
Abstract
Structural topology optimization has seen many methodological advances in the past few decades. In this work we focus on continuum-based structural topology optimization and more specifically on geometric feature based approaches, also known as explicit topology optimization, in which a design is described as the assembly of simple geometric components that can change position, size and orientation in the considered design space. We first review various recent developments in explicit topology optimization. We then describe in details three of the reviewed frameworks, which are the Geometry Projection method, the Moving Morphable Components with Esartz material method and Moving Node Approach. Our main contribution then resides in the proposal of a theoretical framework, called Generalized Geometry Projection, aimed at unifying into a single formulation these three existing approaches. While analyzing the features of the proposed framework we also provide a review of smooth approximations of the maximum operator for the assembly of geometric features. In this context we propose a saturation strategy in order to solve common difficulties encountered by all reviewed approaches. We also explore the limits of our proposed strategy in terms of both simulation accuracy and optimization performance on some numerical benchmark examples. This leads us to recommendations for our proposed approach in order to attenuate common discretization induced effects that can alter optimization convergence.


























Similar content being viewed by others

Notes
Additional variable \(m_i\) is introduced in the geometry projection approach to make a component vanish in the same way as it is done in density based approaches.
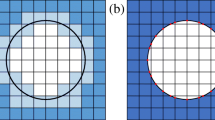
Here we consider only \(dx\times dx\) uniform meshes, but the presented framework is also valid for non uniform and irregular mesh. Moreover, note that the sampling window shape can eventually be shaped as the finite element mesh considering a slightly different formula in the sampling window definition that we won’t detail here for conciseness.
As a special case one could assemble geometric primitives before computing the local volume fractions. In this case the vectors of local volume fraction reduces to scalars computed that are unchanged by geometric assembly.
This demonstration only applys to the case of \(dx \times dx\) uniform meshes. The same demonstration can be easily extended to \(dx \times dy\) uniform meshes simply changing sampling window definition. For the general situation of non uniform irregular meshes, to recover the MMC formulation one should define local sampling window shapes and a more elastic numerical integration scheme based on triangulation.
The reader can note that the same result can also be obtained selecting \(p\rightarrow \infty\), 1 Gauss point, \(R=\frac{1}{2}dx\) and \(W_i^{el}={\delta }_i^{el}\) of Eq. (23).
The characteristic function of the union of sets can be easily computed as the maximum of the characteristic functions of each set. The same can be stated for TDFs.
Note that this property can be beneficial or detrimental, depending on the case. Using classic MMA one can either skip worse local optima or better ones in the convergence history.
References
Allaire G, Jouve F, Toader AM (2004) Structural optimization using sensitivity analysis and a level-set method. J Comput Phys 194(1):363–393
Altman NS (1992) An introduction to kernel and nearest-neighbor nonparametric regression. Am Stat 46(3):175–185
Bell B, Norato J, Tortorelli D (2012) A geometry projection method for continuum-based topology optimization of structures. In: 12th AIAA aviation technology, integration, and operations (ATIO) conference and 14th AIAA/ISSMO multidisciplinary analysis and optimization conference. vol 5485
Bendsøe MP (1989) Optimal shape design as a material distribution problem. Struct Optim 1(4):193–202
Bendsøe MP, Kikuchi N (1988) Generating optimal topologies in structural design using a homogenization method. Comput Methods Appl Mech Eng 71(2):197–224
Bendsøe MP, Sigmund O (1995) Optimization of structural topology, shape, and material, vol 414. Springer, Berlin
Borrvall T (2001) Topology optimization of elastic continua using restriction. Arch Comput Methods Eng 8(4):351–385
Cai S, Zhang W, Zhu J, Gao T (2014) Stress constrained shape and topology optimization with fixed mesh: a b-spline finite cell method combined with level set function. Comput Methods Appl Mech Eng 278:361–387
Chen J, Shapiro V, Suresh K, Tsukanov I (2007) Shape optimization with topological changes and parametric control. Int J Numer Methods Eng 71(3):313–346
Chen S, Wang MY, Liu AQ (2008) Shape feature control in structural topology optimization. Comput Aided Des 40(9):951–962
Cheng G, Mei Y, Wang X (2006) A feature-based structural topology optimization method. In: IUTAM symposium on topological design optimization of structures, machines and materials, Springer, pp 505–514
Deng J, Chen W (2016) Design for structural flexibility using connected morphable components based topology optimization. Sci China Technol Sci 59(6):839–851
Duysinx P, Sigmund O (1998) New developments in handling stress constraints in optimal material distribution. In: 7th AIAA/USAF/NASA/ISSMO symposium on multidisciplinary analysis and optimization, p 4906
Eschenauer HA, Kobelev VV, Schumacher A (1994) Bubble method for topology and shape optimization of structures. Struct Optim 8(1):42–51
Guo H, Zhao K, Wang MY (2005) A new approach for simultaneous shape and topology optimization based on dynamic implicit surface function. Control Cybern 34:255–282
Guo X, Zhang W, Zhang J, Yuan J (2016) Explicit structural topology optimization based on moving morphable components (mmc) with curved skeletons. Comput Methods Appl Mech Eng 310:711–748
Guo X, Zhang W, Zhong W (2014) Doing topology optimization explicitly and geometrically–a new moving morphable components based framework. J Appl Mech 81(8):081009
Guo X, Zhou J, Zhang W, Du Z, Liu C, Liu Y (2017) Self-supporting structure design in additive manufacturing through explicit topology optimization. Comput Methods Appl Mech Eng 323:27–63
Hoang VN, Jang GW (2017) Topology optimization using moving morphable bars for versatile thickness control. Comput Methods Appl Mech Eng 317:153–173
Hou W, Gai Y, Zhu X, Wang X, Zhao C, Xu L, Jiang K, Hu P (2017) Explicit isogeometric topology optimization using moving morphable components. Comput Methods Appl Mech Eng 326:694–712
Kazemi H, Vaziri A, Norato JA (2018) Topology optimization of structures made of discrete geometric components with different materials. J Mech Des 140(11):111401
Kennedy GJ, Hicken JE (2015) Improved constraint-aggregation methods. Comput Methods Appl Mech Eng 289:332–354
Kreisselmeier G, Steinhauser R (1980) Systematic control design by optimizing a vector performance index. In: Computer aided design of control systems, Elsevier, pp 113–117
Kreissl S, Maute K (2012) Levelset based fluid topology optimization using the extended finite element method. Struct Multidiscip Optim 46(3):311–326
Lei X, Liu C, Du Z, Zhang W, Guo X (2019) Machine learning-driven real-time topology optimization under moving morphable component-based framework. J Appl Mech 86(1):011004
Lin HY, Rayasam M, Subbarayan G (2015) Isocomp: unified geometric and material composition for optimal topology design. Struct Multidiscip Optim 51(3):687–703
Liu C, Du Z, Zhang W, Zhu Y, Guo X (2017) Additive manufacturing-oriented design of graded lattice structures through explicit topology optimization. J Appl Mech 84(8):081008
Liu C, Zhu Y, Sun Z, Li D, Du Z, Zhang W, Guo X (2018) An efficient moving morphable component (mmc)-based approach for multi-resolution topology optimization. ar**v preprint ar**v:1805.02008
Liu J, Gaynor AT, Chen S, Kang Z, Suresh K, Takezawa A, Li L, Kato J, Tang J, Wang CC (2018) Current and future trends in topology optimization for additive manufacturing. Struct Multidiscip Optim 57:1–27
Liu J, Ma Y (2016) A survey of manufacturing oriented topology optimization methods. Adv Eng Softw 100:161–175
Liu T, Wang S, Li B, Gao L (2014) A level-set-based topology and shape optimization method for continuum structure under geometric constraints. Struct Multidiscip Optim 50(2):253–273
Nguyen VP, Rabczuk T, Bordas S, Duflot M (2008) Meshless methods: a review and computer implementation aspects. Math Comput Simul 79(3):763–813
Norato J, Bell B, Tortorelli D (2015) A geometry projection method for continuum-based topology optimization with discrete elements. Comput Methods Appl Mech Eng 293:306–327
Norato J, Haber R, Tortorelli D, Bendsøe MP (2004) A geometry projection method for shape optimization. Int J Numer Meth Eng 60(14):2289–2312
Norato JA (2015) A geometry projection method for the optimal distribution of short fiber reinforcements. In: ASME 2015 international design engineering technical conferences and computers and information in engineering conference, American Society of Mechanical Engineers, pp V02BT03A010–V02BT03A010
Norato JA (2018) Topology optimization with supershapes. Struct Multidiscip Optim 58(2):415–434
Overvelde JT (2012) The moving node approach in topology optimization. Master’s thesis, TU Delft, Delft University of Technology
Qian Z, Ananthasuresh G (2004) Optimal embedding of rigid objects in the topology design of structures. Mech Based Des Struct Mach 32(2):165–193
Saxena A (2011) Are circular shaped masks adequate in adaptive mask overlay topology synthesis method? J Mech Des 133(1):011001
Seo YD, Kim HJ, Youn SK (2010) Isogeometric topology optimization using trimmed spline surfaces. Comput Methods Appl Mech Eng 199(49–52):3270–3296
Sigmund O (1994) Design of materials structures using topology optimization. Ph.D. thesis, Department of Solid Mechanics, Technical University of Denmark
Smola AJ, Schölkopf B (2004) A tutorial on support vector regression. Stat Comput 14(3):199–222
Sun J, Tian Q, Hu H (2018) Topology optimization of a three-dimensional flexible multibody system via moving morphable components. J Comput Nonlinear Dyn 13(2):021010
Svanberg K (1987) The method of moving asymptotes—a new method for structural optimization. Int J Numer Meth Eng 24(2):359–373
Svanberg K (2002) A class of globally convergent optimization methods based on conservative convex separable approximations. SIAM J Optim 12(2):555–573
Svanberg K (2004) Some modelling aspects for the matlab implementation of mma. KTH Royal Institute of Technology, Stockholm
Takalloozadeh M, Yoon GH (2017) Implementation of topological derivative in the moving morphable components approach. Finite Elem Anal Des 134:16–26
Van Miegroet L, Duysinx P (2007) Stress concentration minimization of 2d filets using x-fem and level set description. Struct Multidiscip Optim 33(4–5):425–438
Wang F, Jensen JS, Sigmund O (2012) High-performance slow light photonic crystal waveguides with topology optimized or circular-hole based material layouts. Photonics Nanostructures-Fundam Appl 10(4):378–388
Wang MY, Wang X, Guo D (2003) A level set method for structural topology optimization. Comput Methods Appl Mech Eng 192(1):227–246
Wang X, Long K, Hoang VN, Hu P (2018) An explicit optimization model for integrated layout design of planar multi-component systems using moving morphable bars. Comput Methods Appl Mech Eng 342:46–70
Watts S, Tortorelli DA (2017) A geometric projection method for designing three-dimensional open lattices with inverse homogenization. Int J Numer Meth Eng 112(11):1564–1588
Wei P, Wang MY, **ng X (2010) A study on x-fem in continuum structural optimization using a level set model. Comput Aided Des 42(8):708–719
**a L, **a Q, Huang X, **e YM (2018) Bi-directional evolutionary structural optimization on advanced structures and materials: a comprehensive review. Arch Comput Methods Eng 25(2):437–478
**a L, Zhu J, Zhang W (2012) Sensitivity analysis with the modified heaviside function for the optimal layout design of multi-component systems. Comput Methods Appl Mech Eng 241:142–154
**e Y, Steven GP (1993) A simple evolutionary procedure for structural optimization. Comput Struct 49(5):885–896
Xue R, Liu C, Zhang W, Zhu Y, Tang S, Du Z, Guo X (2019) Explicit structural topology optimization under finite deformation via moving morphable void (mmv) approach. Comput Methods Appl Mech Eng 344:798–818
Zhang S, Gain AL, Norato JA (2017) Stress-based topology optimization with discrete geometric components. Comput Methods Appl Mech Eng 325:1–21
Zhang S, Gain AL, Norato JA (2018) A geometry projection method for the topology optimization of curved plate structures with placement bounds. Int J Numer Meth Eng 114(2):128–146
Zhang S, Norato JA (2017) Optimal design of panel reinforcements with ribs made of plates. J Mech Des 139(8):081403
Zhang S, Norato JA (2018) Finding better local optima in topology optimization via tunneling. In: ASME 2018 international design engineering technical conferences and computers and information in engineering conference, American Society of Mechanical Engineers, pp V02BT03A014–V02BT03A014
Zhang S, Norato JA, Gain AL, Lyu N (2016) A geometry projection method for the topology optimization of plate structures. Struct Multidiscip Optim 54(5):1173–1190
Zhang W, Chen J, Zhu X, Zhou J, Xue D, Lei X, Guo X (2017) Explicit three dimensional topology optimization via moving morphable void (mmv) approach. Comput Methods Appl Mech Eng 322:590–614
Zhang W, Li D, Yuan J, Song J, Guo X (2017) A new three-dimensional topology optimization method based on moving morphable components (mmcs). Comput Mech 59(4):647–665
Zhang W, Li D, Zhang J, Guo X (2016) Minimum length scale control in structural topology optimization based on the moving morphable components (mmc) approach. Comput Methods Appl Mech Eng 311:327–355
Zhang W, Li D, Zhou J, Du Z, Li B, Guo X (2018) A moving morphable void (mmv)-based explicit approach for topology optimization considering stress constraints. Comput Methods Appl Mech Eng 334:381–413
Zhang W, Liu Y, Du Z, Zhu Y, Guo X (2018) A moving morphable component based topology optimization approach for rib-stiffened structures considering buckling constraints. J Mech Des 140(11):111404
Zhang W, Song J, Zhou J, Du Z, Zhu Y, Sun Z, Guo X (2018) Topology optimization with multiple materials via moving morphable component (mmc) method. Int J Numer Meth Eng 113(11):1653–1675
Zhang W, **a L, Zhu J, Zhang Q (2011) Some recent advances in the integrated layout design of multicomponent systems. J Mech Des 133(10):104503
Zhang W, Yang W, Zhou J, Li D, Guo X (2017) Structural topology optimization through explicit boundary evolution. J Appl Mech 84(1):011011
Zhang W, Yuan J, Zhang J, Guo X (2016) A new topology optimization approach based on moving morphable components (mmc) and the ersatz material model. Struct Multidiscip Optim 53(6):1243–1260
Zhang W, Zhang J, Guo X (2016) Lagrangian description based topology optimization—a revival of shape optimization. J Appl Mech 83(4):041010
Zhang W, Zhong W, Guo X (2015) Explicit layout control in optimal design of structural systems with multiple embedding components. Comput Methods Appl Mech Eng 290:290–313
Zhang W, Zhou J, Zhu Y, Guo X (2017) Structural complexity control in topology optimization via moving morphable component (mmc) approach. Struct Multidiscip Optim 56(3):535–552
Zhang W, Zhou Y, Zhu J (2017) A comprehensive study of feature definitions with solids and voids for topology optimization. Comput Methods Appl Mech Eng 325:289–313
Zhou M, Rozvany G (1991) The coc algorithm, part ii: topological, geometrical and generalized shape optimization. Comput Methods Appl Mech Eng 89(1–3):309–336
Zhou M, Wang MY (2013) Engineering feature design for level set based structural optimization. Comput Aided Des 45(12):1524–1537
Zhou Y, Zhang W, Zhu J, Xu Z (2016) Feature-driven topology optimization method with signed distance function. Comput Methods Appl Mech Eng 310:1–32
Zhu B, Chen Q, Wang R, Zhang X (2018) Structural topology optimization using a moving morphable component-based method considering geometrical nonlinearity. J Mech Des 140(8):081403
Zhu J, Zhang W, Beckers P, Chen Y, Guo Z (2008) Simultaneous design of components layout and supporting structures using coupled shape and topology optimization technique. Struct Multidiscip Optim 36(1):29–41
Zhu JH, Zhang WH, **a L (2016) Topology optimization in aircraft and aerospace structures design. Arch Comput Methods Eng 23(4):595–622
Acknowledgements
This work has been partially funded by the Association Nationale de la Recherche et de la Technologie (ANRT) through Grant No. CIFRE-2016/0539.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: Characteristic Function and Local Volume Fraction Sensitivity Distribution
In this subsection we present the distribution of both characteristic function and local volume fraction sensitivity to the design variables in the example introduced in Sect. 2.6. The effect of both the sampling window size and the number of Gauss point is analyzed to compute \(\delta\) from the same W. An important observation is that by increasing \(N_{GP}\) one increases the ability of GGP to adequately capture the narrow distribution of characteristic function sensitivity.

Cantilever beam parametric study using the AMMC approach. Effect of the sampling window size R and of the number of Gauss points \(N_{GP}\) on the structural compliance and the volume fraction. In each graph we reported in green the true theoretical values based on the analytic beam model. (Color figure online)

Cantilever beam parametric study using AGP method. Effect of the sampling window size R and of the number of Gauss points \(N_{GP}\) on the structural compliance and the volume fraction. In each graph we reported in green the true theoretical values based on the analytic beam model. (Color figure online)

Cantilever beam parametric study using the AMNA method. Effect of the sampling window size R and of the number of Gauss points \(N_{GP}\) on the structural compliance and the volume fraction. In each graph we reported in green the true theoretical values based on the analytic beam model. (Color figure online)

Initial configuration for the short cantilever topology optimization problem. Components are colored according to the value of m. Blue triangles represents clamped degrees of freedoms. The red arrow represents the applied load. 18 round ended bars are considered for the optimization, i.e. \(6\times 18=108\) design variables for both AGP and AMNA and \(5\times 18=90\) design variables for AMMC. (Color figure online)
Appendix 2: Parametric Study Results on the Cantilever Beam Case
In this section the full plot results from the parametric study on the cantilever beam presented in Sect. 3.1 are provided.

Short Cantilever Beam Topology optimization using the AMMC method for variable number of Gauss points \(N_{GP}\)

Short Cantilever Beam Topology optimization using the AGP method for variable number of Gauss points \(N_{GP}\)

Short Cantilever Beam Topology optimization using the AMNA method for variable number of Gauss points \(N_{GP}\)
1.1 MMA Set-Up
In this subsection we provide details of implementations considered for the method of moving asymptotes (MMA, [44]). This approach makes local convex approximations at each iterations of both constraints and objective function. The convexity is adjusted by changing asymptotes’ positions during the optimization history. A move limit can also be chosen in order to control the optimization step and avoid divergence. A correct scaling of both design variables and compliance is recommended to avoid numerical issues. Here we propose to re-scale variables and gradients according to:
where \(l_j\) and \(u_j\) are the jth—component respectively of the lower bound \(\{l\}\) and of upper bound vector \(\{u\}\). In order to avoid further MMA numerical issues one can either normalize the compliance dividing C and \(\left\{ {\frac{dC}{d{\hat{x}}}}\right\}\) by a constant \(C_0\) greater than 1 that ensures the compliance and its gradient are small enough. However this way of normalizing introduces the issue of a good choice of \(C_0\), depending on the particular problem studied. To avoid this problem, here we considered the following normalization:
Note that since \(C>0\), \(\log {\left( 1+C\right) }\) is also greater than 0. This ensures the gradients to be smaller for higher values of C (that is the case of ill connected configurations). In order to avoid MMA divergence due to uncontrolled optimization step length, here we propose a strategy that is similar to the one taken by the globally convergent version of MMA (GCMMA) [45]. In the mmasub.m Matlab function called during the optimization loop we modified the updating of lowmin, lowmax, uppmin and uppmax formula, reducing the value of the coefficients that multiplies each variable range. Accordingly this ensures the control of the optimization step through the overestimation of the problem convexity. In this way MMA behaves more conservatively at each iteration and is less prone to oscillate or to skip local optima.Footnote 7
Rights and permissions
About this article

Cite this article
Coniglio, S., Morlier, J., Gogu, C. et al. Generalized Geometry Projection: A Unified Approach for Geometric Feature Based Topology Optimization. Arch Computat Methods Eng 27, 1573–1610 (2020). https://doi.org/10.1007/s11831-019-09362-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11831-019-09362-8