
Abstract
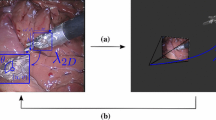
Intraoperative assistance systems aim to improve the quality of the surgery and enhance the surgeon’s capabilities. Preferable would be a system which provides support depending on the surgery context and surgical skills accomplished. Therefore, the automated analysis and recognition of surgical skills during an intervention is necessary. In this paper a robust tracking of instruments in minimally invasive surgery based on endoscopic image sequences is presented. The instruments were not modified and the tracking was tested on sequences acquired during a real intervention. The generated trajectory of the instruments provides information which can be further used for surgical gesture interpretation.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Taylor, R., Stoianovici, D.: Medical Robotics in Computer-Integrated Surgery. IEEE Transactions on Robotics and Automation (2003)
Satava, R., Cuschieri, A., Hamdorf, J.: Metrics for objective assessment. Journal of Surgical Endoscopy (2003)
Lin, H., Shafran, I., Murphy, T., Okamura, A., Yuh, D., Hager, G.: Automatic Detection and Segmentation of Robot-Assisted Surgical Motions. In: Duncan, J.S., Gerig, G. (eds.) MICCAI 2005. LNCS, vol. 3749, pp. 802–810. Springer, Heidelberg (2005)
Rosen, J., Solazzo, M., Hannaford, B., Sinanan, M.: Objective Evaluation of Laparoscopic Skills Based on Haptic Information and Tool/Tissue Interactions. Journal of Computer Aided Surgery (2002)
Lo, B., Darzi, A., Yang, G.: Episode Classification for the Analysis of Tissue / Instrument Interaction with Multiple Visual Cues. In: Ellis, R.E., Peters, T.M. (eds.) MICCAI 2003. LNCS, vol. 2878, pp. 230–237. Springer, Heidelberg (2003)
Mayer, H., Nagy, I., Knoll, A.: Skill Transfer and Learning by Demonstration in a Realistic Scenario of Laparoscopic Surgery. In: International Conference on Humanoid Robots (2003)
Pardowitz, M., Zöllner, R., Dillmann, R.: Incremental Acquisition of Task Knowledge Applying Heuristic Relevance Estimation. In: International Conference on Robotics and Automation (2006)
Zöllner, R., Rogalla, O., Dillmann, R., Zöllner, M.: Understanding Users Intention: Programming Fine Manipulation Tasks by Demonstration. In: International Conference on Intelligent Robots and Systems (2002)
Vogt, F., Krüger, S., Niemann, H., Schick, C.: A System for Real-Time Endoscopic Image Enhancement. In: Ellis, R.E., Peters, T.M. (eds.) MICCAI 2003. LNCS, vol. 2879, pp. 356–363. Springer, Heidelberg (2003)
Guthart, G.S., Salisbury, J.K.: The intuitive telesurgery system: Overview and application. In: International Conference on Robotics and Automation (2000)
Phung, S., Bouzerdoum, A., Chai, D.: Skin Segmentation Using Color Pixel Classification: Analysis and Comparison. IEEE Transactions on Pattern Analysis and Machine Intelligence (2005)
Isard, M., Blake, A.: Condensation - conditional density propagation for visual tracking. International Journal of Computer Vision (1998)
Azad, P., Ude, A., Dillmann, R., Cheng, G.: A Full Body Human Motion Capture System using Particle Filtering and on-the-fly Edge Detection. In: International Conference on Humanoid Robots (2004)
Azad, P.: Integrating Vision Toolkit (IVT), http://ivt.sourceforge.net
Deutscher, J., Blake, A., Reid, I.: Articulated body motion capture by annealed particle filtering. In: International Conference on Computer Vision and Pattern Recognition (2000)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2006 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Speidel, S., Delles, M., Gutt, C., Dillmann, R. (2006). Tracking of Instruments in Minimally Invasive Surgery for Surgical Skill Analysis. In: Yang, GZ., Jiang, T., Shen, D., Gu, L., Yang, J. (eds) Medical Imaging and Augmented Reality. MIAR 2006. Lecture Notes in Computer Science, vol 4091. Springer, Berlin, Heidelberg. https://doi.org/10.1007/11812715_19
Download citation
DOI: https://doi.org/10.1007/11812715_19
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-37220-2
Online ISBN: 978-3-540-37221-9
eBook Packages: Computer ScienceComputer Science (R0)