
Abstract
The elastic state at contact wheel–workpiece interface is a critical issue during robotic belt grinding process that significantly influences the finishing profile accuracy. Establishing a reasonable undeformed chip-thickness (UCT) model that suits to this operation is considered a feasible approach to clarify the cutting mechanisms. In the present paper, an elastic state–driven robotic belt grinding chip-thickness model is established to predict the workpiece surface roughness. In this new model, the combined modulus of elasticity of the contact wheel is calculated according to the formula of Young’s modulus, and the exponent with respect to the effects of linear and nonlinear deflection is further determined based on the energy balance hypothesis. Experiments are conducted to verify the reasonability of the improved chip-thickness model from the perspective of surface roughness, and the findings are likely to clarify the differences in material removal mechanism between wheel grinding and robotic belt grinding essentially.







Similar content being viewed by others

Abbreviations
- a e :
-
Depth of cut (μm)
- b s :
-
Width of grinding contact wheel (mm)
- C :
-
Number of active grits per unit area (mm−2)
- d eq :
-
Equivalent diameter of the contact wheel (mm)
- d g :
-
Equivalent spherical diameter of abrasives (mm)
- d L :
-
Shape variable of the contact wheel under action of normal belt grinding force Fn
- d L1 :
-
Shape variable of the aluminum alloy core under action of normal belt grinding force Fn
- d L2 :
-
Shape variable of the rubber under action of normal belt grinding force Fn
- e s :
-
Specific belt grinding energy (J/mm3)
- E 1 :
-
Modulus of elasticity of the contact wheel (GPa)
- E 2 :
-
Modulus of elasticity of the workpiece (GPa)
- E 11 :
-
Modulus of elasticity of aluminum alloy (GPa)
- E 12 :
-
Modulus of elasticity of rubber (GPa)
- f :
-
Fraction of abrasives that actively cut in belt grinding
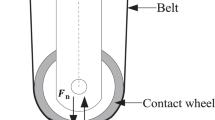
- F n :
-
Normal belt grinding force (N)
- F t :
-
Tangential belt grinding force (N)
- h m :
-
Maximum chip thickness by the existing model (μm)
- h ′ m :
-
Maximum chip thickness by the improved model (μm)
- l c :
-
Contact length between the contact wheel and workpiece (mm)
- n :
-
Exponent
- r :
-
Ratio of mean chip width to thickness
- r 1 :
-
Radius of aluminum alloy core (mm)
- r 2 :
-
Radius of contact wheel (mm)
- Ra :
-
Center-line average value of surface roughness (μm)
- Ra′ :
-
Surface roughness estimated with the existing chip-thickness model (μm)
- Ra″ :
-
Surface roughness estimated with the improved chip-thickness model (μm)
- S :
-
Area of deformation of the aluminum alloy surface (mm2)
- v :
-
Volume fraction of abrasives in belt grinding
- v s :
-
Contact wheel speed (m/s)
- v w :
-
Workpiece (robot feed) speed (mm/s)
- V c :
-
Volume of each chip (mm3)
- △1 :
-
Roughness deviation of the existing model
- △2 :
-
Roughness deviation of the improved model
References
Zhu D, Luo S, Yang L, Chen W, Yan S, Ding H (2015) On energetic assessment of cutting mechanisms in robot-assisted belt grinding of titanium alloys. Tribol Int 90:55–59
Li WL, Zhou LP, Yan SJ (2015) A case study of blade inspection based on optical scanning method. Int J Prod Res 53(7):2165–2178
Li WL, **e H, Zhang G, Yan SJ, Yin ZP (2016) Hand-eye calibration in visually-guided robot grinding. IEEE Trans Cybern 46(11):2634–2642
Xu X, Zhu D, Zhang H, Yan S, Ding H (2017) TCP-based calibration in robot-assisted belt grinding of aero-engine blades using scanner measurements. Int J Adv Manuf Technol 90(1–4):635–647
Xu X, Zhu D, Wang J, Yan S, Ding H (2018) Calibration and accuracy analysis of robotic belt grinding system using the ruby probe and criteria sphere. Robot Cim-Int Manuf 51:189–201
Wang W, Yun C (2011) A path planning method for robotic belt surface grinding. Chinese J Aeronaut 24(4):520–526
Ng WX, Chan HK, Teo WK, Chen IM (2017) Capturing the tacit knowledge of the skilled operator to program tool paths and tool orientations for robot belt grinding. Int J Adv Manuf Technol 91(5–8):1599–1618
Zhang T, Su J (2018) Collision-free planning algorithm of motion path for the robot belt grinding system. Int J Adv Robot Syst 7:1–13
Chen F, Zhao H (2018) Design of eddy current dampers for vibration suppression in robotic milling. Adv Mech Eng 10:11):1–11)15
Zhu D, Xu X, Yang Z, Zhuang K, Yan S, Ding H (2018) Analysis and assessment of robotic belt grinding mechanisms by force modeling and force control experiments. Tribol Int 120:93–98
Chen F, Zhao H, Li D, Chen L, Tan C, Ding H (2019) Contact force control and vibration suppression in robotic polishing with a smart end effector. Robot Cim-Int Manuf 57:391–403
Xu X, Zhu D, Zhang H, Yan S, Ding H (2019) Application of novel force control strategies to enhance robotic abrasive belt grinding quality of aero-engine blades. Chin J Aeronaut. https://doi.org/10.1016/j.cja.2019.01.023
Pandiyan V, Tjahjowidodo T (2017) In-process endpoint detection of weld seam removal in robotic abrasive belt grinding process. Int J Adv Manuf Technol 93(5–8):1699–1714
Chen J, Chen H, Xu J, Wang J, Zhang X, Chen X (2018) Acoustic signal-based tool condition monitoring in belt grinding of nickel-based superalloys using RF classifier and MLR algorithm. Int J Adv Manuf Technol 98(1–4):859–972
Zhang X, Chen H, Xu J, Song X, Wang J, Chen X (2018) A novel sound-based belt condition monitoring method for robotic grinding using optimally pruned extreme learning machine. J Mater Process Tech 260:9–19
Pandiyan V, Murugan P, Tjahjowidodo T, Caesarendra W, Manyar O (2019) In-process virtual verification of weld seam removal in robotic abrasive belt grinding process using deep learning. Robot Cim-Int Manuf 57:477–487
Song Y, Liang W, Yang Y (2012) A method for grinding removal control of a robot belt grinding system. J Intell Manuf 23(5):1903–1913
Wu S, Kazerounian K, Gan Z, Sun Y (2014) A material removal model for robotic belt grinding process. Mach Sci Technol 18:15–30
Wang YJ, Huang Y, Chen YX, Yang ZS (2016) Model of an abrasive belt grinding surface removal contour and its application. Int J Adv Manuf Technol 82(9):2113–2122
Pandiyan V, Murugan P, Tjahjowidodo T, Caesarendra W, Manyar OM, Then DJH (2019) In-process virtual verification of weld seam removal in robotic abrasive belt grinding process using deep learning. Robot Cim-Int Manuf 57:477–487
Qiu J, Sun K, Wang T, Gao H (2019) Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE T Fuzzy Syst:1. https://doi.org/10.1109/TFUZZ.2019.2895560
Sun K, Mou S, Qiu J, Wang T, Gao H (2018) Adaptive fuzzy control for non-triangular structural stochastic switched nonlinear systems with full state constraints. IEEE T Fuzzy Syst 27:1587–1601. https://doi.org/10.1109/TFUZZ.2018.2883374
Agarwal S, Rao PV (2005) A probabilistic approach to predict surface roughness in ceramic grinding. Int J Mach Tool Manu 45:609–616
Agarwal S, Rao PV (2010) Modeling and prediction of surface roughness in ceramic grinding. Int J Mach Tool Manu 50(12):1065–1076
Agarwal S, Rao PV (2012) Predictive modeling of undeformed chip thickness in ceramic grinding. Int J Mach Tool Manu 56:59–68
Agarwal S, Rao PV (2013) Predictive modeling of force and power based on a new analytical undeformed chip thickness model in ceramic grinding. Int J Mach Tool Manu 65(2):68–78
Dai C, Ding W, Zhang L, Xu J, Su H (2015) Understanding the effects of grinding speed and undeformed chip thickness on the chip formation in high-speed grinding. Int J Adv Manuf Technol 81:995–1005
Dai C, Ding W, Xu J, Xu X, Fu D (2017) Effects of undeformed chip thickness on grinding temperature and burn-out in high-efficiency deep grinding of Inconel718 superalloys. Int J Adv Manuf Technol 89:1841–1852
Ding W, Dai C, Yu T, Xu J, Fu Y (2017) Grinding performance of textured monolayer CBN wheels: undeformed chip thickness nonuniformity modeling and ground surface topography prediction. Int J Mach Tool Manu 122:66–80
Yang M, Li C, Zhang Y, Jia D, Zhang X, Hou Y, Li R, Wang J (2017) Maximum undeformed equivalent chip thickness for ductile-brittle transition of zirconia ceramics under different lubrication conditions. Int J Mach Tool Manu 122:55–65
Wang W, Liu F, Liu Z, Yun C (2017) Prediction of depth of cut for robotic belt grinding. Int J Adv Manuf Technol 91:699–708
Yan S, Xu X, Yang Z, Zhu D, Ding H (2019) An improved robotic abrasive belt grinding force model considering the effects of cut-in and cut-off. J Manuf Process 37:496–508
Gopal AV, Rao PV (2004) A new chip-thickness model for performance assessment of silicon carbide grinding. Int J Adv Manuf Technol 24:816–820
Malkin S (1989) Grinding technology, theory and applications of machining with abrasives. Horwood Limited, Ellis
Mayer JE, Fang GP, Kegg RL (1994) Effect of grit depth of cut on strength of ground ceramics. CIRP Ann - Manuf Techn 43(1):309–312
Xu HHK, Jahanmir S, Ives LK (1997) Effect of grinding on strength of tetragonal zirconia and zirconia-toughened alumina. Mach Sci Technol 1(1):49–66
Marinescu ID, Rowe WB, Dimitrov B, Inasaki I (2004) Tribology of abrasive machining processes. William Andrew, Inc, Norwich
Hwang TW, Malkin S (1999) Upper bound analysis for specific energy in grinding of ceramics. Wear 231:161–171
Hecker RL, Liang S (2003) Predictive modeling of surface roughness in grinding. Int J Mach Tool Manu 43(8):755–761
Funding
The authors received financial support from the National Nature Science Foundation of China (Nos. 51675394, 51975443), the National Key Research and Development Program of China (No. 2017YFB1303403), the State Key Laboratory of Digital Manufacturing Equipment and Technology (No. DMETKF2018018), and the “111” Project (No. B17034).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Qu, C., Lv, Y., Yang, Z. et al. An improved chip-thickness model for surface roughness prediction in robotic belt grinding considering the elastic state at contact wheel-workpiece interface. Int J Adv Manuf Technol 104, 3209–3217 (2019). https://doi.org/10.1007/s00170-019-04332-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-019-04332-7