and Abd Hamid 2020; Khan et al. 2021), two-dimensional fractional reaction diffusion equation (Abdi et al. 2021a) and two-dimensional fractional advection diffusion equation (Salama et al. 2022b; Balasim et al. 2017). For further applications and analysis of explicit group methods, we refer the reader to Salama et al. (2022c), Abdi et al. (2021b), Ali et al. (2021), Khan et al. (2020). In this work, we focus on a general class of time FPDEs (i.e., TFADRE) that constitutes previously researched classes as a special case. This is the third motivation for our work.
Motivated by the previous discussions, the main aim of this paper is to present the modified fractional explicit group method (MFEGM) based on finite difference approximations for handling the more general TFADRE. The MFEGM is an easy-to-implement solution procedure and can be executed on parallel computers. This represents an additional advantage of the selected method. For the sake of comparison, we first simulate the model problem using a fully discrete scheme, namely Crank–Nicolson finite difference method (CNFDM) based on the L1 formula in time and central difference approximations in space. The theoretical investigations of the proposed numerical schemes rely on three factors: stability, consistency and convergence. Different fractional order exponents are utilized to exhibit the dynamics of the model problem. The numerical findings and comparison with the CNFDM show the computational efficiency and reliability of the proposed MFEGM, which can be extended to solve other FPDEs. Moreover, the obtained results are particularly useful for time consuming practical applications in engineering and scientific experimentation. In summary, the interest is directed toward the following three items:
-
Detailed description of CNFDM and MFEGM for the TFADRE with Dirichlet-type initial-boundary conditions.
-
Illustrations of the stability and convergence of the proposed methods.
-
Several numerical examples and discussions that validate our considerations.
The rest of the paper is organized as follows. In Sect. 2, we introduce the two-dimensional TFADRE as a mathematical model of real-world phenomena. The detailed description of the CNFDM and MFEGM is given in Sect. 3 and 4, respectively. In Sect. 5, we analyze the stability of the proposed solution schemes using the Fourier method, followed by convergence in Sect. 6. Section 7 includes a number of numerical simulations as well as graphical and tabulated results demonstrating the accuracy and efficiency of our numerical schemes. Finally, the paper is concisely concluded in Sect. 8.
2 The mathematical model
The diffusion phenomenon, where molecules or particles are transferred from the region of higher concentration to the region of lower concentration, is one of the basic processes in nature with a wide range of applications in science and engineering. In the context of continuous random walk, the diffusion process can be interpreted by the Brownian motion where the mean square displacement is given by the following relation:
where \(\Delta r\) is the displacement of the Brownian molecule in some interval t, d and D denote the spatial dimension and the diffusion coefficient, respectively. In many physical complex phenomena, the mean square displacement revels an anomalous behaviour and does not follow the above linear temporal relation. Such an anomalous diffusion process can be modeled with remarkable success under the framework of fractional derivatives (Oliveira et al. 2019). The diffusion phenomenon can be associated with advection and reaction processes to form a general model in terms of the advection–diffusion reaction equation. Classical advection–diffusion reaction equations are an important class of PDEs, and many papers on numerical schemes for solving them have been published (Savović et al. 2022; Zhang and Ge 2021; Lin et al. 2020; Chowdhury and Kumar 2020; Singh et al. 2019; Araya et al. 2020). The two-dimensional advection–diffusion reaction equation with Dirichlet-type boundary conditions can be written as follows:
On the other hand, the TFADRE is a variant of the classical advection–diffusion reaction equation in which the integer-order derivative is replaced by the Caputo fractional derivative. The fractional Caputo derivative is one of the most useful differential operators for dealing with real-world phenomena because it allows the implementation of initial and boundary conditions as those of the integer-order case. In recent years, TFADREs have received much attention and have been used to describe various real-world problems. They have been utilized to describe anomalous diffusion phenomena in complex and disordered systems. The usefulness of TFADRE has been verified in modeling various physical processes, such as oil reservoir simulations, transmission of COVID-19, transport of mass and energy and global weather production. Moreover, TFADRE has been employed for modeling option prices with success in financial markets. For these reasons, the solution process of the TFADRE is a hot topic in the field of applications.
In this study, we present and analyze a simple and yet efficient numerical scheme for the two-dimensional TFADRE reads as,

where \(\Omega =[0,L]^2\) is the solution domain and \(\partial \Omega \) is it is boundary. P(x, y, t) is the unknown function representing a concentration, a population size, chemical species or option prices. \(K_1\) and \(K_2\) are the diffusion coefficients, \(V_1\) and \(V_2\) are the advection coefficients and M is the reaction coefficient. \(\alpha \in (0,1)\), f(x, y, t) is the source term, and \({}^C_0D_t^{\alpha } P\) is the Caputo time fractional derivative of order \(\alpha \) defined as,
From the definition of the Caputo fractional derivative, it can be observed that the exact solution of the model problem (1)–(3) may have weak regularity at the initial time. Without loss of this constraint, we assume the considered problem has a unique and sufficiently smooth exact solution.
3 Crank Nicolson finite difference method (CNFDM)
In this section, we propose a fully discrete numerical scheme for solving the model problem (1). To this end, the solution domain is discretized as \(\Omega _{h\tau }=\Omega _h\Omega _{\tau }\), where \(\Omega _h=\{x_i=ih_x,\ i=0,1,\dots , N_x,\ y_j=jh_y,\ j=0,1,\dots ,N_y\}\) and \(\Omega _{\tau }=\{t_n=n\tau ,\ n=0,1,\dots ,N_t\}\). Here, \(h_x=L/N_x\), \(h_y=L/N_y\) and \(\tau =T/N_t\) represent the step sizes in the spatial and temporal directions, respectively. Assume that \(P(x,y,t)\in C^2(\Omega \times \partial \Omega )\) and \(P_{i,j}^n=P(x_i,y_j,t_n)\), the first and second order spatial derivatives can be discretized as follows:
The discretization of the Caputo time fractional derivative is described by the difference formula with the following form:
where
The model problem (1) is now approximated as follows,
Substituting (4)–(8) into (1), the following CNFDM is obtained:
with the following initial and boundary conditions
where
Here, \({\mathcal {P}}_{i,j}^n\) denotes the numerical approximation of \(P_{i,j}^n\) after omitting the higher order terms. Figure 1 highlights the computational molecule of the CNFDM defined by (10). It is well known that the application of Eq. (10) to the \(\blacklozenge \) points will result in large and sparse linear systems that can be solved using iterative techniques. Considering a point-wise iterative procedure, and at any time level \(t_n\), Eq. (10) is utilized to iterate solutions at all \(\blacklozenge \) points until a predetermined convergence criterion is met. Once the converged solutions are attained, they are used as an initial guess for the next time level \(t_{n+1}\). The iterative process is terminated when the final time level is reached. In the next section, we propose a new group-wise iterative numerical scheme to simulate the model problem (1) with less computing effort.

Computational molecule of the CNFDM difference scheme with \(N_x=N_y=10\)
4 Description of the modified fractional explicit group method (MFEGM)
In this section, the MFEGM is proposed for the solution process of the time fractional advection–diffusion–reaction equation (1). To explain the solution method, we consider a new computational mesh \(\Omega _{2\,h}=\{x_i=2ih_x,\ i=0,1,\dots ,N_x;\ y_j=2jh_y,\ j=0,1,\dots ,N_y\}\), where \(2h_x=\frac{2\,L}{N_x}\) and \(2h_y=\frac{2L}{N_y}\). Applying Crank Nicolson difference scheme on the new mesh for approximating problem (1), the following expression is obtained:
Disregarding higher order terms and using \({\mathcal {P}}_{i,j}^n\) as an approximation to \(P_{i,j}^n\), the following 2h-spaced difference scheme is attained:
where
Before proceeding to the formulation of the MFEGM, we need a new skewed difference scheme for approximating the model problem (1). Such numerical scheme can be achieved by rotating the standard mesh 45\(^\circ \) clockwise and applying Taylor expansion on the resulted mesh as follows:
After simplification and omitting the small error terms, we obtain the following skewed difference scheme:
with
Consider the four-point groups of the discretized solution domain that are associated with the spatial locations (i, j), \((i+2,j)\), \((i+2,j+2)\) and \((i,j+2)\). Applying Eq. (12) to any group of four points will give the following \((4\times 4)\) system of equations:
in which
and
Through the reversal of the coefficient matrix in (15), the four-point MFEGM is obtained as follows:
where

Computational molecule of the MFEGM with \(N_x=N_y=10\)
As shown in Fig. 2, the mesh points of the discretized solution domain using the MFEGM are branched into three types of points, i.e. \(\blacklozenge \), \(\square \) and \(\Circle \). It can be verified that the implementation of the MFEGM (16) requires only points of type \(\blacklozenge \), makes it independent from the remaining points of type \(\square \) and \(\Circle \). Therefore, and at any time level \(t_n\), the MFEGM proceeds by iterating the solutions at the \(\blacklozenge \) points until a predefined convergence criterion is achieved. After convergence, the solutions at the residual points of type \(\square \) and \(\Circle \) are computed directly once using Eqs. (14) and (10), respectively. Compared to the CNFDM presented in the previous section, the MFEGM comprise only quarter of the mesh points in the iterative process which is expected to accelerate the rate of convergence, especially when dealing with large scale linear systems. In this work, the four-point MFEGM is combined with the Gauss-Seidel iterative scheme and is illustrated through the next algorithm.

5 Stability analysis
In this section, we analyze the stability of the proposed numerical schemes with the help of Fourier analysis approach. To facilitate our theoretical analysis, the following lemma is introduced.
Lemma 1
The coefficients \(W_s,\ (s=0,1,\dots )\) in (8) satisfy
-
1.
\(W_{n-m}>W_{n-m+1},\quad m=0,1,2,\dots ,n-1\).
-
2.
\(\sum _{m=1}^{n-1}\left( W_{n-m}-W_{n-m+1}\right) =W_1-W_n\).
5.1 Stability of the h-spaced numerical scheme
Suppose that \({\mathfrak {P}}_{i,j}^n\) is the approximate solution of (10), and define
and
The roundoff error equation can be obtained as follows,
with the following initial and boundary conditions
Next, we define the following grid function
where \(\rho ^n(x,y)\) has the Fourier expansion given by
in which \(I=\sqrt{-1}\) and
The 2-norm can be defined as
Introducing the Parseval equality
we obtain
Suppose the solution of (17) has the following form
where \(\beta _1=2\pi l_1/L\) and \(\beta _2=2\pi l_2/L\) are the real spatial wave numbers. Setting (20) into (17), yields
where
Lemma 2
Let \(\Upsilon ^{n+1}\), \(n=0,1,\dots ,N_t-1\) be the solution of (21), given that \(3^{1-\alpha }\le 2\), then it holds that
Proof
Here, mathematical induction shall be used to complete the proof. For \(n=0\), we have
Now, we assume that
For \(s=n\), utilizing Eq. (21) along with lemma 1, we have
As \(n\rightarrow \infty \), \(\tau \), \(\kappa \), \(\mu _1\) and \(\mu _2\) approach to zero and
This leads to the following cases:
Case I. If \(0.5^{1-\alpha }-W_1\ge 0\), then
Case II. If \(0.5^{1-\alpha }-W_1<0\), then
Here,
which ends the proof. \(\square \)
Theorem 1
Given that \(3^{1-\alpha }<2\), the h-spaced difference scheme (10) is stable.
Proof
On the basis of lemma 2 and Parseval equality, it follows that
This means that the difference scheme (10) is unconditionally stable. \(\square \)
5.2 Stability of the 2h-spaced numerical scheme
Let \(\hat{{\mathcal {P}}}_{i,j}^n\) is the approximate solution of (12), and define
and
The roundoff error equation can be easily obtained as,
with the following initial and boundary conditions
Next, we define the following grid function
where \({\mathcal {E}}^n(x,y)\) has the Fourier expansion given by
such that
The 2-norm is given by
With the help of the Parseval equality
we get
Suppose the solution of (22) has the following form
Substituting (25) into (22) leads to
where
Lemma 3
Let \(\Theta ^{n+1}\), \(n=0,1,\dots ,N_t-1\) be the solution of (26), given that \(3^{1-\alpha }\le 2\), then it holds that
Proof
Again, mathematical induction is utilized for the completion of the proof. For \(n=0\), we have
Now, we suppose that
For \(s=n\), using Eq. (26) together with lemma 1, we have
As \(n\rightarrow \infty \), \(\tau \), \(\kappa \), \(\eta _1\) and \(\eta _2\) approach to zero and
From the previous subsection, we know that
This completes the proof. \(\square \)
Theorem 2
Given that \(3^{1-\alpha }\le 2\), the 2h-spaced difference scheme (12) is stable.
Proof
According to lemma 3 and Parseval equality, we obtain
Hence, the difference scheme (12) is unconditionally stable. \(\square \)
6 Convergence analysis
In this part, we describe the convergence analysis of the proposed numerical schemes. For this purpose, the following theorem is required.
Theorem 3
(Lax-Richertmyer theorem) if the differential equation (1) is well-posed and the finite difference scheme is consistent, then the finite difference scheme is convergent if and only if, it is stable
The next theorem discuss the convergence of the h-spaced difference scheme defined by (10).
Theorem 4
The h-spaced difference scheme (10) is consistent, and hence is convergent.
Proof
Let \(R_{i,j}^n\) be the truncation error at the point \((x_i,y_j,t_n)\). According to Eqs. (4–8), the local truncation error of the numerical scheme (10) is
It can be easily shown that the local truncation error tends to zero as \(\tau \), \(h_x\) and \(h_y\) go to zero. This means that the difference scheme (10) is consistent, so that by Theorem 3, the difference scheme (10) is convergent. \(\square \)
Theorem 5
The 2h-spaced difference scheme (12) is consistent, and hence is convergent.
Proof
The proof is similar to Theorem 4. \(\square \)
7 Numerical experiments and discussion of results
In this part, four numerical examples are presented to demonstrate the computational efficiency of the MFEGM by comparing to the CNFDM. All programming codes are written in MATLAB and run on a PC with i7-8550U CPU, 8 GB RAM and Windows 10 (64-bit) operating system. The obtained numerical results are represented in terms of several illustrative figures and tables. In these tables, "Sec" denotes the amount of computational time required for solving the problem under consideration. "Iter" means the number of iterations needed to achieve convergence at the last time level. And, "MAE" stands for the maximum absolute error between the numerical and exact solutions. In all numerical examples, we let \(N_x=N_y=N\), and give the source terms by the exact solutions.
Example 1
Consider the model problem with the exact solution \(u(x,y,t)=e^t(1-x^2)^2(1-y^2)^2,\)
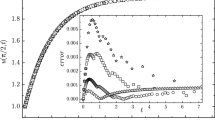
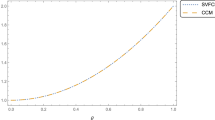
Table 1 presents a comparison between the elapsed time in seconds, number of iterations and maximum absolute errors of the MFEGM and CNFDM at \(T=1\), \(\tau =0.1,\ 0.01\) and various values of \(\alpha \). From this table, we can observe that the approximate solution of the MFEGM converges to the exact solution with less computational time and iteration count in comparison to the CNFDM. For instance, at \(\alpha =0.9\) and \(\tau =0.01\), the CNFDM reaches convergence after 135 iterations with 165.41 computing time, while the MFEGM terminates after only 27 iterations with 20.10 computing time. The numerical solutions of the proposed methods and the exact solution at \(y=0.5\), \(N=70\), \(N_t=100\), \(\alpha =0.5\) and different final times \(T=1\), 1.5 and 2 are drawn in Fig. 3. In addition, Fig. 4 depicts the plot of maximum errors for the CNFDM and the MFEGM at \(N=62\), \(N_t=100\), \(\alpha =0.5\) and \(T=1\). From these figures, we can see that the numerical solutions of our proposed methods are in good agreement with the exact solution.

Numerical solutions and exact solutions for Example 1 at \(y=0.5\), \(N=70\), \(N_t=100\), \(\alpha =0.5\) and \(T=1,\ 1.5,\ 2\)

The 3D error plot of absolute errors using a CNFDM and b MFEGM for Example 1 at \(N=62\), \(N_t=100\), \(\alpha =0.5\) and \(T=1\)
Example 2
Consider the following model problem,
The exact solution of the above problem is \(u(x,y,t)=20t^{1+\alpha }xy\sin (xy)e^{xy}\). Table 2 enumerates the numerical results of the CNFDM and the MFEGM in solving Example 2 at \(N=62\), \(N_t=62\), several values of \(\alpha \) and diverse final times \(T=1\), 1.5 and 2. From which we notice that the CNFDM and the MFEGM simulate the considered problem accurately where the later method results in much faster simulations that the former one for different values of T. The graphical representations of the numerical and exact solutions of Example 2 at \(y=0.5\), \(N=70\), \(N_t=100\), \(\alpha =0.5\) and \(T=1\), 1.5 and 2 are highlighted in Fig. 5. We can observe that the numerical solutions agree well with the exact solutions. One more time, we plot the execution time of the proposed methods versus several mesh sizes at fixed \(T=1\), \(\tau =0.01\) and \(\alpha =0.5\) in Fig. 6. One can see that the MFEGM requires smaller amount of running time compared to the CNFDM, especially for larger values of N. This is very useful when solving large-scale linear systems.

Numerical solutions and exact solutions for Example 2 at \(y=0.5\), \(N=70\), \(N_t=100\), \(\alpha =0.5\) and \(T=1,\ 1.5,\ 2\)

The plot of elapsed time in (seconds) against N for Example 2 using CNFDM (red line) and MFEGM (green line)
Example 3
Consider the following time fractional diffusion equation,
The exact solution of Example 3 is given by \(u(x,y,t)=t^2e^{x+y}\). Table 3 shows the performance of the proposed methods in solving the considered problem. The results in this table are achieved at \(T=4\), \(\tau =0.1,\ 0.01\) and different fractional orders. To show the accuracy of the solution methods, Fig. 7 portrays absolute errors of the CNFDM (left frame) and MFEGM (right frame) at \(N=62\), \(N_t=100\), \(\alpha =0.5\) and \(T=4\).

The 3D error plot of absolute errors using a CNFDM and b MFEGM for Example 3 at \(N=62\), \(N_t=100\), \(\alpha =0.5\) and \(T=4\)
Example 4
Consider the following time fractional advection–diffusion equation,
The exact solution of Example 4 reads as \(u(x,y,t)=t^2(x-x^2+y-y^2)\). The results of solving this problem are shown in Table 4. Numerical simulations have been implemented at \(T=8\), \(\tau =0.1,\ 0.01\) and different fractional orders. Figure 8 draws absolute errors of the CNFDM (left frame) and MFEGM (right frame) at \(N=62\), \(N_t=100\), \(\alpha =0.5\) and \(T=8\).
8 Conclusion
Due to the non-local property of fractional derivatives, the numerical treatment of time FPDEs usually requires substantial computer resources, which may result in some computational challenges in practice. In this paper, we have proposed the MFEGM for solving a class of the general two-dimensional TFADRE involving source terms and Caputo-type temporal derivative. It has been constructed utilizing a difference scheme based on L1 discretization in the temporal direction and central difference approximations with double spacing in the spatial direction. We have illustrated the reliability of the MFEGM by comparing it to the CNFDM derived in Sect. 3. The stability and convergence of the proposed methods have been proven theoretically and comprehended by several numerical examples. The comparison of the numerical results obtained by the MFEGM with the numerical results obtained by the CNFDM shows the accuracy, computational efficiency and simple implementation of the former. We have also discussed the application of the methods to the fractional diffusion and fractional advection–diffusion models, from which we deduce the potential capability of the MFEGM to solve time fractional diffusion models and other FPDEs that arise in science and engineering disciplines, providing a new line of future research.

The 3D error plot of absolute errors using a CNFDM and b MFEGM for Example 4 at \(N=62\), \(N_t=100\), \(\alpha =0.5\) and \(T=8\)
References
Abdi N, Aminikhah H, Refahi Sheikhani A (2021) On rotated grid point iterative method for solving 2D fractional reaction-subdiffusion equation with caputo-fabrizio operator. J Differ Equ Appl 27(8):1134–1160
Abdi N, Aminikhah H, Sheikhani A, Alavi J, Taghipour M (2021) An efficient explicit decoupled group method for solving two–dimensional fractional burgers’ equation and its convergence analysis. Adv Math Phys 2021
Ali A, Abdeljawad T, Iqbal A, Akram T, Abbas M (2021) On unconditionally stable new modified fractional group iterative scheme for the solution of 2d time-fractional telegraph model. Symmetry 13(11):2078
Ali U, Naeem M, Abdullah FA, Wang M-K, Salama FM (2022) Analysis and implementation of numerical scheme for the variable-order fractional modified sub-diffusion equation. Fractals 2240253
Ara A, Khan NA, Razzaq OA, Hameed T (2018) Raja MAZ (2018) Wavelets optimization method for evaluation of fractional partial differential equations: an application to financial modelling. Adv Differ Equ 1:1–13
Araya R, Aguayo J, Muñoz S (2020) An adaptive stabilized method for advection-diffusion-reaction equation. J Comput Appl Math 376:112858
Balasim AT, Ali NHM (2017) New group iterative schemes in the numerical solution of the two-dimensional time fractional advection-diffusion equation. Cogent Math 4(1):1412241
Chakraverty S, Jena RM, Jena SK (2022) Computational fractional dynamical systems: fractional differential equations and applications. Wiley, Hoboken
Chávez-Vázquez S, Gómez-Aguilar JF, Lavín-Delgado J, Escobar-Jiménez RF, Olivares-Peregrino VH (2022) Applications of fractional operators in robotics: a review. J Intell Robot Syst 104(4):1–40
Chen C, Liu H, Zheng X, Wang H (2020) A two-grid mmoc finite element method for nonlinear variable-order time-fractional mobile/immobile advection-diffusion equations. Comput Math Appl 79(9):2771–2783
Chowdhury M, Kumar BR (2020) On subgrid multiscale stabilized finite element method for advection-diffusion-reaction equation with variable coefficients. Appl Numer Math 150:576–586
Cui M (2015) Compact exponential scheme for the time fractional convection-diffusion reaction equation with variable coefficients. J Comput Phys 280:143–163
Diethelm K, Kiryakova V, Luchko Y, Machado J, Tarasov VE (2022) Trends, directions for further research, and some open problems of fractional calculus. Nonlinear Dyn 1–26
Goswami A, Singh J, Kumar D, Gupta S et al (2019) An efficient analytical technique for fractional partial differential equations occurring in ion acoustic waves in plasma. J Ocean Eng Sci 4(2):85–99
Hafez RM, Hammad M, Doha EH (2020) Fractional jacobi galerkin spectral schemes for multi-dimensional time fractional advection–diffusion–reaction equations. Eng Comput 1–18
Hamid M, Usman M, Yan Y, Tian Z (2022) An efficient numerical scheme for fractional characterization of mhd fluid model. Chaos Solitons Fractals 162:112475
Hang T, Zhou Z, Pan H, Wang Y (2023) The conservative characteristic difference method and analysis for solving two-sided space-fractional advection-diffusion equations. Numer Algor 92(3):1723–1755
Haq S, Hussain M, Ghafoor A (2020) A computational study of variable coefficients fractional advection-diffusion-reaction equations via implicit meshless spectral algorithm. Eng Comput 36(4):1243–1263
Jannelli A (2020) A novel adaptive procedure for solving fractional differential equations. J Comput Sci 47:101220
Jannelli A (2022) Adaptive numerical solutions of time-fractional advection-diffusion-reaction equations. Commun Nonlinear Sci Numer Simul 105:106073
Khalighi M, Amirianmatlob M, Malek A (2021) A new approach to solving multiorder time-fractional advection-diffusion-reaction equations using bem and chebyshev matrix. Math Methods Appl Sci 44(4):2964–2984
Khan MA, Ali NH, Hamid NNA et al (2020) (2020) A new fourth-order explicit group method in the solution of two-dimensional fractional rayleigh-stokes problem for a heated generalized second-grade fluid. Adv Differ Equ 1:1–22
Khan MA, Ali NHM, Abd Hamid NN (2021) The design of new high-order group iterative method in the solution of two-dimensional fractional cable equation. Alex Eng J 60(4):3553–3563
Khan MA, Alias N, Khan I, Salama FM, Eldin SM (2023) A new implicit high-order iterative scheme for the numerical simulation of the two-dimensional time fractional cable equation. Sci Rep 13(1):1549
Kumar S, Zeidan D (2021) An efficient mittag-leffler kernel approach for time-fractional advection-reaction-diffusion equation. Appl Numer Math 170:190–207
Li C, Wang Z (2021) Numerical methods for the time fractional convection-diffusion-reaction equation. Numer Funct Anal Optim 42(10):1115–1153
Lin J, Xu Y, Zhang Y (2020) Simulation of linear and nonlinear advection-diffusion-reaction problems by a novel localized scheme. Appl Math Lett 99:106005
Naeem M, Aljahdaly NH, Shah R, Weera W (2022) The study of fractional-order convection-reaction-diffusion equation via an elzake atangana-baleanu operator. AIMS Math 7(10):18080–18098
Ngondiep E (2022) A two-level fourth-order approach for time-fractional convection-diffusion-reaction equation with variable coefficients. Commun Nonlinear Sci Numer Simul 111:106444
Nnolim UA (2022) Dynamic selective edge-based integer/fractional-order partial differential equation for degraded document image binarization. Int J Image Graphics 22(04):2250030
Oliveira FA, Ferreira RM, Lapas LC, Vainstein MH (2019) Anomalous diffusion: a basic mechanism for the evolution of inhomogeneous systems. Front Phys 7:18
Pan K, Sun H-W, Xu Y, Xu Y (2021) An efficient multigrid solver for two-dimensional spatial fractional diffusion equations with variable coefficients. Appl Math Comput 402:126091
Radwan AG, Khanday FA, Said LA (2021) Fractional order systems: an overview of mathematics, design, and applications for engineers
Rahaman M, Mondal SP, Shaikh AA, Pramanik P, Roy S, Maiti MK, Mondal R, De D (2020) Artificial bee colony optimization-inspired synergetic study of fractional-order economic production quantity model. Soft Comput 24:15341–15359
Ren L, Wang Y-M (2017) A fourth-order extrapolated compact difference method for time-fractional convection-reaction-diffusion equations with spatially variable coefficients. Appl Math Comput 312:1–22
Roul P, Rohil V (2022) A novel high-order numerical scheme and its analysis for the two-dimensional time-fractional reaction-subdiffusion equation. Numer Algor 90(4):1357–1387
Salama FM, Abd Hamid NN et al (2020) (2020) Efficient hybrid group iterative methods in the solution of two-dimensional time fractional cable equation. Adv Differ Equ 1:1–20
Salama FM, Ali NHM (2019) Fast \({O(N)}\) hybrid method for the solution of two dimensional time fractional cable equation. Compusoft 8(11):3453–3461
Salama FM, Ali NHM (2020) Computationally efficient hybrid method for the numerical solution of the 2D time fractional advection-diffusion equation. Int J Math Eng Manag Sci 5(3):432
Salama FM, Ali NHM, Abd Hamid NN (2021) Fast \({O(N)}\) hybrid laplace transform-finite difference method in solving 2D time fractional diffusion equation. J Math Comput Sci 23:110–123
Salama FM, Abd Hamid NN, Ali NHM, Ali U (2022) An efficient modified hybrid explicit group iterative method for the time-fractional diffusion equation in two space dimensions. AIMS Math 7(2):2370–2392
Salama FM, Abd Hamid NN, Ali U, Ali NHM (2022) Fast hybrid explicit group methods for solving 2D fractional advection-diffusion equation. AIMS Math 7(9):15854–15880
Salama FM, Ali U, Ali A (2022) Numerical solution of two-dimensional time fractional mobile/immobile equation using explicit group methods. Int J Appl Comput Math 8(4):1–28
Savović S, Drljača B, Djordjevich A (2022) A comparative study of two different finite difference methods for solving advection-diffusion reaction equation for modeling exponential traveling wave in heat and mass transfer processes. Ricerche di Matematica 71(1):245–252
Singh H, Srivastava H, Hammouch Z, Nisar KS (2021) Numerical simulation and stability analysis for the fractional-order dynamics of covid-19. Results Phys 20:103722
Singh A, Das S, Ong SH, Jafari H (2019) Numerical solution of nonlinear reaction–advection–diffusion equation. J Comput Nonlinear Dyn 14(4)
Sun H, Zhang Y, Baleanu D, Chen W, Chen Y (2018) A new collection of real world applications of fractional calculus in science and engineering. Communications in Nonlinear Science and Numerical Simulation 64:213–231
Sunarto A, Agarwal P, Sulaiman J, Chew JVL (2022) computational approach via half-sweep and preconditioned AOR for fractional diffusion. Intell Autom Soft Comput 31(2):1173–1184
Taghipour M, Aminikhah H (2022) A spectral collocation method based on fractional pell functions for solving time-fractional black-scholes option pricing model. Chaos Solitons Fractals 163:112571
Tarasov VE (2019) On history of mathematical economics: application of fractional calculus. Mathematics 7(6):509
Toprakseven Ş (2021) A weak galerkin finite element method for time fractional reaction-diffusion-convection problems with variable coefficients. Appl Numer Math 168:1–12
Vieira N, Ferreira M, Rodrigues MM (2022) Time-fractional telegraph equation with \(\psi \)-hilfer derivatives. Chaos Solitons Fractals 162:112276
Wang Y-M, Wen X (2020) A compact exponential difference method for multi-term time-fractional convection-reaction-diffusion problems with non-smooth solutions. Appl Math Comput 381:125316
Wu L, Pan Y, Yang X (2021) An efficient alternating segment parallel finite difference method for multi-term time fractional diffusion-wave equation. Comput Appl Math 40(2):1–20
Yang Y, Wang J, Chen Y, Liao H-l (2022) Compatible l2 norm convergence of variable-step l1 scheme for the time-fractional mbe model with slope selection. J Comput Phys 467:111467
Zhang Y, Feng M (2022) The virtual element method for the time fractional convection diffusion reaction equation with non-smooth data. Comput Math Appl 110:1–18
Zhang L, Ge Y (2021) Numerical solution of nonlinear advection diffusion reaction equation using high-order compact difference method. Appl Numer Math 166:127–145
Zou W, Tang Y, Hosseini VR et al (2022) The numerical meshless approach for solving the 2d time nonlinear multi-term fractional cable equation in complex geometries. FRACTALS (fractals) 30(05):1–12
Zu C, Yu X (2022) Time fractional schrödinger equation with a limit based fractional derivative. Chaos Solitons Fractals 157:111941
Acknowledgements
The authors would like to thank the anonymous reviewers for their valuable comments which improved the manuscript.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Communicated by Vasily E. Tarasov.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Salama, F.M., Balasim, A.T., Ali, U. et al. Efficient numerical simulations based on an explicit group approach for the time fractional advection–diffusion reaction equation. Comp. Appl. Math. 42, 157 (2023). https://doi.org/10.1007/s40314-023-02278-x
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-023-02278-x
Keywords
- Fractional advection–diffusion reaction equation
- Explicit group approach
- Finite difference scheme
- Stability analysis
- Numerical experiments