
Abstract
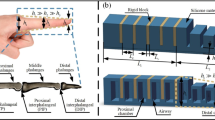
Pressure actuated soft robotic fingers are commonly used in different structures, shapes and orientations for predominantly gras** applications. But soft robot application with two pressure chambers on either side of the restraining material that facilitates curling of the soft robotic finger in two directions when the chambers are actuated alternatively is only found in an attempt to mimic fish tail for its locomotion. This project outlines how the two-chamber finger with bi-directional motion capabilities can actuate mechanisms. It is an advantage to use pressure difference actuated pneumatic tubes over conventional heavy motor actuated rigid cranks in circumstances like tethered robots, ceiling robots, etc. An attempt is made to explain how the soft robot can act as a crank or input link for planar mechanisms such as four-bar mechanism and slider-crank mechanism, through analytical and numerical approach. Simulations of the soft robot has been used to obtain the input (pressure) vs output (curling of the robotic finger) characteristics. The tip of the finger is considered as input to the forward kinematic analysis of the mechanism, i.e., four-bar and slider-crank mechanism. Similarly, inverse kinematics formulations are obtained to obtain the pressure required as input to result in desired rotation of the follower link in a four-bar mechanism and the displacement of the slider in a slider-crank mechanism. Proof of concept prototype of the bi-directional soft robotic gripper has been developed and tested.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Devi, M.A., Udupa, G., Sreedharan, P.: A novel underactuated multi-fingered soft robotic hand for prosthetic application. Robot. Auton. Syst. 100, 267–277 (2018)
Udupa, G., Sreedharan, P., Sai Dinesh, P., Kim, D.: Asymmetric bellow flexible pneumatic actuator for miniature robotic soft gripper. J. Robot. 2014 (2014)
Soft Robotics Toolkits. www.softroboticstoolkit.com
Sun, Y., Song, Y.S., Paik, J.: Characterization of silicone rubber based soft pneumatic actuators. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4446–4453 (2013)
Vidwath, S.M.G., Rohith, P., Dikshithaa, R., Nrusimha Suraj, N., Chittawadigi, R.G., Sambandham, M.: Soft robotic gripper for agricultural harvesting. In: Kumar, R., Chauhan, V.S., Talha, M., Pathak, H. (eds.) Machines, Mechanism and Robotics. LNME, pp. 1347–1353. Springer, Singapore (2022). https://doi.org/10.1007/978-981-16-0550-5_128
Katzschmann, R., de Maille, A., Dorhout, D., Rus, D.: Cyclic hydraulic actuation of soft robotic devices (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Shanmuganathan, S., Venkatesh, V.P., Pandey, D., Chittawadigi, R.G. (2022). Bi-directional Soft Robotic Finger Actuated Mechanisms. In: Khang, N.V., Hoang, N.Q., Ceccarelli, M. (eds) Advances in Asian Mechanism and Machine Science. ASIAN MMS 2021. Mechanisms and Machine Science, vol 113. Springer, Cham. https://doi.org/10.1007/978-3-030-91892-7_36
Download citation
DOI: https://doi.org/10.1007/978-3-030-91892-7_36
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-91891-0
Online ISBN: 978-3-030-91892-7
eBook Packages: EngineeringEngineering (R0)