Collection
MULTIBODY2023
The main purpose of this special/thematic issue is to present a collection of outstanding full papers especially identified and recommended from the 250 contributions presented at the 11th ECCOMAS Thematic Conference on Multibody Dynamics, held on July 24–28, 2023 at the Instituto Superior Técnico, Lisbon, Portugal. The selected contributions are the result of a strict evaluation and rigorous review process, which were identified as spearheads of their corresponding disciplines within the topics covered by the conference and coinciding with general multibody objectives. Thus, the authors are invited to extend their contribution made in the conference and to complete their expositions such as to make of them reference publications of archival nature, after which a re-review process was conducted within the high standards of this journal.
The ECCOMAS Thematic Conference on Multibody Dynamics is a meeting point for the international multibody community that provides an opportunity to exchange cutting-edge knowledge and ideas on the theory and applications of multibody systems. Starting in Lisbon in 2003, this series of Thematic Conferences has been held biennially, with subsequent editions taking place in Madrid (2005), Milan (2007), Warsaw (2009), Brussels (2011), Zagreb (2013), Barcelona (2015), Prague (2017), Duisburg (2019), and Budapest (2021). The past edition, Lisbon 2023, gathered more than 270 participants from all Continents, representing most of the active research groups in the World.
The topics of the Conference included Aerospace, Medical, and Industrial Applications; Biomechanics; Contact, Impact, and Constraints; Efficient Simulation and Real-Time Applications; Flexible Multibody Dynamics; Formulations and Numerical Methods; Mechatronics, Robotics, and Control; Multibody Kinematics; Optimization and Sensitivity Analysis; Multiphysics and Multiscale Problems & Education, Validation, and Software Development; and Dynamics of Vehicles.
Editors
-
Jorge Ambrósio
Universidade Técnica de Lisboa, Department of Mechanical Engineering (DEM), Portugal
-
Paulo Flores
University of Minho, Departamento de Engenharia Mecânica (DEM)Braga, Portugal
-
Carlos Quental
Universidade Técnica de Lisboa, Department of Mechanical Engineering (DEM), Portugal
-
Hugo Magalhães
Instituto Superior Técnico, Universidade de Lisboa, Portugal
Articles (12 in this collection)
-
-

-
Flexible multibody approaches for simulating the deflection and contact mechanics of toothbrush bristles: modelling and testing
Authors (first, second and last of 5)

-
Numerical simulation of the post-derailment behaviour of a railway vehicle and its interaction with the infrastructure
Authors (first, second and last of 6)

-
Review and comparison of empirical friction coefficient formulation for multibody dynamics of lubricated slotted joints
Authors (first, second and last of 6)

-

-
Beam modeling in a floating frame of reference for torsion dynamics of helicopter rotor blades
Authors

-

-
Comparison between quasi-static and multibody dynamic simulations for wheel-rail contact analysis
Authors (first, second and last of 6)

-

-
A new contact and road model for multi-body dynamic simulation of wheeled vehicles on soft-soil terrain
Authors (first, second and last of 4)

-
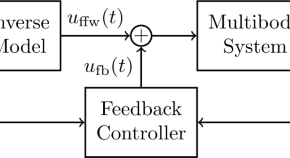
Experimental validation for the combination of funnel control with a feedforward control strategy
Authors (first, second and last of 5)