
Abstract
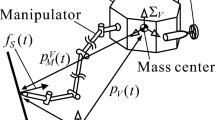
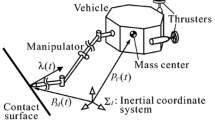
Neural networks (NN) are applied to the tracking control of a three-link manipulator attached to an autonomous underwater vehicle (AUV). Lyapunov design is employed to obtain the NN based robust controller. The interaction between the AUV and the manipulator is considered. Nonlinearity in the plant is compensated by NN based identification. To illustrate the validity of the proposed controller, numerical simulation is performed and the comparison between the NN based controller and a conventional proportional-derivative (PD) controller is conducted.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Mohan, S., Kim, J.: Coordinated motion control in task space of anautonomous underwater vehicle-manipulator system. Ocean Eng. 104, 155–167 (2015)
Xu, B.R., Pandian, S., Sakagami, N., Petry, F.: Neuro-fuzzy control of underwater vehicle-manipulator systems. J. Franklin. Inst. 349, 1125–1138 (2012)
Han, J., Chung, W.K., Sakagami, N., Petry, F.: Active use of restoring moments for motion control of an underwater vehicle-manipulator system. IEEE J. Ocean. Eng. 39(1), 100–109 (2014)
Korkmaz, O., Kemal Ider, S., Kemal Ozgoren, M.: Control of an underactuated underwater vehicle manipulator system in the presence of parametric uncertainty and disturbance. In: 2013 American Control Conference, pp. 578–584. IEEE Press, New York (2013)
Antonelli, G., Cataldi, E.: Recursive adaptive control for an underwater vehicle carrying a manipulator. In: 22nd Mediterranean Conference on Control and Automation, pp. 847–852. IEEE Press, New York (2014)
Antonelli, G., Cataldi, E.: Virtual decomposition control for an underwater vehicle carrying a n-DoF manipulator. In: OCEANS 2015, pp. 1–9. IEEE Press, New York (2015)
Barbalata, C., Dunnigan, M.W., Ptillot, Y.: Dynamic coupling and control issues for a lightweight underwater vehicle manipulator system. In: OCEANS 2014, pp. 1–6. IEEE Press, New York (2014)
Ji, D., Kim, D., Kang, J., Kim, J., Nguyen, N., Choi, H., Byun, S.: Redundancy analysis and motion control using ZMP equation for underwater vehicle-manipulator systems. In: OCEANS 2016, pp. 1–6. IEEE Press, New York (2016)
Woolfrey, J., Liu, D., Carmichael, M.: Kinematic control of an autonomous underwater vehicle - manipulator system (AUVMS) using autoregressive prediction of vehicle motion and model predictive control. In: 2016 IEEE International Conference on Robotics and Automation, pp. 4591–4596. IEEE Press, New York (2016)
Antonelli, G.: Underwater Robots. Springer, Heidelberg (2014)
Kwan, C., Lewis, F.L., Dawson, D.M.: Robust neural network control of rigid-link electrically-driven robots. IEEE Trans. Neural Networks. 9(4), 581–588 (1998)
Acknowledgments
This work was partially supported by the Special Item supported by the Fujian Provincial Department of Ocean and Fisheries (No. MHGX-16), the Special Item for University in Fujian Province supported by the Education Department (No. JK15003), and the Special Item supported by Fuzhou University (No. 2014-XQ-16).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Luo, W., Cong, H. (2017). Robust NN Control of the Manipulator in the Underwater Vehicle-Manipulator System. In: Cong, F., Leung, A., Wei, Q. (eds) Advances in Neural Networks - ISNN 2017. ISNN 2017. Lecture Notes in Computer Science(), vol 10262. Springer, Cham. https://doi.org/10.1007/978-3-319-59081-3_10
Download citation
DOI: https://doi.org/10.1007/978-3-319-59081-3_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-59080-6
Online ISBN: 978-3-319-59081-3
eBook Packages: Computer ScienceComputer Science (R0)