
Abstract
“In the realm of classic gaming, Mario has held a special place in the hearts of players for generations. This study, titled ‘Enhancing Mario Gaming using Optimized Reinforcement Learning’, ventures into the uncharted territory of machine learning to elevate the Mario gaming experience to new heights. Our research employs state-of-the-art techniques, including the Proximal Policy Optimization (PPO) algorithm and Convolutional Neural Networks (CNN), to infuse intelligence into the Mario gameplay. By optimizing reinforcement learning, we aim to create an immersive and engaging experience for players. In addition to the technical aspects, we delve into the concept of game appeal, a pivotal component in capturing player engagement. Our innovative approach blends the prowess of PPO, CNN, and reinforcement learning to unlock unique insights and methodologies for enhancing Mario games. This comprehensive analysis provides actionable guidance for selecting the most suitable techniques for distinct facets of Mario games. The culmination is an enriched, captivating, and optimized gaming experience that befits the title, ‘Enhancing Mario Gaming using Optimized Reinforcement Learning’.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
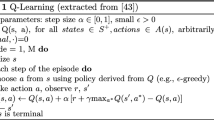
Liao, Y., Yi, K., Yang, Z.: CS229 Final Report Reinforcement Learning to Play Mario. 2012 Stanford University. https://cs229.stanford.edu/proj2012/LiaoYiYang-RLtoPlayMario.pdf
Alaniz, S.: Deep reinforcement learning with model learning and Monte Carlo tree search in minecraft. ar**v preprint ar**v:1803.08456 (2018)
Azizzadenesheli, K., Yang, B., Liu, W., Brunskill, E., Lipton, Z.C., Anandkumar, A.: Sample-efficient deep RL with generative adversarial tree search. CoRR, abs/1806.05780 (2018)
Babaeizadeh, M., Finn, C., Erhan, D., Campbell, R.H., Levine, S.: Stochastic variational video prediction. In: ICLR (2017)
Babaeizadeh, M., Frosio, I., Tyree, S., Clemons, J., Kautz, J.: Reinforcement learning through asynchronous advantage actor-critic on a GPU. In: 5th International Conference on Learning Representations, ICLR 2017, Toulon, France, 24–26 April 2017, Conference Track Proceedings. OpenReview.net (2017). https://openreview.net/forum?id=r1VGvBcxl
Bellemare, M.G., Naddaf, Y., Veness, J., Bowling, M.: The arcade learning environment: an evaluation platform for general agents (extended abstract). In: Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence, IJCAI, pp. 4148–4152 (2015)
Bengio, S., Vinyals, O., Jaitly, N., Shazeer, N.: Scheduled sampling for sequence prediction with recurrent neural networks. In: Advances in Neural Information Processing Systems 28: Annual Conference on Neural Information Processing Systems 2015, 7–12 December 2015, Montreal, Quebec, Canada, pp. 1171–1179 (2015)
Buesing, L., et al.: Woulda, coulda, shoulda: counterfactually-guided policy search. In: 7th International Conference on Learning Representations, ICLR 2019, New Orleans, LA, USA, 6–9 May 2019. OpenReview.net (2019). https://openreview.net/forum?id=BJG0voC9YQ
Castro, P.S., Moitra, S., Gelada, C., Kumar, S., Bellemare, M.G.: Dopamine: a research framework for deep reinforcement learning. CoRR, abs/1812.06110 (2018). Chiappa, S., Racaniere, S., Wierstra, D., Mohamed, S.: Recurrent environment simulators. In: 5th International Conference on Learning Representations, ICLR 2017, Toulon, France, 24–26 April 2017 (2017)
Chua, K., Calandra, R., McAllister, R., Levine, S.: Deep reinforcement learning in a handful of trials using probabilistic dynamics models. In: Advances in Neural Information Processing Systems, pp. 4759–4770 (2018)
Deisenroth, M.P., Neumann, G., Peters, J.: A survey on policy search for robotics. Found. Trends Robot. 2(1–2), 1–142 (2013)
Ebert, F., Finn, C., Lee, A.X., Levine, S.: Self-supervised visual planning with temporal skip connections. In: 1st Annual Conference on Robot Learning, CoRL (2017)
Mountain View, California, USA, 13–15 November 2017, Proceedings. Proceedings of Machine Learning Research, vol. 78, pp. 344–356. PMLR (2017)
Ebert, F., Finn, C., Dasari, S., **e, A., Lee, A., Levine, S.: Visual foresight: model-based deep reinforcement learning for vision-based robotic control. ar**v preprint ar**v:1812.00568 (2018)
Ersen, M., Sariel, S.: Learning behaviors of and interactions among objects through spatio-temporal reasoning. IEEE Trans. Comput. Intell. AI Games 7(1), 75–87 (2014)
Espeholt, L., et al.: IMPALA: scalable distributed deep-rl with importance weighted actor-learner architectures. In: Proceedings of the 35th International Conference on Machine Learning, ICML, pp. 1406–1415 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Sah, S.K., Fidele, H. (2024). Enhancing Mario Gaming Using Optimized Reinforcement Learning. In: Devismes, S., Mandal, P.S., Saradhi, V.V., Prasad, B., Molla, A.R., Sharma, G. (eds) Distributed Computing and Intelligent Technology. ICDCIT 2024. Lecture Notes in Computer Science, vol 14501. Springer, Cham. https://doi.org/10.1007/978-3-031-50583-6_14
Download citation
DOI: https://doi.org/10.1007/978-3-031-50583-6_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-50582-9
Online ISBN: 978-3-031-50583-6
eBook Packages: Computer ScienceComputer Science (R0)