
Abstract
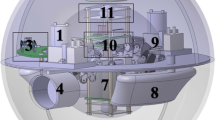
Spherical Amphibian Vehicle (SAV) is a spherical robot that is capable of operating in two different environments which are terrestrial and underwater. SAV has a wide range of applications in scientific research and military activities such as ocean exploration and search and rescue missions. However, motion control of a spherical robot is a very challenging task because of the nonlinearity of the robot system, time-variance, uncertainty external disturbances and difficulty in hydrodynamic modelling. This project is focused on building a SAV that is cost-efficient and able to function on land and underwater. The designed robot is a 2 degree of freedom (DoF) movement that can move forward/reverse and left/right direction. It uses one DC motor and one servo motor to actuate the forward/reverse motion and sideways (left/right) motion, respectively. Arduino UNO is selected to be used as a microcontroller due to its effectiveness and low cost. The spherical amphibian robot is designed with Arduino bluecontrol interface.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Jeril VR, Lashmi K, Shanmughasundaram R (2018) Design of a spherical robot with improved stability for planetary exploration. J Adv Res Dyn Control Syst 10 (03-Special Issue)
Zhe W, Guo S, Shi L, Pan S, He Y (2014) The application of PID control in motion control of the spherical amphibious robot. In: Proceedings of the 2014 IEEE international conference on mechatronics and automation, pp 1901–1905
Guo J, Wu G, Guo S (2015) Fuzzy PID algorithm-based motion control for the spherical amphibious robot. In: Proceedings of the 2015 IEEE international conference on mechatronics and automation, pp 1583–1588
Chen W-H, Chen C-P, Tsai J-S, Yang J, Lin P-C (2013) Design and implementation of a ball-driven omnidirectional spherical robot. Mech Mach Theory 68:35–48
Vrunda J, Ravi B, Rohit H (2007) Design, modeling and controllability of a spherical mobile robot. NaCoMM. IISc, Bangalore, India, pp 135–140
Bhattacharya S, Agrawal SK (2000) Spherical rolling robot: a design and motion planning studies. IEEE Trans Robot Autom 16(6):835–839
Li Y, Yang M, Sun H, Liu Z, Zhang Yi (2018) A novel amphibious spherical robot equipped with flywheel, pendulum, and propeller. J Intell Robot Syst 89:485–501
Li M, Guo S, Hirata H et al (2015) Design and performance evaluation of an amphibious spherical robot. Robot Auton Syst 64:21–34
Abhra Roy CA, Vibhute GS, Soh SH, Wood KL (2017) Implementing caterpillar inspired roll control of a spherical robot. In: International conference on robotics and automation (ICRA), pp 4167–4174
He Y, Shi L, Guo S et al (2015) Preliminary mechanical analysis of an improved amphibious spherical father robot. Microsyst Technol 99(6):1–16
Lin B et al (2015) Kinematic analysis on land of an amphibious spherical robot system. In: IEEE international conference on mechatronics and automation. IEEE, pp 280–296
Acknowledgements
The authors wish to acknowledge the Ministry of Education, Malaysia and Universiti Teknikal Malaysia Melaka. Special appreciation and gratitude to especially for Underwater Technology Research Group (UTeRG), Centre of Research and Innovation Management (CRIM), Center for Robotics and Industrial Automation (CeRIA) and Faculty of Electrical Engineering from UTeM for supporting this research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bahar, M.B. et al. (2022). Design and Development of Spherical Amphibian Vehicle (SAV). In: Isa, K., et al. Proceedings of the 12th National Technical Seminar on Unmanned System Technology 2020. Lecture Notes in Electrical Engineering, vol 770. Springer, Singapore. https://doi.org/10.1007/978-981-16-2406-3_1
Download citation
DOI: https://doi.org/10.1007/978-981-16-2406-3_1
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-2405-6
Online ISBN: 978-981-16-2406-3
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)