
Abstract
Over the past two decades, low-cost single-frequency Global Navigation Satellite System (GNSS) receivers have been used in numerous engineering fields and applications due to their affordability and practicality. However, their main drawback has been the inability to track satellite signals in multiple frequencies, limiting their usage to short baselines only. In recent years, low-cost dual-frequency GNSS receivers equipped with Real-Time-Kinematic (RTK) engines entered the mass market, addressing many of the limitations of single-frequency GNSS receivers. This review article aimed to analyze the observations and positioning quality of low-cost GNSS receivers in different positioning methods. To provide answers to defined research questions, relevant studies on the topic were selected and investigated. From the analyzed studies, it was found that GNSS observations obtained from low-cost GNSS receivers have lower quality compared to geodetic counterparts, however, they can still provide positioning solutions with comparable accuracy in static and kinematic positioning modes, particularly for short baselines. Challenges persist in achieving high positioning accuracy over longer baselines and in adverse conditions, even with dual-frequency GNSS receivers. In the upcoming years, low-cost GNSS technology is expected to become increasingly accessible and widely utilized, effectively meeting the growing demand for positioning and navigation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Global Navigation Satellite System (GNSS) technology has been used for more than four decades for various purposes. Initially, its primary objective was to offer global-scale navigation and positioning with an accuracy of a few meters. However, through continuous advancements and developments in the field, the accuracy of positioning has significantly improved. Presently, positioning accuracy has reached the sub-centimeter level, meeting the requirements of numerous engineering fields and applications (Leick et al. 2015; Teunissen and Montenbruck 2017).
High positioning accuracy is obtained with high-quality geodetic GNSS receivers, their prices have decreased over the years but remain a challenge for many users and projects with a limited budget. As a consequence, many researchers are considering low-cost GNSS receivers as a potential solution. These GNSS receivers not only offer affordability but also address the growing demand for precise positioning and navigation driven by rapid technological advancements in recent years.
Low-cost single-frequency GNSS receivers have been available in the market for the past two decades. Initially, these GNSS sensors were primarily designed for navigation purposes and did not offer phase observations or make them accessible to users (Weston and Schwieger 2010; Lipatnikov and Shevchuk 2019). Subsequently, certain manufacturers began offering access to raw data from their low-cost single-frequency GNSS receiver. However, the primary limitation of single-frequency GNSS receivers was the inability to compensate for the ionospheric delay due to the lack of observations from second frequency. Removal of ionospheric bias is possible with the combination of phase and code observations on the same frequency, however, this severly worsens the precision of the results (Sterle et al. 2015). As a result, their practical use was restricted to short baselines of 10–15 km. While these GNSS receivers could operate in Real-Time Kinematic (RTK) mode, most of them did not possess integrated RTK engines like high-end geodetic GNSS receivers.
To address these limitations, various manufacturers, began develo** low-cost GNSS receivers with enhanced capabilities and were designed to receive satellite signals from all GNSS constellations (GPS, GLONASS, Galileo, BDS) in dual frequencies. In addition, these newly developed GNSS receivers offered the advantage of being configurable using the freely available GNSS applications and featured an integrated RTK engine. Consequently, many researchers analyzed and evaluated the observation and positioning quality of newly developed low-cost dual-frequency GNSS receivers.
To the author’s knowledge, there is not a review article that will summarize the research performed until now with single and double-frequency low-cost GNSS receivers. Therefore, this review article is performed based on the following research questions:
-
RQ 1: What is the observation quality of low-cost GNSS receivers?
-
RQ 2: What is the positioning accuracy of low-cost GNSS receivers?
The review article is organized as follows: in Sect.1, a brief introduction to low-cost GNSS technology is provided along with defined research questions. Sect. 2 presents an overview of studies that analyze the quality of GNSS observations from low-cost GNSS receivers. Sect. 3 summarizes the positioning accuracy achieved with low-cost GNSS receivers in relative and absolute positioning modes. The last advances, advantages, and disadvantages of low-cost GNSS receivers are discussed in Sect. 4. Lastly, Sect. 5 summarizes the key findings of the study.
Observations quality
In this section, significant factors for the GNSS observations quality (carrier-to-noise ratio, multipath, cycle slips, code and phase noise, and susceptibility to intentional jamming) are summarized and described. This section provides more details and answers for RQ 1 (What is the observation quality of low-cost GNSS receivers? ).
Carrier-to-noise ratio
Low-cost GNSS receivers and antennas are of lower quality when compared to high-end geodetic counterparts. The lower quality indicates lower signal strength, usually referred to as carrier-to-noise ratio (C/N0). The C/N0 is an important indicator for the performance evaluation of GNSS instruments, especially for low-cost GNSS instruments. Lastly, researchers have conducted various analyses to emphasize the distinctions in C/N0 between low-cost and geodetic GNSS instruments (Romero-Andrade, Trejo-Soto, Vega-Ayala, et al., 2021; Wielgocka et al. 2021; Paziewski 2022; Hamza et al. 2023b).
Paziewski (2022) analyzed the C/N0 for u-blox ZED-F9P GNSS receivers in combination with patch and geodetic GNSS antennas in open-sky conditions. In this research, one low-cost GNSS receiver was connected to a u-blox ANN-MB antenna, while another ZED-F9P receiver was connected to a geodetic LEIAR10 GNSS antenna. A signal splitter was used to connect the Trimble Alloy receiver with the LEIAR10 GNSS antenna, which served as a reference for comparison. The results confirmed that similar C/N0 values were obtained for the ZED-F9P + LEIAR10 and the Trimble Alloy + LEIAR10, as they shared the same geodetic antenna and were powered by the latter. However, slightly higher C/N0 values were observed for the ZED-F9P + LEIAR10 combination compared to the ZED-F9P + u-blox ANN-MB combination for GPS, BDS, and GLONASS signals. This discrepancy in C/N0 values was attributed to the quality of the patch antenna used (Fig. 1) in the case of ZED-F9P + u-blox ANN-MB.
In the study by Wielgocka et al. (2021), simultaneous 24-hour observations were conducted using both low-cost and geodetic GNSS instruments. The C/N0 values obtained from the low-cost GNSS instruments were found to be lower on average by 7.2 dBHz and 7.0 dBHz for the first and second frequencies, respectively, compared to those obtained from high-end geodetic GNSS instruments. Furthermore, the C/N0 values were analyzed for both frequencies in the case of low-cost GNSS instruments (Fig. 2). It was concluded that higher C/N0 values were evident for the first frequency across all four satellite constellations.

C/N0 as a function of satellite elevation (Paziewski 2022)

C/N0 as a function of satellite elevation angle for the u-blox receiver: (a) first frequency and (b) second frequency (Wielgocka et al. 2021)
Lastly, Hamza et al.(2023b) analyzed the C/N0 values under both open-sky and adverse conditions. Observations were collected at 1 Hz for 24 h and 4 h, respectively. The authors concluded that urban conditions had a more significant impact on low-cost GNSS instruments compared to geodetic ones, resulting in lower C/N0 values for the former. High-quality geodetic GNSS instruments consistently maintained C/N0 values higher than 25 dBHz in both conditions, even at lower elevation angles. However, this was not the case for low-cost GNSS instruments (ZED-F9P + Survey calibrated). In another study by Romero-Andrade et al. (2021a), the C/N0 of single and double-frequency low-cost GNSS receivers was evaluated specifically in urban conditions with less obstacles for receiving satellite signals. Both types of GNSS receivers exhibited C/N0 values higher than 35 dBHz, which serves as the recommended limit for C/N0 according to the International GNSS Service (IGS). Similarly, Li et al. (2023) compared the C/N0 values of three low-cost GNSS antennas in combination with a ZED-F9P GNSS receiver. Their findings indicated that the helix antenna performed better than the other antennas (patch and vertical dipole) and closely matched the performance of a geodetic GNSS antenna.
Multipath
The multipath effect is another indicator that can affect observations from low-cost GNSS receivers and subsequently the positioning quality. Recently, the code multipath analysis has been addressed by considering the code-carrier-phase (CMC) linear combination (Romero-Andrade, Trejo-Soto, Vega-Ayala, et al., 2021; Paziewski 2022; Hamza et al. 2023b; Krzan et al. 2024). The findings presented by Paziewski (2022) highlighted that low-cost GNSS instruments (ZED-F9P + ANN-MB) exhibited larger standard deviations for code multipath, as anticipated due to the use of patch antennas (Table 1). However, when geodetic GNSS antennas were used (ZED-F9P + LEIAR10), the same low-cost GNSS receivers delivered comparable or even better values of code multipath compared to geodetic GNSS instruments (Trimble Alloy + LEIAR10) (Fig. 3). Nevertheless, observations from geodetic GNSS instruments were less affected by multipath for signals received at low elevation angles, which was not the case for low-cost GNSS receivers. Notably, significant improvements in code multipath were observed for low-cost GNSS receivers after filtering out low-elevation signals. Krzan et al.( 2024) analyzed the multipath of three low-cost GNSS antennas (u-blox ANN-MB, Tallysman TW7972, and ELT0149). Their results demonstrated that using a low-cost antenna (Tallysman TW7972), which has known PCO and PCV, can yield better results.

CMC linear combination and C/N0 of X1-L1 GPS PRN 12 signals on November 17, 2020 (Paziewski 2022)
In the case of Romero-Andradde et al. (2021), the evaluation of code multipath for single and double-frequency low-cost GNSS receivers revealed that the use of such GNSS instruments in urban conditions exceeded the recommended value (0.3 m) by IGS (Fig. 4). This deviation could potentially be attributed to factors such as integrity percentage and duration of observations. Furthermore, Hamza et al.(2023b) performed simultaneous observations using geodetic and low-cost GNSS receivers to analyze the RMSE of code multipath in both open sky and urban conditions. The geodetic GNSS receivers (GD 1- Leica GS18 + LEISGS18) consistently outperformed the low-cost receivers (LC 1- ZED-F9P + Survey calibrated) in both scenarios. The RMSE for low-cost GNSS receivers was twice as high in the open sky scenario, while it reached four times higher in urban conditions, even when a geodetic antenna was used (LC 2 – ZED-F9P + JAV_RINGANT_G3T) (Table 2).

Multipath effect (MP1 and MP2). Red line: maximum value of 0.30 m for the multipath effect (Romero-Andrade, Trejo-Soto, Vega-Ayala, et al., 2021)
Cycle slips
One of the parameters that indicate the reliability of the GNSS receivers is the number of cycle slips (i.e. ambiguities) that occur during the survey, where the lowest possible number of cycle slips is desirable. In the study by Hamza et al.(2021), the number of cycle slips from low-cost GNSS receivers was analyzed and compared with geodetic GNSS receivers under open-sky conditions. It was found that the geodetic GNSS receivers exhibited a lower number of cycle slips, although the differences were not significant (Fig. 5). Romero-Andrade et al. (2021a), analyzed the number of cycle slips per observation, as evaluation criteria, the maximum of 1 cycle slip per 1000 observations was chosen, which is a recommended value by IGS. Most of the low-cost GNSS receivers and patch antennas used in the study met the IGS criteria (Fig. 6).

The number of phase ambiguities for each satellite for both low-cost GNSS receivers (red bars) as well for both geodetic GNSS receivers (blue bars): (a) GPS; (b) GLONASS, and (c) Galileo (Hamza et al. 2021b)

Cycle slips per 1000 observations. Red line: 1000/(o/slips) < 1 CSR (Romero-Andrade, Trejo-Soto, Vega-Ayala, et al., 2021)
Lastly, in the research conducted by Viler et al. (2023), the performance of the Septentrio AsteRx-U geodetic GNSS receiver was compared to u-blox receivers ZED-F9P and ZED-F9R in both static and kinematic positioning modes. Notably, the u-blox GNSS receivers consistently exhibited a higher frequency of Loss of Lock Indications (LLI) and cycle slips. This comprehensive analysis underscores the robustness and reliability of geodetic GNSS receivers, as they are significantly less likely to experience LLI and cycle slip deviations. Consequently, geodetic GNSS receivers are currently the preferred choice to minimize cycle slip occurrence both in static and kinematic positioning modes. Li et al. (2023) emphasized that low-cost GNSS instruments are more susceptible to cycle slips than their geodetic GNSS counterparts, with the cycle slip rate being up to four times higher in both static and kinematic tests. Additionally, it was concluded that patch antennas had the highest rate of cycle slips in static tests, while vertical dipole antennas had the highest rate in kinematic tests.
Phase and pseudo-range noise
The most important quantity for precise position determination in the case of GNSS is the quality of phase and pseudo-range observations on both carriers. The noise of phase and pseudo-range observations from low-cost GNSS receivers has been addressed recently (Guo et al. 2018; Hamza et al. 2021b; Paziewski 2022; Li et al. 2023). Guo et al. (2018) evaluated the noise of pseudo-range and carrier-phase observations from single-frequency GNSS receivers in different elevation angles. For the GPS constellation, pseudo-range noise varied from 16 to 29 cm with an average noise of 20.53 cm while in the case of BDS satellites, the noise was from 19 to 38 cm and an average noise of 23.03 cm. For carrier-phase observations, the noise levels were estimated to be between 0.4 mm and 1.4 mm for GPS, and between 0.8 mm and 2.6 mm for BDS. The average noise levels were determined to be 0.8 mm for GPS and 1.3 mm for BDS constellations. To assess the noise levels of pseudo-range and phase observations for the ZED-F9P GNSS chipset a zero baseline test was conducted (Paziewski 2022). The author highlighted that the phase noise was higher for the GLONASS constellation, measuring at 4.1 mm, while lower values below 2.9 mm were observed for GPS, Galileo, and BDS satellite constellations. It should be noted that in a zero baseline test, all other error sources, including multipath, are eliminated. As a result, relatively lower values of pseudo-range noise were observed (Table 3) compared to the values presented in Table 1, where the impact of both noise and multipath was present. Specifically, the pseudo-range noise was estimated to be 29 cm, 32 cm, 32 cm, and 35 cm for GPS, Galileo, BDS, and GLONASS constellations, respectively.
Hamza et al. (2021b), emphasized that low-cost dual-frequency GNSS receivers (LC 1 and LC 2 - ZED-F9P + Survey calibrated antenna) exhibited phase noise at the level of a few millimeters, which was higher compared to the geodetic GNSS receivers (GD 1 and GD 2 - Leica GS18 + LEISGS18) that were used as references (Fig. 7). Despite the slightly higher noise levels, the millimeter-level noise observed in the low-cost GNSS receivers still allowed for high-quality positioning solutions to be achieved.

RMS values of the high pass filtered L4 linear combination for all satellite systems for both low-cost GNSS receivers (red bars) as well for both geodetic GNSS receivers (blue bars): (a) GPS; (b) GLONASS, and (c) Galileo (Hamza et al. 2021b)
Lastly, Li et al. (2023) tested the ZED-F9P in combination with three different low-cost GNSS antennas in static and kinematic tests. In the static test, code noise ranged from 0.3 to 1.6 m, while phase noise reached up to 0.007 m. In the kinematic test, code noise varied from 1.8 to 2.8 m, and phase noise ranged from 0.011 to 0.034 m. Based on the results, the authors emphasized that the level of phase and code noise is influenced by the type of low-cost GNSS antenna used.
Low-cost GNSS receivers’ susceptibility to intentional jamming
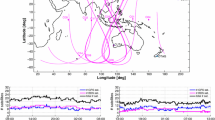
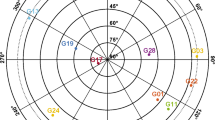
GNSS interference, jamming, and spoofing pose a tremendous threat that can significantly affect the reliability and functionality of GNSS systems, both high-precision geodetic GNSS receivers and more affordable consumer variants. Interference disrupts the reception of signals, jamming intentionally floods GNSS signals with disruptive noise, while spoofing creates deceptive, fake signals to mislead GNSS receivers. These multi-faceted challenges impact critical aerospace, land, and maritime applications. Authors who have ventured into develo** their own equipment, including drones equipped with an array of low-cost sensors such as IMUs and gyroscopes, as well as integrating low-cost GNSS receivers, are aware of the formidable obstacles posed by GNSS vulnerabilities, especially in adverse conditions. Lee et al. (2022) and Zhang et al. (2023) who developed a drone using u-blox’s GNSS module ZED-F9P, have recognized and articulated the pressing issues related to jamming and spoofing in drone operations. They have also recognized that there are only a limited number of methods to mitigate the risks associated with spoofing. Studies on interference with GNSS receivers of geodetic-grade and low-cost receivers were performed in different scenarios. Pavlovčič-Prešeren et al. (2021) tested several GNSS receivers from different locations under vertical and horizontal L1/E1 chirp jamming. They simultaneously evaluated the performance of several ZED-F9P receivers at different locations to systematically assess how these receivers performed under vertical and horizontal L1/E1 chirp jamming scenarios, to determine whether the jamming was from drones or ground-based sources, and how severe each was (Fig. 8). When the jamming source was positioned above a GNSS receiver, this resulted in a significant increase in jamming susceptibility and a significant degradation in receiver performance. This was in marked contrast to situations where the interference source was located below receivers of the same type. This performance disparity was particularly noticeable when dealing with low-cost receivers, namely ZED-F9P, which obviously did not have the sophisticated interference suppression capabilities exhibited by their geodetic counterparts.

Results of vertical jamming with chirp L1/E1 jammer from Pavlovčič-Prešeren et al. (2021) for the u-blox ZED-F9P receivers
Positioning performance
In this section are presented and summarized results from the positioning performance of low-cost GNSS receivers which provides answers for RQ 2 (What is the positioning accuracy of low-cost GNSS receivers? ). This section contains two subsections, namely, Sect. 3.1, which summarizes studies conducted in the relative positioning method, mostly reporting the positioning accuracy of single and double-frequency low-cost GNSS receivers while Sect. 3.2 contains studies which are discussing results obtained in the absolute positioning method.
Relative positioning
The relative positioning method is widely recognized for its potential to achieve high accuracy in positioning, with precision within a few millimeters, when considering phase observations. Geodetic GNSS receivers have proven their capability to deliver precise positioning solutions for both short and long baselines by using observations from multiple frequencies to mitigate errors.
Low-cost GNSS receivers have demonstrated excellent positioning performance in relative positioning over short baselines and open-sky conditions, both for single-frequency (Biagi et al. 2016; Caldera et al. 2016; Tsakiri et al. 2017) and dual-frequency GNSS receivers (Hamza et al. 2020; Hamza, Stopar and Sterle, Hamza et al. 2021b; Romero-Andrade, Trejo-Soto, Vega-Ayala, et al., 2021; Wielgocka et al. 2021). Nevertheless, achieving high positioning accuracy over long baselines remains a challenge with low-cost GNSS receivers (Tsakiri et al. 2017; Wielgocka et al. 2021).
Tsakiri et al. (2017) tested u-blox LEA-6T and NEO-7P single-frequency GNSS receivers with geodetic GNSS antennas in short and long baselines using standardized methods for evaluating GNSS receivers. The results revealed that a positioning accuracy of better than 1 cm could be achieved in short baselines of 0.5 km. Over longer baselines of 18 km, the achieved positioning accuracy was up to 2 cm. These findings demonstrate the capability of low-cost single-frequency GNSS receivers to deliver accurate positioning results in short baselines only. Biagi et al. (2016) evaluated the positioning quality of a single-frequency receiver LEA-4T with a patch antenna in an ultra-short baseline (65 m) while a geodetic GNSS instrument was used as a reference station. Observations lasted for a week and were processed in hourly sessions. For the obtained positioning solutions, an RMSE of 2.1, 4.9, and 4.5 mm was achieved for the east, north, and up components, respectively. In the case of Caldera et al. (2016), the u-blox EVK-6T receiver was evaluated using a Continous Operating Reference Station (CORS) as a base station. The evaluation focused on baselines of up to 31 km, with observations from the GPS constellation considered over 37 days. The results showed that the obtained RMSE of all spatial positions was lower than 10 mm for baselines up to 11 km. For longer baselines of 31 km, the RMSE remained below 2 cm, and for ultra-short baselines of 2.8 km, it was below 2 mm.
In case when considering low-cost dual-frequency GNSS receivers with patch antennas in open sky and ultra-short baselines, the positioning precision was below 2 and 4 mm for horizontal and vertical components, respectively, which stands true even when low-cost GNSS devices were adopted for both base and rover (Hamza et al. 2021). With the use of calibrated low-cost GNSS antennas, a high positioning accuracy was achieved in ultra-short baselines. The coordinate difference from true coordinates obtained with geodetic GNSS receivers was less than 3 mm for all three components. However, the latter showed to have higher precision and overcome low-cost GNSS receivers (Hamza et al. 2020).
In the study by Wielgocka et al.(2021) it was found that the positioning accuracy of low-cost dual-frequency GNSS receivers with patch antennas exceeded 2 cm in baselines longer than 20 km, considering various session lengths. The results showed that the accuracy improved when longer sessions (5 h) were considered but remained higher than 2 cm. The authors emphasized that the uncertainties of coordinates in relative positioning mode were much lower (< 3 mm) compared to the differences from the true coordinates, indicating that the accuracy limitations were primarily influenced by other factors. Romero-Andrade et al.(2021) pointed out that low-cost GNSS receivers when equipped with patch antennas, can achieve a positioning accuracy of 1 cm even in urban conditions. However, they noted that the vertical components of such uncalibrated antennas still pose a challenge. Similarly, the studies conducted by Hamza et al. (2020) and Wielgocka et al.(2021) have shown that the use of u-blox patch antennas with unknown phase center offset (PCO) and phase center variation (PCV) can particularly affect the height component. Conversely, when low-cost calibrated GNSS antennas are adopted, higher positioning accuracy can be achieved, in the open sky (Hamza et al. 2021b; Krietemeyer et al. 2022). Lastly, Hamza et al. (Hamza et al. 2023b) emphasized that using low-cost GNSS receivers with calibrated low-cost antennas (both base and rover) can achieve centimeter-level accuracy in urban areas, especially for short sessions (15 min) and short baselines. However, there were sessions where ambiguities were not resolved, resulting in float solutions and decimeter-level positioning accuracy. High-quality positioning remains a challenge for long baselines, especially in adverse conditions (Tomaštík and Everett 2023), even with low-cost dual-frequency GNSS receivers (Wielgocka et al. 2021).
RTK is highly valuable as it provides immediate positioning solutions without the need for post-processing. Low-cost GNSS receivers have made significant advancements in real-time positioning capabilities. Initially, real-time solutions were obtained by using external applications or software (Takasu 2018; Everett 2020). However, with the integration of RTK engines, low-cost dual-frequency GNSS receivers now have built-in support for real-time positioning, eliminating the need for additional support. Furthermore, the fast development in the field has enabled low-cost GNSS receivers to provide real-time positioning solutions even in PPP mode.
RTK presents challenges in terms of algorithm complexity and real-time data processing, as well as the impact of various error sources such as multipath and limited satellite availability, which are more evident in urban areas. Low-cost GNSS receivers, in particular, face additional challenges due to their lower quality compared to geodetic GNSS receivers. Numerous studies have been conducted by researchers to assess the accuracy of real-time positioning using low-cost GNSS devices in different scenarios, including open-sky environments (Cina and Piras 2015; Bellone et al. 2016; Odolinski and Teunissen 2016, 2017a, b, 2020; Guo et al. 2018; Broekman and Gräbe 2021; Nguyen, Cho and Hayashi, 2021a) and urban conditions (Jackson et al. 2018; Janos and Kuras 2021; Wielgocka et al. 2021).
An early study by Cina and Piras (2015) showed that single-frequency low-cost GNSS receivers when paired with low-cost GNSS antennas, can effectively work in real-time and achieve competitive performance compared to geodetic GNSS receivers in short baselines (< 1 km). The authors highlighted that a sufficient acquisition time of more than 10 min is required for optimal results. In terms of accuracy, for ultra-short baselines (5 m) and short baselines (4 km), the horizontal accuracy can reach sub-centimeter levels for GPS and BDS constellations. However, the vertical component for BDS exhibited accuracy exceeding the centimeter level, which was not observed for GPS (Guo et al. 2018). Similarly, Semler et al. (2019), reported that spatial accuracy of 1 cm is possible in the open sky, even when using patch antennas. Slightly better results were obtained in the case of considering the geodetic Trimble R10 antenna. Odolinski and Teunissen (2017b) demonstrated that by using a geodetic antenna with the EVK-M8T (L1 + B1) receiver, both the positioning and ambiguity resolution performance can be improved, approaching the level of high-end GNSS receivers, specifically for a 7 km baseline. Similar results were obtained when patch antennas were used but only in high elevation angles (Odolinski and Teunissen 2016). Furthermore, tests conducted according to ISO-17123-8 standards showed that single-frequency receivers can meet the specified criteria and compete with geodetic GNSS receivers in short baselines only (Garrido-Carretero et al. 2019).
Bellone et al. (2016) found that positioning accuracy decreases in longer baselines (20 km), and they recommend the use of corrections from a Virtual Reference Station (VRS) to improve the positioning accuracy. Odololinski and Teunissen (2020) highlighted that dual-frequency GNSS receivers are not competitive with geodetic receivers in long baselines and observed a degradation in performance. Broekman and Grabe (2021) showed that a low-cost real-time kinematic geolocation service provides centimeter accuracy up to 15 km from the base station. They achieved reliable RTK performance with a horizontal accuracy of 14 mm, irrespective of the distance from the RTK base station. In their research, they mention that u-blox ZED-F9P receivers do support a moving RTK base station configuration. In urban conditions, Wielgocka et al. (2021) reported that the positioning precision specified by the manufacturer (1 cm + 1 ppm) was not achieved with low-cost GNSS receivers, and the precision degraded further when both the rover and base consisted of low-cost GNSS receivers. Additionally, low-cost GNSS receivers face challenges with insufficient sky visibility and lack the ability to assess the quality of positioning solutions or effectively mitigate multipath effects (Janos and Kuras 2021). However, reconfiguring this receiver with a geodetic antenna greatly improved the quality of the results. Sanna et al. (2022) followed up on previous studies by testing the kinematic performance of RTK and post-processing of two vehicles in two different environments, once in a non-urban area with a long baseline of about 30 km with varying visibility and screened locations, and once in an urban area within a radius of about 10 km with some buildings and open areas. Their experiences, especially the outcomes, with over 95% of solutions fixed in real-time and a rapid time-to-fix upon reacquisition, typically ranging from just 1 to 2 s, were promising for low-cost kinematic applications. Furthermore, the real-time kinematic solutions demonstrated strong concordance with post-processed data, revealing that less than 5% of disparities exceeded 30 mm in the horizontal component and 100 mm in the vertical component.
Absolute positioning
In studies that evaluated low-cost GNSS receivers in the PPP method, lower positioning accuracy was generally reported compared to the relative method (Hamza et al. 2021b; Romero-Andrade, Trejo-Soto, Vázquez-Ontiveros, et al., 2021; Romero-Andrade, Trejo-Soto, Vega-Ayala, et al., 2021; Wielgocka et al. 2021; Krietemeyer et al. 2022; Paziewski 2022). In the study conducted by Hamza et al. (2021b), simultaneous observations were acquired using Tallysman TW3882 and Survey calibrated antennas with the ZED-F9P GNSS chipset in open-sky conditions. Sub-centimeter RMSE was reported for easting and northing, but the RMSE for ellipsoid height exceeded one centimeter for both antennas. The Survey calibrated antenna performed better, showing smaller RMSE and mean absolute error (MAE), while the Tallysman TW3882 antenna, which lacked known calibration parameters from IGS, exhibited larger errors. In Krietemeyer et al. (2022), it was found that applying a field calibration procedure to patch antennas improved the positioning performance in PPP mode with low-cost GNSS receivers, bringing it closer to that of high-geodetic GNSS antennas. Moreover, it was reported that the RMSE of Zenith Tropospheric Delay (ZTD) estimated in PPP mode using patch antennas ranged from 15 to 24 mm, but this error was reduced after applying PCV correction (Krietemeyer et al. 2020). Marut et al. (2024) highlighted that the PCOs of low-cost GNSS antennas may not agree even though the same type of low-cost antennas were used, the differences in vertical components reached up to 25 mm. Krzan et al. (2024) emphasized that using geodetic GNSS antennas significantly enhances the positioning accuracy of low-cost GNSS receivers in PPP. They reported that the positioning accuracy obtained with geodetic GNSS antennas was two to three times superior compared to the accuracy achieved using low-cost GNSS antennas. According to Romero-Andrade et al. (2021a), the precision of low-cost dual-frequency GNSS receivers in PPP mode can reach the centimeter level when open-sky conditions are ensured, even though the used ANN-MB antenna was found to have a poor design for multipath mitigation. The authors recommended a sampling rate of 1s to achieve centimeter-level positioning precision in PPP. However, Wielgocka et al. (2021) reported that in short sessions, low-cost GNSS receivers can provide centimeter-level precision only under favorable conditions, while in challenging conditions with more multipath, sub-decimeter accuracy can be achieved.
A limited number of studies have evaluated low-cost receivers in RTK-PPP, with reported decimeter-level positioning accuracy achieved in kinematic tests (Nie et al. 2020; Elmezayen and El-Rabbany 2021; Li et al. 2023; Amalfitano et al. 2024) while higher accuracy is reported in static tests (Robustelli et al. 2023). A novel method has been proposed to enhance convergence time by applying corrections to single-frequency code and double-code and phase observations, resulting in higher positioning precision (Nie et al. 2020). Furthermore, observations from four satellite constellations have been shown to improve the positioning accuracy of low-cost GNSS receivers to the decimeter level (Elmezayen and El-Rabbany 2021). Lastly, Robustelli et al. (2023) emphasized that low-cost GNSS receivers, when paired with correction services, can now attain a fixed solution in PPP-RTK within just 60 s, yielding positioning accuracy of sub-decimeter level. Moreover, they highlighted that PPP-RTK represents a superior and more practical approach to meet navigation needs across various kinematic applications. This is because it eliminates the necessity for additional reference stations to supply corrections, resulting in further cost reduction. Li et al.(2023) proposed a mixed-frequency PPP-RTK model, which significantly improved the positioning accuracy of low-cost GNSS receivers from 0.53 to 0.07 m. In addition, the performance of three different low-cost GNSS antennas (patch, helix, and vertical dipole) was compared in static and kinematic tests. The results indicated that the vertical dipole antenna provided superior positioning accuracy in static tests, with errors of 0.02 m for the north component, 0.01 m for the east component, and 0.07 m for the up component. Conversely, in kinematic tests, the helix antenna demonstrated better performance, with positioning accuracy of 0.07 m for both the north and east components and 0.34 m for the up component.
Discussion
For two decades, low-cost GNSS receivers operating on a single frequency have been available in the market. After the phase observations from these sensors became accessible, they began to be applied in high-precision applications (Lipatnikov and Shevchuk 2019). The primary constraint of single-frequency GNSS receivers was their inability to track satellite signals in second frequency, which restricted their application in short baselines. Low-cost single-frequency GNSS receivers could achieve sufficient positioning accuracy using the relative positioning method, but only for short baselines and under open-sky conditions. In baselines longer than 20 km, the quality of positioning deteriorates due to the ionospheric bias (Caldera et al. 2016; Tsakiri et al. 2017). In short baselines, low-cost GNSS receivers demonstrated comparable performance to geodetic GNSS receivers in the RTK method. However, these low-cost GNSS receivers lacked integrated RTK engines and therefore required additional support to address this limitation (Garrido-Carretero et al. 2019).
A few years ago, dual-frequency low-cost GNSS receivers entered the mass market, as a result, many researchers started to test and compare their performance against high-quality geodetic GNSS receivers. While the quality of observations obtained from low-cost dual-frequency GNSS receivers is inferior to that of geodetic GNSS receivers, the differences in positioning quality are not significant., i.e. low-cost dual-frequency GNSS receivers can obtain positioning quality comparable to high-end geodetic counterparts (Hamza et al. 2023b). Moreover, the introduction of low-cost calibrated GNSS antennas has further enhanced the positioning accuracy of low-cost GNSS receivers (Hamza et al. 2021b). These GNSS sensors can now offer reliable positioning solutions for extended periods and in remote areas (Hamza et al. 2023a). Unlike before, there is no need for additional support to enable operation in RTK and PPP-RTK methods, as these receivers are capable of working in both positioning techniques (Hohensinn et al. 2022; Hamza et al. 2023a). Additionally, they can be easily configured with various smartphone applications, making them more accessible to a wider range of users (Ardusimple 2023).
Despite advancements, surveying in urban areas continues to pose challenges for low-cost GNSS receivers. In environments with obstructed sky views and the presence of multipath, the positioning quality in RTK is known to decrease (Janos and Kuras 2021; Wielgocka et al. 2021; Hamza et al. 2023b). Furthermore, the positioning accuracy of low-cost GNSS receivers in both RTK and static relative methods does not reach the same level as that of geodetic GNSS receivers in long baselines (Wielgocka et al. 2021). The possibility of using VRS is shown to further enhance the performance of low-cost dual-frequency GNSS receivers in RTK (Hamza et al. 2023b). Sub-decimeter positioning accuracy is now possible in PPP-RTK (Hohensinn et al. 2022) while better results are reported in PPP when long sessions and open-sky conditions are considered (Hamza et al. 2021b).
Low-cost GNSS receivers are not as sophisticated as geodetic GNSS receivers, however, considering their price, they are argued as an alternative to geodetic GNSS counterparts for many applications and projects (Tsakiri et al. 2018; Šegina et al. 2020; Broekman and Gräbe 2021; Hamza et al. 2023a, b; Vidal et al. 2024). Recently, low-cost GNSS receivers have been used in various fields such as surveying and map** (Tsakiri et al. 2017, 2018), monitoring of natural hazards (Glabsch et al. 2009; Hamza et al. 2023a) and engineering structures (Poluzzi et al. 2020; Manzini et al. 2022), agriculture (Garrido-Carretero et al. 2020; Nguyen, Cho and Hayashi, 2021b; Tayebi et al. 2021; Nguyen and Cho 2023), automotive applications (Zuliani et al. 2022), atmosphere modeling (Bramanto et al. 2018; Kogogin et al. 2021; Okoh et al. 2021, 2024), GNSS reflectometry (Ichikawa et al. 2019; Rover and Vitti 2019; Fagundes et al. 2021; Li et al. 2021) and they were also included in many interference tests (jamming and spoofing) (Dimc et al. 2021; Lee et al. 2022; Zhang et al. 2023) and others. The advantages and disadvantages of their general use in surveying are listed in Table 4.
More recently, low-cost multi-frequency GNSS receivers have become available in the market, enabling observations in three frequencies from all satellite constellations (Ardusimple 2023; Septentrio 2023). The ability to use more observations will further enhance their overall performance and application.
Conclusion
Low-cost GNSS receivers are increasingly being considered as an alternative to geodetic GNSS receivers and have been recently used in many applications. With advancements in technology, these sensors have become more accessible to a wide range of users and have enabled high-quality positioning at reduced costs.
This review article provides a comprehensive overview of the observation quality and positioning performance of low-cost GNSS receivers while the main conclusions can be summarized as follows.
RQ1 (What is the observation quality of low-cost GNSS receivers? ): Low-cost GNSS receivers generally exhibit lower observation quality compared to geodetic GNSS receivers in both open sky and urban conditions. This stands true for all analyzed factors (carrier-to-noise ratio, multipath, cycle slips, phase, and pseudo-range noise, and susceptibility to intentional jamming). Adverse conditions were shown to impact significantly low-cost GNSS receivers and degrade the observation quality.
RQ2 (What is the positioning accuracy of low-cost GNSS receivers? ): In terms of positioning accuracy, low-cost GNSS receivers perform comparably to geodetic counterparts in static relative and RTK methods under open sky conditions and for short baselines. Sub-centimeter accuracy can be achieved in the static relative method while few centimeters accuracy is possible in RTK if open sky conditions are guaranteed. However, for longer baselines and areas with obstructed sky views, low-cost GNSS receivers still can’t achieve the same positioning quality as geodetic GNSS receivers. The positioning accuracy can reach a couple of centimeters in PPP in case open sky conditions and long sessions are considered, the positioning accuracy degrades more in PPP-RTK.
The current trends in GNSS receivers are to minimize their size, cost, electricity consumption and increase the quality of delivered positioning solutions. The emergence of low-cost multi-frequency GNSS receivers in the market is expected to further enhance positioning quality. This will likely lead to even more increased use of low-cost GNSS technology in various engineering fields, applications, and scientific research. In the upcoming years, low-cost GNSS technology is expected to become increasingly accessible and widely utilized, effectively meeting the growing demand for positioning and navigation.
Data availability
No datasets were generated or analysed during the current study.
References
Amalfitano D et al (2024) Designing and Testing an IoT low-cost PPP-RTK augmented GNSS Location device. Sensors 24(2):646. https://doi.org/10.3390/s24020646
Ardusimple (2023) Ardusimple. https://www.ardusimple.com/
Bellone T et al (2016) Real-time monitoring for fast deformations using GNSS low-cost receivers. Geomatics Nat Hazards Risk 7(2):458–470. https://doi.org/10.1080/19475705.2014.966867
Biagi L, Grec F, Negretti M (2016) Low-cost GNSS receivers for local monitoring: experimental Simulation, and analysis of displacements. Sensors 16(12):16. https://doi.org/10.3390/s16122140
Bramanto B et al (2018) ‘Sensing of the atmospheric variation using Low Cost GNSS Receiver’, IOP Conference Series: Earth and Environmental Science, 149(1). https://doi.org/10.1088/1755-1315/149/1/012073
Broekman A, Gräbe PJ (2021) A low-cost, mobile real-time kinematic geolocation service for engineering and research applications’, HardwareX, 10. https://doi.org/10.1016/j.ohx.2021.e00203
Caldera S et al (2016) Experimental study on low-cost Satellite-Based Geodetic monitoring over short baselines. J Surv Eng 142(3). https://doi.org/10.1061/(ASCE)SU.1943-5428.0000168
Cina A, Piras M (2015) Performance of low-cost GNSS receiver for landslides monitoring: test and results’, Geomatics, Natural hazards and Risk. Taylor Francis 6(5–7):497–514. https://doi.org/10.1080/19475705.2014.889046
Dimc F, Pavlovčič-Prešeren P, Bažec M (2021) Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and low-cost GNSS receivers. Sensors 21(16):5257. https://doi.org/10.3390/s21165257
Elmezayen A, El-Rabbany A (2021) Performance Assessment of Real-Time Multiconstellation GNSS PPP using a low-cost dual-frequency GNSS Module. Artif Satellites 56(3):37–56. https://doi.org/10.2478/arsa-2021-0005
Everett T (2020) RTKLIB Demo5_b33b. https://rtkexplorer.com/downloads/rtklib-code/
Fagundes MAR et al (2021) An open-source low-cost sensor for SNR-based GNSS reflectometry: design and long-term validation towards sea-level altimetry. GPS Solutions 25(2):73. https://doi.org/10.1007/s10291-021-01087-1
Garrido-Carretero M et al (2019) S Low-cost GNSS receiver in RTK positioning under the standard ISO-17123-8: a feasible option in geomatics. Measurement 137 168–178 https://doi.org/10.1016/j.measurement.2019.01.045
Garrido-Carretero MS et al (2020) Is GNSS real-time positioning a reliable option to validate erosion studies at olive grove environments? Span J Agricultural Res 18(2):1–11. https://doi.org/10.5424/sjar/2020182-15752
Glabsch J, Heunecke O, Schuhbäck S (2009) Monitoring the Hornbergl landslide using a recently developed low cost GNSS sensor network. J Appl Geodesy 3(3):179–192. https://doi.org/10.1515/JAG.2009.019
Guo L, ** C, Liu G (2018) Evaluation on measurement performance of low-cost GNSS receivers. 2017 3rd IEEE Int Conf Comput Commun ICCC 2017 2018–Janua:1067–1071. https://doi.org/10.1109/CompComm.2017.8322706
Hamza V et al (2020) Testing multi-frequency low-cost GNSS receivers for Geodetic Monitoring purposes. Sensors 20(16):16. https://doi.org/10.3390/s20164375
Hamza V et al (2021) Performance evaluation of low-cost Multi-frequency GNSS receivers and antennas for Displacement Detection. Appl Sci 11(14):22. https://doi.org/10.3390/app11146666
Hamza V, Stopar B, Sterle O (2021b) Testing the performance of Multi-frequency low-cost GNSS receivers and antennas. Sensors 21(6):16. https://doi.org/10.3390/s21062029
Hamza V et al (2023a) A cost-effective GNSS solution for continuous monitoring of landslides. Remote Sens 15(9):2287. https://doi.org/10.3390/rs15092287
Hamza V et al (2023b) Low-cost dual-frequency GNSS receivers and antennas for Surveying in Urban Areas. Sensors 23(5):19. https://doi.org/10.3390/s23052861
Hohensinn R et al (2022) Low-cost GNSS and real-time PPP: assessing the Precision of the u-blox ZED-F9P for kinematic monitoring applications. Remote Sens 14(20):1–25. https://doi.org/10.3390/rs14205100
Ichikawa K et al (2019) Low-cost GNSS-R altimetry on a UAV for Water-Level measurements at Arbitrary Times and locations. Sensors 19(5):998. https://doi.org/10.3390/s19050998
Jackson J, Davis B, Gebre-Egziabher D (2018) ‘A performance assessment of low-cost RTK GNSS receivers’, 2018 IEEE/ION Position, Location and Navigation Symposium, PLANS 2018 - Proceedings. IEEE, pp. 642–649. https://doi.org/10.1109/PLANS.2018.8373438
Janos D, Kuras P (2021) Evaluation of low-cost GNSS Receiver under demanding conditions in RTK Network Mode. Sens (Switzerland). 201https://doi.org/10.3390/s21165552
Kogogin D, A et al (2021) Capacities of TEC measurements by the low-cost GNSS receiver based on the u-blox ZED-F9P for ionospheric research. J Phys: Conf Ser 1991(1):012020. https://doi.org/10.1088/1742-6596/1991/1/012020
Krietemeyer A et al (2020) High quality zenith tropospheric delay estimation using a low-cost dual-frequency receiver and relative antenna calibration. Remote Sens 12(9). https://doi.org/10.3390/RS12091393
Krietemeyer A et al (2022) A field calibration solution to Achieve High-Grade-Level performance for low-cost dual-frequency GNSS Receiver and Antennas. Sensors 22(6). https://doi.org/10.3390/s22062267
Krzan G, Dawidowicz K, Paziewski J (2024) Low-cost GNSS antennas in precise positioning: a focus on multipath and antenna phase center models. Springer Berlin Heidelberg 28(3):103. GPS Solutions10.1007/s10291-024-01645-3
Lee D-K, Nedelkov F, Akos DM (2022) Assessment of Android Network Positioning as an Alternative Source of Navigation for Drone Operations. Drones 6(2):35. https://doi.org/10.3390/drones6020035
Leick A, Rapoport L, Tatrnikov D (2015) GPS satellite surveying. Fourth Edi. John Wiley & Sons,Inc., Hoboken, New Jersey
Li Y et al (2021) Development of a GNSS-IR instrument based on low-cost positioning chips and its performance evaluation for estimating the reflector height. GPS Solutions 25(4):127. https://doi.org/10.1007/s10291-021-01163-6
Li X et al (2023) Performance analysis of frequency-mixed PPP-RTK using low-cost GNSS chipset with different antenna configurations. Satell Navig 4(1):26. https://doi.org/10.1186/s43020-023-00116-3
Lipatnikov LA, Shevchuk SO (2019) Cost effective precise positioning with GNSS. https://www.fig.net/resources/publications/figpub/pub74/figpub74.asp
Manzini N et al (2022) Performance analysis of low-cost GNSS stations for structural health monitoring of civil engineering structures. Struct Infrastruct Eng 18(5):595–611. https://doi.org/10.1080/15732479.2020.1849320
Marut G, Hadas T, Nosek J (2024) Intercomparison of multi-GNSS signals characteristics acquired by a low-cost receiver connected to various low-cost antennas. GPS Solutions 28(2):82. https://doi.org/10.1007/s10291-024-01628-4
Nguyen N (2023) Performance evaluation of a typical low-cost Multi-frequency Multi-GNSS device for Positioning and Navigation in Agriculture—Part 2: dynamic testing’, AgriEngineering. 5(1):127–140. https://doi.org/10.3390/agriengineering5010008. ChoW.
Nguyen N, Van, Cho W, Hayashi K (2021a) ‘Performance evaluation of a typical low-cost multi-frequency multi-GNSS device for positioning and navigation in agriculture – Part 1: Static testing’, Smart Agricultural Technology, p. 100004. https://doi.org/10.1016/j.atech.2021.100004
Nguyen N, Van, Cho W, Hayashi K (2021b) Performance evaluation of a typical low-cost multi-frequency multi-GNSS device for positioning and navigation in agriculture – part 1: static testing’, Smart Agricultural Technology. Elsevier B V 1(July):100004. https://doi.org/10.1016/j.atech.2021.100004
Nie Z, Liu F, Gao Y (2020) Real-time precise point positioning with a low-cost dual-frequency GNSS device’, GPS solutions. https://doi.org/10.1007/s10291-019-0922-3
Odolinski R, Teunissen PJG (2016) Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: a low-cost and high-grade receivers GPS-BDS RTK analysis. J Geodesy Springer Berlin Heidelberg 90(11):1255–1278. https://doi.org/10.1007/s00190-016-0921-x
Odolinski R, Teunissen PJG (2017a) Low-cost, 4-system, precise GNSS positioning: a GPS, Galileo, BDS and QZSS ionosphere-weighted RTK analysis. Meas Sci Technol IOP Publishing 28(12). https://doi.org/10.1088/1361-6501/aa92eb
Odolinski R, Teunissen PJG (2017b) Low-cost, high-precision, single-frequency GPS–BDS RTK positioning’, GPS solutions. Springer Berlin Heidelberg 21(3):1315–1330. https://doi.org/10.1007/s10291-017-0613-x
Odolinski R, Teunissen PJG (2020) Best integer equivariant estimation performance analysis using real data collected by low-cost single and dualfrequency multiGNSS receivers for short to long-baseline RTK positioning.pdf. J Geodesy 17. https://doi.org/10.1007/s00190-020-01423-2
Okoh D et al (2021) New results of ionospheric total electron content measurements from a low-cost global navigation satellite system receiver and comparisons with other data sources. Adv Space Res COSPAR 68(9):3835–3845. https://doi.org/10.1016/j.asr.2021.07.018
Okoh D et al (2024) Assessment of the performance of the TOPGNSS and ANN-MB antennas for ionospheric measurements using low-cost u-blox GNSS receivers’, Geodesy and Geodynamics. Editorial Office Geodesy Geodyn 15(3):291–301. https://doi.org/10.1016/j.geog.2023.11.002
Pavlovčič-Prešeren P, Dimc F, Bažec M (2021) A comparative analysis of the response of GNSS receivers under Vertical and Horizontal L1/E1 chirp jamming. Sensors 21(4):1446. https://doi.org/10.3390/s21041446
Paziewski J (2022) Multi-constellation single-frequency ionospheric-free precise point positioning with low-cost receivers’, GPS solutions. https://doi.org/10.1007/s10291-021-01209-9
Poluzzi L et al (2020) Low-cost GNSS sensors for monitoring applications. Appl Geomatics 12(S1):35–44. https://doi.org/10.1007/s12518-019-00268-5
Robustelli U, Cutugno M, Pugliano G (2023) Low-cost GNSS and PPP-RTK: investigating the capabilities of the u-blox ZED-F9P Module. Sensors 23(13):6074. https://doi.org/10.3390/s23136074
Romero-Andrade R, Trejo-Soto ME, Vázquez-Ontiveros JR et al (2021) Sampling rate impact on Precise Point Positioning with a low-cost GNSS Receiver. Appl Sci 11(16):17. https://doi.org/10.3390/app11167669
Romero-Andrade R, Trejo-Soto ME, Vega-Ayala A et al (2021a) Positioning evaluation of single and dual-frequency low-cost gnss receivers signals using ppp and static relative methods in urban areas. Appl Sci (Switzerland) 11(22). https://doi.org/10.3390/app112210642
Rover S, Vitti A (2019) GNSS-R with low-cost receivers for Retrieval of Antenna Height from Snow surfaces using single-frequency observations. Sensors 19(24):5536. https://doi.org/10.3390/s19245536
Sanna G, Pisanu T, Garau S (2022) Behavior of low-cost receivers in Base-Rover configuration with Geodetic-Grade antennas. Sensors 22(7):2779. https://doi.org/10.3390/s22072779
Šegina E et al (2020) Monitoring surface displacement of a deep-seated landslide by a low‐cost and near real‐time GNSS system. Remote Sens 12(20):1–26. https://doi.org/10.3390/rs12203375
Semler Q et al (2019) ‘Development of a low-cost centimetric GNSS positioning solution for android applications’, in International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives. Strasbourg, pp. 309–314. https://doi.org/10.5194/isprs-archives-XLII-2-W17-309-2019
Septentrio (2023) Mosaic-X5. https://www.septentrio.com/en/products/gps/gnss-receiver-modules/mosaic-x5
Sterle O, Stopar B, Pavlovčič Prešeren P (2015) Single-frequency precise point positioning: an analytical approach. J Geodesy 89(8):793–810. https://doi.org/10.1007/s00190-015-0816-2
Takasu T (2018) RTKLIB: An Open Source Program Package for GNSS Positioning. http://www.rtklib.com/
Tayebi A et al (2021) Low-cost experimental application of real-time kinematic positioning for increasing the benefits in cereal crops. Int J Agricultural Biol Eng 14(3):194–199. https://doi.org/10.25165/j.ijabe.20211403.5812
Teunissen PJG, Montenbruck O (2017) Springer Handbook oƒ Global Navigation Satellite systems. Springer Int Publishing AG. https://doi.org/10.1007/978-3-319-42928-1
Tomaštík J, Everett T (2023) Static positioning under Tree Canopy using low-cost GNSS receivers and adapted RTKLIB Software. Sensors 23(6):3136. https://doi.org/10.3390/s23063136
Tsakiri M, Sioulis A, Piniotis G (2017) Compliance of low-cost, single-frequency GNSS receivers to standards consistent with ISO for control surveying. Int J Metrol Qual Eng. 810.1051/ijmqe/2017006
Tsakiri M, Sioulis A, Piniotis G (2018) The use of low-cost, single-frequency GNSS receivers in map** surveys. Surv Rev Taylor Francis 50(358):46–56. https://doi.org/10.1080/00396265.2016.1222344
Vidal M et al (2024) Cost-efficient Multi-GNSS Station with Real-Time transmission for Geodynamics Applications. Remote Sens 16(6):991. https://doi.org/10.3390/rs16060991
Viler F et al (2023) The efficiency of Geodetic and low-cost GNSS devices in Urban Kinematic Terrestrial Positioning in terms of the Trajectory generated by MMS. Remote Sens 15(4). https://doi.org/10.3390/rs15040957
Weston N, Schwieger V (2010) Cost Effective GNSS Positioning Techniques. https://www.fig.net/resources/publications/figpub/pub49_2ed/Figpub49_2ndedition.pdf
Wielgocka N et al (2021) Feasibility of using low-cost dual-frequency gnss receivers for land surveying. Sensors 21(6):1–14. https://doi.org/10.3390/s21061956
Zhang C et al (2023) A Lightweight and Drift-Free Fusion Strategy for Drone Autonomous and Safe Navigation. Drones 7(1):34. https://doi.org/10.3390/drones7010034
Zuliani D et al (2022) LZER0: a cost-effective multi-purpose GNSS platform. Sensors 22(21):8314. https://doi.org/10.3390/s22218314
Acknowledgements
The authors acknowledge the support from the Slovenian Research Agency-ARIS (research core funding no.P2-0027, Geoinformation Infrastructure and Sustainable Spatial Development of Slovenia; research core funding no.P1-0419, Dynamic Earth; research core funding no. J2-2489, SLOKIN-Geokinematic model of Slovenian Territory. We are thankful to Antonino Zichichi (President of the World Federation of Scientists) and the Slovenian Science Foundation for their support.
Author information
Authors and Affiliations
Contributions
conceptualization V.H; methodology V.H; investigation V.H and P.P-P; visualization V.H.draft preparation V.H and P.P-P, review and editing V.H, B.S, O.S., and P.P-P.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Stopar, B., Sterle, O., Pavlovčič-Prešeren, P. et al. Observations and positioning quality of low-cost GNSS receivers: a review. GPS Solut 28, 149 (2024). https://doi.org/10.1007/s10291-024-01686-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-024-01686-8