
Abstract
Since 1996, GPS and GNSS have been used to measure position and time on large structures, notably long span bridges. Receivers act simultaneously as dynamic deformation sensors. The use of high rate GNSS receivers to generate time displacement series—typically 10 Hz or greater—provides improvements in accuracy through both processing techniques and the use of multi GNSS. Filter techniques to isolate noise effects, and especially the treatment of multipath errors is presented. The use of other sensors such as accelerometers, pseudolites, Locatalites and total stations used to augment and verify the GNSS data is explained. Data analysis gives position and frequency that may be used in conjunction with appropriate models, and correlation to other sensor data to assess structural characteristics giving engineers extensive information for the assessment of structures. Case studies of extensive bridge campaigns are presented. Future developments in the technology of both data generation and application are discussed in the context of needs for real time alarms and assessment of engineering structures.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Al-Shaery, Zhang, A., Rizos, C., (2013), An enhanced calibration method of GLONASS inter-channel bias for GNSS RTK, GPS Sol., 17, 165–173.
Ashkenazi, V., Dodson, A.H., Moore, T., Roberts, G.W. (1996) Real Time OTF GPS Monitoring of the Humber Bridge, Surveying World, 4 (4), ISSN 0927-7900, pp 26-28, May/June 1996.
Ashkenazi, V. and Roberts, G.W. (1997), Experimental monitoring of the Humber bridge using GPS, Paper 11296, Proc. Instn Civ. Engrs, Civ. Engng, 120, 177–182.
Ashkenazi, V., Bingley, R.M., Whitmore, G.M., Baker, T.F., (1993). Monitoring changes in mean-sea-level to millimetres using GPS, Geoph. Res. Lett., 24(11), 01042, 1303–1306.
Barnes, J.B., Ackroyd, N., and Cross, P.A., (1998), Stochastic Modelling for Very High Precision Real-Time Kinematic GPS in an Engineering Environment, Proceedings of FIG XXI International Conference, 21–25 July, Brighton, UK, Commission 6, 61–76.
Barnes, J., Rizos, C., Wang, J., Meng, X., Cosser, E., Dodson, A.H. and Roberts, G.W. (2003). “The Monitoring of Bridge Movements using GPS and Pseudolites.” 11th International Symposium on Deformation Measurements, International Federation Surveyors (FIG), Commission 6 - Engineering Surveys, Working Group 6.1, 25–28 May, Santorini, Greece.
Barnes, J., Rizos, C., Lee, H.K., Roberts, G.W., Meng, X., Cosser, E., and Dodson, A.H., (2004a). The Integration of GPS and Pseudolites for Bridge Monitoring. In: Sansò F. (eds) A Window on the Future of Geodesy. International Association of Geodesy Symposia, vol 128. Springer, Berlin, Heidelberg ISSN 0939-9585. ISBN 3-540-24055-1.
Barnes, J., Rizos, C., Kanli, M., Small, D., Voigt, G., Gambale, N., Lamance, J. (2004b). Structural Deformation Monitoring Using Locata. First FIG International Symposium on Engineering Surveys for Construction Works and Structural Engineering, 28 June–1 July 2004, Nottingham, UK.
Barnes, J., Rizos, C., Kanli, M.O., Pahwa, A. (2006), ‘Locata - A New Positioning Technology for Classically Difficult GNSS Environments’, in IGNSS 2006, Menay Pty Ltd, Surfers.
BBC (2019), http://news.bbc.co.uk/1/hi/england/1829053.stm accessed 07 January 2019.
Paradise, Queensland, Australia, presented at International Global Navigation Satellite Systems Society 2006, Surfers Paradise, Queensland, Australia, 17 – 21 July 2006.
Billiris, H., Paradissis, D., Veis, G., England, P., Featherstone, W., Parsons, B., Cross, P., Rands, P., Rayson, M., Sellers, P., Ashkenazi, V., Davison, M., Jackson, J., Ambrasseys, N. (1991). Geodetic determination of tectonic deformation in central Greece from 1900 to 1988, Nature, 350, 124–129.
Blewitt, G., (1989). Carrier phase ambiguity resolution for the Global Positioning System applied to geodetic baselines up to 2000 km, J. Geophys. Res, 94(B8), 10187–10203.
Bock, Y, et al., (2000). Instantaneous Geodetic Positioning at Medium Distances with the Global Positioning System. J. Geophys. Res., 105 (B12), 28, 223–28, 253.
Brownjohn, J.M.W., Bocciolone, M., Curami, A., Falco, M. and Zasso, A. (1994), Humber Bridge full-scale measurement campaigns 1990–1991, J. Wind Eng. Ind. Aerodyn., 52 185–218.
Brown, C.J., Karuna, R., Ashkenazi, V., Roberts, G., Evans, R.A. (1999) “Monitoring of Structures using GPS”, Proc. ICE. Structures and Buildings, 134(1) 97–105.
Choi, I.K., Wang, J. Han, S. Rizos, C. (2000), ‘Pseudolites: a new tool for surveyors?’, in The Institution of Surveyors Australia (ed.), 2nd Trans Tasman Survey Congress, 2nd Trans Tasman Survey Congress, Queenstown, New Zealand, pp. 141–149, presented at 2nd Trans Tasman Survey Congress, Queenstown, New Zealand, 20 - 26 August 2000.
Colford, B.R., (2010) On maintaining suspension cables on bridges. Journal of Protective Coating and Linings; Pittsburg. May 2010, pp 8, 10–11. ISSN 87551985.
Cocksedge, C., Hudson, T., Urbans, B., Baron, S. (2010) M48 Severn Bridge - main cable inspection and rehabilitation. Proc. ICE. Bridge Eng. 163(4), 181–195.
Cannon, M.E., Lachapelle, G., Lu, G. (1992), Kinematic ambiguity resolution with high-precision C/A code receiver, J. Surv. Eng. (ASCE), 119(4), 147–155.
Clarke, P.J., Davies, R.R., England, P.C., Parsons, B., Billiris, H., Paradissis, D., Veis, G., Cross, P.A., Denys, P.H., Ashkenazi, V., Bingley, R., Kahle, H.-G., Muller, M.-V., Briole, P. (1998). Crustal strain in Greece from repeated GPS measurements in the interval 1989–1997, Geoph. J. Int., 135(1), 195–214.
Celebi, M., Prescott, W., Stein, R., Hudnut, J., Behr, J., Wilson, S. (1999), GPS monitoring of dynamic behaviour of long-period structures, Earthq. Sp., 15(1), 55–66.
Clough, R., Penzien, W. (1993). Dynamic of Structures, McGraw-Hill International Editions, Singapore.
Dei, D; Pieraccini, M., Fratini, M., Atzeni, C., Bartoli, G. (2009) “Detection of vertical bending and torsional movements of a bridge using a coherent radar,” NDT&E International, 2009(6), 741–747.
Dodson, A.H., Meng, X., Roberts, G.W. (2001) Adaptive Method for Multipath Mitigation and its Application for Structural Deflection Monitoring. Proc International Symposium on kinematic Systems in Geodesy, Geomatics and Navigation (KIS 2001), Banff, Canada, 101–110, 5–8 June 2001.
Dong, D., Bock, Y., (1989). Global Positioning System network analysis with phase ambiguity resolution applied to crustal deformation studies in California, J. Geophys. Res., 94, 3949–3966.
Dow, J.M., Neilan, R.E., and Rizos, C., (2009) The International GNSS Service in a changing landscape of Global Navigation Satellite Systems, J. Geod. 83,191–198, https://doi.org/10.1007/s00190-008-0300-3.
ESA GeoSHM, https://business.esa.int/projects/geoshm-fs. Accessed 07 January 2019.
Frigo, M., and Johnson, S.G. (1998) “FFTW: An Adaptive Software Architecture for the FFT.” Proceedings of the International Conference on Acoustics, Speech, and Signal Processing. Vol. 3, 1998, 1381–1384.
Freymueller, J.T., Kellogg, J.N., Vega,V. (1993). Plate tectonics in the north Andean region, J. Geophys. Res., 98 (B12), 21853–21863.
Fulop, S.A., Fitz, K. (2006) Algorithms for computing the time-corrected instantaneous frequency (reassigned) spectrogram, with applications. J. Acoust. Soc. Am. 119, January 2006, 360–371.
Ge, L. Han, S., Rizos, C., Ishikawa, Y., Hoshiba, M., Yoshida, Y., Izawa, M., Hashimoto, N., Himori, S. (2000), GPS seismometers with up to 20 Hz sampling rate, Earth Planet Sp., 52(10), 881–884.
Geng, J., Shi, C., (2017). Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously, J. Geod., 91(4), 361–374.
Geng, J., **aotao, L., Zhao, Q., Li, G. (2018). Inter-system PPP ambiguity resolution between GPS and BeiDou for rapid initialization, J. Geod. 93(3), 383–398. https://doi.org/10.1007/s00190-018-1167-6.
Häberling, S., Rothacher, M., Zhang, Y., Clinton, J.F., Geiger, A., (2015). Assessment of high-rate GPS using a single-axis shake table. J. Geod. 89(7), 697–709. https://doi.org/10.1007/s00190-015-0808-2.
Hein, G.W., Werner, B.W., Ott, B., Elrod, B.D., Barltrop, K.J., Stafford, J.F. (1997) Practical investigation on DGPS for aircraft precision approaches augmented by pseudolite carrier-phase tracking. Proceedings of 10th Int. Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, Kansas City, Missouri, 16–19 Sept., 1851–1860.
Hide, C.D., Blake, S., Meng, X., Roberts, G., Moore, T. and Park, D., 2005. An Investigation in the use of GPS and INS Sensors for Structural Health Monitoring In: 18th Technical Meeting of the Satellite Division of the Institute of Navigation. 2029–2038.
Hofmann-Wellenhof, B., Lichtenegger, H., Collins, J. (2001) Global Positioning System. 5th edition. Springer-Verlag Wien. ISBN 978-3-211-83534-0 DOI https://doi.org/10.1007/978-3-7091-6199-9.
Holden, T. and Morley, T. (1997). Pseudolite augmented DGPS for land applications, 10th Int. Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation GPS ION-97, Kansas City, Missouri, 16–19 September, 1397–1403.
Hudnut, K.W., Behr, J.A. (1998). Continuous GPS monitoring of structural deformation at Pacoima Dam, California, Seism. Res. Lett., 69(4), 299–308.
Hudnut, K.W., Bock, Y., Cline, M., Fang, P., Feng, Y., Freymueller, J., Ge, X., Gross, W.K., Jackson, D., Kim, M., King, N.E., Langbein, J., Larsen, S.C., Lisowski, M., Shen, Z.-K., Svarc, J., Zhang, J. (1994). Co-seismic displacements of the 1992 landers earthquake sequence, Bull. Seism. Soc. Am., 84(3), June 1994.
Hudnut, K.W., Shen, Z., Murray, M., McClusky, S., King, R., Herring, T., Hager, B, Feng, Y., Fang, P., Donnellan, A., Bock, Y. (1996). Coseismic displacements of the 1994 Northridge, California, earthquake, Bull. Seism. Soc. Am., 86, S19-S36.
Karuna, R., Yao, M.S., Brown, C.J.and Evans, R.A., (1997) “Modelling and Analysis of the Humber Bridge” IASS International Colloquium on Computation of Shell and Spatial Structures (ICCSS’97), Taiwan, November.
Karuna, R., Yao M.S., Brown C.J. and Evans R.A., (1998) “In-service modelling of the Humber Bridge”, IABSE Symposium “Long Span and High-Rise Structures”, Kobe, September, Session Number 42: “Long Span Bridges”.
Kondo, H., Cannon, M.E., (1995). Real-time landslide detection system using precise carrier phase GPS, ION GPS 95 Conference, The Institute of Navigation, Palm Springs, CA, September.
Langley, R, 1998. Propagation of the GPS Signals. in: P. J. G. Teunissen, Alfred Kleusberg, ed. GPS for Geodesy. Berlin: Springer, 1998, pp. 140–143.
Lau, L. (2017) Wavelet Packets Based Denoising Method for Measurement Domain Repeat-time Multipath Filtering in GPS Static High-Precision Positioning. GPS Solut., 21(2), 461–474. https://doi.org/10.1007/s10291-016-0533-1.
Leick, A., Rapoport, R., Tatarnikov, D. (2015) GPS Satellite Surveying, Fourth Edition. John Wiley and Sons, inc. ISBN:9781118675571 https://doi.org/10.1002/9781119018612.
Li, X., Zhang, X., Ren, X., Fritsche, M., Wickert, J., Schuh, H. (2015), Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou, Sci. Rep., 5, 8328.
Lovse, J.W., Teskey, W.F., Lachapelle, G., Cannon, M.E. (1995). Dynamic deformation moniotoring of tall structure using GPS technology, J. Surv. Eng., 121(1), 35–40.
Luzi G, Crosetto M. (2014) Building monitoring using a ground‐based radar. Enc Earthquake Eng. 2014;1–13.
Marchisio, M., Piroddi, L., Ranieri, G., Calcina, S.V., Farina, P. (2014) Comparison of natural and artificial forcing to study the dynamic behaviour of bell towers in low wind context by means of ground‐based radar interferometry: the case of the Leaning Tower in Pisa. J Geophys. Eng. 11(5):055004.
Mayrbaurl, R. M. and Camo, S., (2004) National Cooperative Highway Research Program Report 534, Guidelines for Inspection and Strength Evaluation of Suspension Bridge Parallel Wire Cables. Transport Research Board of the National Academies, Washington, D.C. www.TRB.org.
Meng, X. (2002). ‘‘Real-time deformation monitoring of bridges using GPS/accelerometers.’’ PhD thesis, IESSG, The University of Nottingham, U.K.
Meng, X., Roberts, G.W., Dodson, A.H., Cosser, E., Noakes, C. (2002) Simulation of the Effects of Introducing Pseudolite Data into Bridge Deflection Monitoring Data, Proc Second Symposium on Geodesy for Geotechnical and Structural Engineering, Berlin, Germany, May 21–24 2002, ISBN 3-9501492-1-X, pp 372–381.
Meng, X., Roberts, G.W., Dodson, A.H., Cosser, E., Barnes, J., Rizos, C. (2004) Impact of GPS Satellite and Pseudolite Geometry on Structural Deformation Monitoring: Analytical and Empirical Studies. J. Geod. 77(12), 809–822. https://doi.org/10.1007/s00190-003-0357-y.
Meng, X., Dodson, A.H., Roberts, G.W., (2007). Detecting Bridge Dynamics with GPS and Triaxial Accelerometers. Engineering Structures. 29(11), 3178–3184. https://doi.org/10.1016/j.engstruct.2007.03.012.
Montillet, J. P., Meng, X., Roberts, G.W., Taha, A., Hancock, C., Ogundipe, O., Barnes, J. (2007) Achieving Centimetre-level Positioning Accuracy in Urban Canyons with Locata Technology. Journal of Global Positioning Systems. 6(2), 158–165, ISSN 1446-3156.
Montillet, J. P., Roberts, G.W., Hancock, C., Meng, X., Ogundipe, O., Barnes, J., (2008) Deploying a Locata Network to Enable Precise Positioning in Urban Canyons. J. Geod. 82(6), 91–103. https://doi.org/10.1007/s00190-008-0236-7.
Montillet J.P., Szeliga W.M., Melbourne T.I., Flake R.M., Schrock G. (2016) Critical infrastructure monitoring with global navigation satellite systems. J. Surv. Eng., doi:04016014.
Moschas, F., Stiros, S. (2014). PLL bandwidth and noise in 100 Hz GPS measurements, GPS Solut., 19(2), 173–185. https://doi.org/10.1007/s10291-014-0378-4.
Msaewe, H., Hancock, C., Psimoulis, P., Roberts, G., Bonenberg, L., de Ligt, H., (2017). Investigating multi-GNSS performance in the UK and China based on a zero-baseline measurement approach, Measurement, 102, 186–199. https://doi.org/10.1016/j.measurement.2017.02.004.
Nadarajah, N., Teunissen, P.J., Raziq, N. (2013), BeiDou inter-satellite-type bias evaluation and calibration for mixed receiver attitude determination, Sensors (Basel), 13(7), 9435–9463.
Nickitopoulou, A., Protopsalti, K., Stiros, S. (2006). Monitoring dynamic and quasi-static deformations of large flexible engineering structures with GPS: Accuracy, limitations and promises, Engineering Structures, 28(10), 1471–1482.
Ochieng, F. X., Hancock, C. M., Roberts, G. W., Le Kernec, J. (2018) A review of ground-based radar as a non-contact sensor for structural health monitoring of in-field wind turbines blades. Wind Energy. 21(12), 1435–1449. https://doi.org/10.1002/we.2252.
Ogundipe, O., Roberts, G.W., Brown, C.J., (2014) GPS monitoring of a steel box girder viaduct. Structure and Infrastructure Engineering: Maintenance, Management, Life-Cycle Design and Performance. 10(1), 25–40. https://doi.org/10.1080/15732479.2012.692387.
Pagiatakis, S. (1999). Stochastic significance of peaks in the least-squares spectrum, J. Geod., 73(2), 67–78.
Prasad R. (1998) Universal Wireless Communications, Artech House Publisher, 1st Edition.
Psimoulis, P., Ghilardi, M., Fouache, E., Stiros, S. (2007). Subsidence and evolution of the Thessaloniki plain, Greece, based on historical levelling and GPS data, Eng. Geol., 90(1–2), 55–70.
Psimoulis, P., Stiros, S. (2008). Experimental assessment of the accuracy of GPS and RTS for the determination of the parameters of oscillation of major structures. Computer-Aided Civil and Infrastructure Engineering. 23, 389–403. https://doi.org/10.1111/j.1467-8667.2008.00547.x.
Psimoulis, P., Pytharouli, S., Karabalis, D., Stiros, S. (2008). Potential of Global Positioning System (GPS) to measure frequencies of oscillations of engineering structures, J. Sound. Vib., 318(3), 606–623. https://doi.org/10.1016/j.jsv.2008.04.036.
Pytharouli, S., Stiros, S. (2008). Spectral analysis of unevenly spaced or discontinuous data using “normperiod” code. Comp. Str., 86(1-2), 190–196. https://doi.org/10.1016/j.compstruc.2007.02.022.
Quan, Y., Lau, L., Roberts, G.W., Meng, X., Zhang, C. (2018) Convolutional Neural Network Based Multipath Detection Method for Static and Kinematic GPS High Precision Positioning. Remote Sensing. 10 (12), 2052. https://doi.org/10.3390/rs10122052.
Ray, J.K. (1999). Use Multiple Antennas to Mitigate Carrier Phase Multipath in Reference Stations. In: Proc of ION GPS’99. Nashville: 14–17 September, 1999, 269–279.
Roberts, G., Meng, X., Dodson, A., Cosser, E., (2002) The Use of Pseudolites to Augment GPS Data for Bridge Deflection Measurements. Presented at The 15th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, Oregon, USA, September 2002.
Roberts, G.W., Brown, C.J., Meng,X., (2006a) Bridge Deflection Monitoring; Tracking Millimeters across the Firth of Forth. GPS World, February 2006, 17(2), 26–31, ISSN 1048-5104. Questex Publications.
Roberts, G.W., Meng, X., Brown, C.J., Dallard, P. (2006b). GPS measurements on the London Millennium Bridge. Proc. ICE, Bridge Eng. 159(4), 153–162. DOI: https://doi.org/10.1680/bren.2006.159.4.153.
Roberts, G.W., Montillet, J-P., de Ligt, H., Hancock, C., Ogundipe, O., Meng, X., (2007) The Nottingham Locatalite Network. In Proceedings of the International Global Navigation Satellite Systems Society (IGNSS) Symposium 2007, The University of New South Wales, Sydney, Australia, 4–6 December, 2007.
Roberts, G.W., Bonenberg, L.K., Hancock, C., (2009) Integrating Locatalites And GNSS For Engineering Works. FIG Regional Conference, Hanoi, Vietnam, 19–23 October 2009.
Roberts, G.W., Brown, C.J., Meng, X., Ogundipe, O., Atkins, C., and Colford, B. (2012). Deflection and frequency monitoring of the Forth Road Bridge, Scotland, by GPS. Proc. ICE. Bridge Eng. 165(2), 105–123. https://doi.org/10.1680/bren.9.00022.
Roberts, G.W., Brown, C.J., Tang, X. (2014) A Tale of Five Bridges; the use of GNSS for Monitoring the Deflections of Bridges. J. Appl. Geod. 8(4), 241–264. https://doi.org/10.1515/jag-2014-0013.
Roberts, G.W., Tang, X., (2017a) The use of PSD Analysis on BeiDou and GPS 10 Hz Dynamic data for change detection. Adv. Space Res. 59 (11), 2794–2808. https://doi.org/10.1016/j.asr.2016.10.020.
Roberts, G.W., Brown, C.J., Tang, X. (2017b) Correlated GNSS and Temperature Measurements at 10-Minute Intervals on the Severn Suspension Bridge. J. Appl. Geomat. 9(2), 115–124. https://doi.org/10.1007/s12518-017-0187-x.
Roberts, G.W., Tang, X., Brown, C.J. (2018) Measurement and Correlation of Displacements on the Severn Suspension Bridge using GPS. J. Appl. Geomat. Published online 17 December 2018. https://doi.org/10.1007/s12518-018-00251-6.
Stiros, S. (2008). Errors in velocities and displacement deduced from accelerographs: An approach based on the theory of error propagation. Soil Dyn. Ear. Eng., 28(5), 415–420.
Takasu. T. (2013) “Rtklib ver. 2.4.2 manual. http://www.rtklib.com/prog/manual 2.4.2.pdf,” Tech, 2013.
Tang, X., Roberts, G.W., Li, X., Hancock, C.M., (2017) Real-time kinematic PPP for structure monitoring, in case of the Severn Bridge, UK. Adv. Space Res. 60 (5), 925–937. https://doi.org/10.1016/j.asr.2017.05.010.
Tang, X., Li, X., Roberts, G.W., Hancock, C.M., de Ligt, H., Guo, F. (2018) 1 Hz GPS Satellites Clock Correction Estimations to Support High-Rate Dynamic PPP GPS applied on the Severn Suspension Bridge for Deflection Detection. GPS Solut. 23:28. https://doi.org/10.1007/s10291-018-0813-z.
Teferle, F.N., Bingley, R.M., Dodson, A.H., Baker, T.F., (2002). Application of the dual-CGPS concept to monitoring vertical land movements at the tide gauges, Phys. Chem. Ear., 27(32–34), 1401–1406.
Wang, J. Dai, L. Tsujii, T., Rizos, C., Grejner-Brzezinska, D., Toth, C.K. (2001) ‘GPS/INS/Pseudolite Integration: Concepts, Simulation and Testing’, in US Institute of Navigation (ed.), 14th International Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, The Institute of Navigation (ION), Salt Lake City, Utah, pp. 2708–2715, presented at 14th International Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, Salt Lake City, Utah, 11–14 September 2001, https://www.ion.org/publications/abstract.cfm?articleID=1950.
Wang, J., Feng, Y., (2012), Reliability of partial ambiguity fixing with multiple GNSS constellations, J. Geod., 87, 1–14.
Weik M.H. (2000) Nyquist theorem. In: Computer Science and Communications Dictionary. Springer, Boston, MA.
Westgate, R., Koo, K.Y., Brownjohn, J. (2014) Effect of solar radiation on suspension bridge performance. J. Bridge Eng. 20(5), 04014077. https://doi.org/10.1061/(asce)be.1943-5592.0000668.
Yu, J., Yan, B., Meng, X., Shao, X., Ye, H. (2018) Measurement of Bridge Dynamic Responses Using Network-Based Real-Time Kinematic GNSS Technique. J. Surv. Eng. 142(3). https://doi.org/10.1061/(asce)su.1943-5428.0000167.
Zhang, B., Ding, X., Werner, C., Tan, K., Zhang, B., Jiang, M., Zhao, J., Xu, Y. (2018) Dynamic displacement monitoring of long‐span bridges with a microwave radar interferometer. ISPRS J. Photogramm. Remote Sens. 138(2018), 252–264. https://doi.org/10.1016/j.isprsjprs.2018.02.020.
Zumberge, J.F., Heflin, M.B., Jefferson, D.C., Watkins, M.M., Webb, F.H. (1997). Precise Point Positioning for the efficient and robust analysis of GPS data from large networks, J. Geophys. Res. Sol. Ear., 102 (B3), 5005–5017.
Acknowledgements
For over 20 years the authors have been very fortunate and grateful for the help from various organisations and individuals from the organisations. These include the Humber Bridge Board, and Roger Evans in particular. Forth Estuary Transport Authority and Alistair Andrew and Barry Colford. Skanska and The Severn Crossing plc, in particular Jon Phillips and Adrian Burt, Mott Macdonald and Jeff Fisher. Arups for the access to the Millennium Bridge, and Pat Dallard in particular. Colleagues at Leica Geosystems for the loan of equipment. Other individuals include various colleagues, Ph.D., M.Sc. and undergraduate students who have taken part in the field trials, processed and analysed the data from the several subsequent studies that have underpinned the knowledge and techniques in this chapter. Some of the GNSS data used for this paper were obtained from the Curtin GNSS Research Centre at Curtin University http://saegnss2.curtin.edu.au/ldc/, as well as the IGS and the Ordnance Survey UK.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
12.1.1 Severn Bridge GNSS Surveys
The Severn suspension bridge connects South Wales with the south west of England. It is a 1.6 km long suspension bridge, consisting of three sections carrying 4 lanes of the M48 motorway. The mid-section, being the longest, is 988 m long, and has a clearance of 47 m. The support towers are 136 m high. The bridge was opened on the 8th September 1966. After the discovery of significant corrosion within the suspension cables of a number of bridges in the USA, a guide was established by the US Transport Research Board, known as NCHRP Report 534 (Mayrbaurl and Camo 2004). The guide was subsequently used on a number of suspension bridges in the UK, including the Humber, Forth and Severn. Significant and more than expected corrosion was detected (Colford 2010). In addition to this, the wire strands that made up the suspension cables were also experiencing breakages (Cocksedge et al. 2010). Ongoing remedial engineering work was underway during the period of the 2010 survey conducted by the authors, and the remedial work had been completed by the time the 2015 survey took place; both of these surveys are described below.
Two surveys were carried out, one each in 2010 and 2015. Both surveys consisted of placing between 9 and 12 GNSS antennas at specific locations on the bridge’s suspension cables, support towers and bridge deck. Data were gathered at either 10 Hz or 20 Hz over 3 or 4 day periods. The antennas on the tower tops and on the suspension cables were put in position by staff from the bridge authority, and they trailed the antenna cables down into the void within the towers or to the footpath on the bridge in order to allow the authors to gain easy and safe access.
The survey in 2010 took place from around midday on the 10th March 2010 to approximately the same time on the 12th March, and again between 10 am to 4 pm on the 18th March. Figure 12.37 (top) illustrates the location of the various GNSS antennas used. Due to the limited number of GPS receivers available, locations D and E had to share a receiver. Leica SR530 dual frequency GPS receivers were used on the tower tops, with AT504 choke ring antennas, and Leica series 1200 GNSS receivers on the cable locations. Two GNSS receivers were located as reference stations, Leica 1200 units. One as the main reference station and one as a backup, as well as used in order to check the quality of the main reference station. Locations C and E were used for the torsional movement analysis. It wasn’t possible to place a GPS antenna on the middle of the mid span on the south side of the bridge, due to ongoing maintenance work. Therefore, locations C and E were used.

Schematic bridge GNSS layout, 2010 survey (top), 2015 survey (bottom), include WIM
During the 2015 survey, the GNSS antennas were placed in approximately the same location as the 2010 survey, Fig. 12.37 (bottom). The survey took place from 3 pm on the 20 July 2015 to 4 pm on the 23 July 2015, gathering data continuously apart from downloading the data every couple of hours. Trimble NETR9 GNSS receivers were used at locations T1 and T2, Javad Delta receivers at locations A and D, Leica GS10 receivers at locations B, F, T3 and T4, as well as at the two reference stations, and a roving Leica 1200 receiver was used at locations A1, B1, D1 and G for set periods. Figure 12.38 illustrates example locations.

Locations of some of the GNSS antennas, clockwise from top left Tower top T3 (top left), Clamped onto the hand rail location G (top right), Location A (bottom right), Reference receiver on the roof of a toll building (bottom left)
12.1.2 Humber Bridge GNSS Surveys
The Humber Estuary is located in the north-east of England, and as it runs eastwards into the North Sea becomes a wide expanse of water, separating towns of Hull and Grimsby that were originally major fishing ports. While traffic flow between the two towns was not excessive prior to the bridge’s construction the inland route to the nearest inland crossing point involved a journey of some 125 km taking approximately 90 min. Journey times are now halved and the distance is reduced to about 50 km.
The Humber Bridge is a single-span suspension bridge with associated side spans from Barton on the south side (530 m) and Hessle on the north (280 m). It was completed in 1981 and has a main span of 1,410 m. The streamlined low drag closed box-girder steel decks exhibit “negative lift” in wind conditions. The concrete towers are relatively flexible while the inclined hangers are thought to have been designed to provide additional longitudinal stiffening. The total deck width is 28.5 m and the depth of the box deck is 4.5 m. The box deck was formed from 18.1 m long prefabricated sections with four equi-spaced transverse diaphragms to improve torsional stiffness. The total deck weight is approximately 17,000 tonnes.
The bridge has been in continuous satisfactory operation since opening. The Humber Bridge Board, responsible for the operation of the bridge, commissioned a numerical (finite element) model of the structure that was completed in 1997; full details are presented elsewhere (Karuna et al. 1997, 1998). The computer-based modelling technology was not available at the time the bridge was designed and built, and while it now enables rapid prediction of behaviour under “what if” scenarios, it needs to be validated to ensure full confidence; GPS data were used to compare predicted displacements (Brown et al. 1999) against measured under known load conditions to achieve the validation. Attempts to measure movements using optical methods proved less productive (Brownjohn et al. 1994).
In the monitoring exercise of 1998, most of the available GPS antennas were placed along the eastern edge of the bridge on the handrail, with one on the western side, and a further reference station placed at a static site whose position was known. The GPS system consisted of Ashtech ZXII 5 Hz dual frequency receivers, Racal Delta Link II UHF telemetry links, Ashtech’s signal processing software, and post-processing using specialist software developed at the University of Nottingham.
The key element of validation was the measurement of behaviour under known loads. A planned single 180 tonne lorry passage had been due for the late evening/early morning of 15/16 February 1998, but this was cancelled at the last minute and so five lorries, each approximately 32 tonnes, were used in convoy. The bridge was temporarily closed to other traffic. Weather conditions were quite calm when the equipment was being set up, but by the time the tests commenced, the temperature had dropped to 9 °C, and south-westerly winds had increased to approximately 14.8 m/s with peaks of 19.6 m/s.
The lorry convoy initially ran from north to south at a constant speed (about 7.5 m/s) taking some 180 s to complete the traverse of the main span. The process was repeated for south to north. Finally 4 lorries (128 tonnes) were stationed at mid span and static measurements taken. A full description is given elsewhere (Brown et al. 1999).
12.1.3 Forth Road Bridge Surveys
The Forth Road Bridge crosses the Firth of Forth and links the north of Scotland with Edinburgh and the south of the A90 road. The bridge length is 2.5 km and the main span length is 1,006 m. It opened in 1964 and the traffic volume has already surpassed 24 million vehicles per annum, around 11 times more than the traffic volume in 1965. Figure 12.39 is a picture of the Forth Road Bridge.

Forth Road Bridge in the UK, with two Leica SR530 dual frequency GPS receivers utilising AT503 lightweight choke ring antennas acting as the reference stations. (Note the queuing traffic on the southbound carriageway)
Before the opening of the Queensferry Crossing in September 2017, the Forth Road Bridge (FRB) was the major road link across the Fifth of Forth, Scotland; a single-lane closure of the FRB was estimated to cause a loss of £650,000 daily. The direct cost for the closure of the FRB in December 2015 was estimated at £65 m. Since 2005, episodic campaigns have been carried out on the FRB. Now a permanent system called GeoSHM has been set up on the FRB by a consortium consisting of UbiPOS UK Ltd., the University of Nottingham, Leica Geosystems and GVL supported by Amey, Transport Scotland, China Railway and other GeoSHM stakeholders. The following sections include some snapshots of our work.
Data were gathered continuously from GPS receivers located on the bridge as shown in Fig. 12.40 (left). To ensure continuity of data two reference GPS stations were used, located on the southern end viewing platform of the north–south orientated bridge. A further five GPS receivers were fixed to the bridge deck and two GPS receivers were located on top of the southern support tower. This limited number was governed by the resources available for the trial. The majority of the GPS receivers used were Leica SR530 dual frequency receivers, with AT503 and AT504 choke ring antennas. A Leica SR510 single frequency receiver with a AT501 lightweight antenna were placed on the tower east (location A1) and a Leica GX1230 dual frequency GPS/GLONASS receiver and AT504 antenna were placed at location F. In addition, a high accuracy INS, POS-RS inertial measurement unit manufactured by Applanix (Richmond Hill, Canada) was also installed upon the bridge. The use of INS (inertial navigation systems) for bridge deformation monitoring has been presented elsewhere (Hide et al. 2005).

GPS sites on the Forth Road Bridge (left). A Leica AT504 choke-ring antenna located on the bridge handrail using a dedicated clamp (right)
All the GPS receivers gathered data for the test period at a minimum rate of 10 Hz. Data collection was interrupted only to download data from storage cards, when they reached their data limit—a process that took approximately 1 min. AC power was supplied at each receiver site. Figure 12.40 (right) illustrates a Leica Geosystem’s AT504 choke- ring antenna attached to the bridge handrail. All antennas at locations B–F on the bridge were fixed to the outer handrail in this manner (Roberts et al. 2006a, 2012). The frequency of the handrail was much higher than anything measureable.
A number of GPS antennas were used to investigate various aspects of antenna performance, particularly to understand multipath effects. These include the Leica AT 501 single frequency antenna, AT 503; a dual frequency lightweight choke-ring antenna, a Leica AT 504; a dual frequency heavy-weight choke-ring antenna as well as the NovAtel GPS 600 series antenna. A weather station was installed at mid span on the western footway to gather the temperature, relative humidity, wind speed and wind direction continuously.
During the trials, wind gusts of up to 22 m/s were experienced. Traffic loading could be very heavy, especially at rush hour times in the early morning and evening when tidal traffic flow was evident. In addition, coincidentally during the trials, a single approximately 100 tonne lorry passed over the bridge.
The data were processed in an on-the-fly manner using Leica GeoOffice 3.0. Once processed, the resulting files consisted of 3D coordinate data at a rate of 10 Hz, in WGS84 (GPS coordinates) with the corresponding precise time. The data were converted into a coordinate system relative to the bridge—Bridge Coordinate System (BCS), giving lateral (approximately E–W), longitudinal (along the direction of the bridge equals direction of travel) and vertical displacements.
12.1.4 Millennium Bridge Surveys
The London Millennium Bridge is a pedestrian bridge linking the City of London at St Paul’s Cathedral with the new Tate Gallery at Bankside. The bridge’s structural diagram is that of a shallow suspension bridge, where the cables are as much as possible below the bridge deck to free the views from the deck. Two groups of four 120 mm diameter locked coil cables span from bank to bank over two river piers. The lengths for the three spans are 81 m for the north span, 144 m for the main span between the piers and 108 m for the south span with a 4 m wide bridge deck. The sag of the cable profile is 2.3 m in the mid span, around 6 times shallower than a more conventional suspension bridge structure.
It was estimated that between 80,000 and 100,000 people crossed the bridge during its opening day on 10 June 2000. Analysis of the video footage showed a maximum of 2,000 people on the deck at any time, resulting in a maximum density of between 1.3 and 1.5 people per square metre. When large groups of people were crossing the bridge, greater than expected movement was experienced, mainly excessive lateral vibration. There was amplitude of 50 mm movement with a vibration frequency of about 0.77 Hz on the south span (the first south lateral mode), between Bankside and the first river pier. Up to 70 mm movements at frequencies of 0.5 and 0.95 Hz (the first and second lateral modes respectively) were experienced on the centre span. More rarely, movement occurred on the north span at a vibration frequency of just over 1.0 Hz. From the amplitude of movements on the south and central spans, the maximum lateral acceleration was between 200 and 250 mg. At this level of vibration acceleration, a significant number of pedestrians began to have difficulty in walking and used balustrades for support. No excessive vertical vibration was observed.
The bridge was closed on 12 June 2000 to fully investigate the cause of the movements. An extra £5 M was then spent to fit anti-wobble dampers and bracing into London’s £18.2 M Millennium Bridge (BBC 2019).
From 22 to 24 November 2000, a three-day viability study was carried out by the team from the Universities of Nottingham and Brunel University London on the London Millennium Bridge with the permission of Arup, the engineers of the bridge (Roberts et al. 2006b). Leica dual frequency GPS receivers were used on the bridge during its closure for retrofitting. The main objective was to validate the use of GPS to measure the deformation and vibration of the structure. The other objectives of this trial were to collect data from a new type of suspension bridge with an integrated GPS/accelerometer monitoring system and to test the system configuration and data logging software package.
Four sets of Leica SR530 dual frequency GPS receivers and associated AT504 choke ring antennas were used for the trial. This configuration pushed the capabilities of GPS to the forefront of current technology. One Kistler triaxial accelerometer, housed underneath the GPS antenna on point B (Fig. 12.41), with a dedicated laptop for data logging was also employed. Meteorological meters, such as a thermometer, barometer and hygrometer were used to record climate parameters when the tests were under way.

One observation site on the bridge
In total 11 h GPS measurements at a sample rate of 10 Hz and 4 h raw acceleration data at 200 Hz were taken, giving approximately 1.98 million 3D GPS points and 2.88 million 3D acceleration points.
The data gathering trials were conducted over five sessions during the three days. Each session had the GPS antennas located at three of the 5 observation sites. The reason to sub-divide a whole day’s measurement into sessions is due to the limitation of the receivers’ SD cards. At the time of the trial conducted, only 8 Mb cards were available to log the raw data, which can store about 3 h of 10 Hz data. Figure 12.42 illustrates the locations of the GPS antennas for the various sessions. One reference GPS receiver was set up on the roof of a nearby building. The survey points on the bridge were carefully located on the bridge’s handrail using clamps that were especially fabricated for this trial to fit the ellipse shape of bridge handrail (Fig. 12.41). The various sessions saw the antennas located at 3 of the 5 survey points per session. Point B, however, was occupied during all the sessions.

Layout of the observation sites on the London Millennium Bridge
12.1.5 Improving Data Using Multi GNSS
The use of GPS alone for measuring displacements on a large bridge has been shown to be successful most of the time. The case studies in this chapter illustrate the field tests and results obtained from a number of bridges. However, there are instances where GPS alone is not very effective. Such instances include those where the resulting GPS constellation is poor, or where multipath noise at either the reference station or bridge station affects the results, causing the integer ambiguity resolution and resulting positioning to either fail or to contain errors.
In order to improve the availability and reliability, as well as the precision of the GPS derived position, studies have been carried out investigating the integration of kinematic GPS with other sensors. Sometimes, such surveys are conducted in difficult environments to obtain full GNSS coverage. Along with physical constraints, the spread of satellites seen at any instant may result in poor satellite constellation geometry for the resulting position.
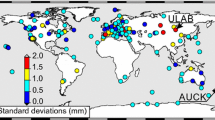
Today, there are around one hundred GNSS satellites transmitting data. These consist of mainly MEO (Mid Earth Orbiting) satellites, such as GPS, GLONASS, Galileo, and part of the BeiDou constellation, but there are other types such as SBAS (Space Based Augmentation Systems) GEO (Geosynchronous) orbits, Japan’s Quazi Zenith Satellite System (QZSS) IGSO (Inclined Geosynchronous Orbits) orbits, and also both GEO and IGSO orbits in addition to the MEO orbits used in the BeiDou constellation. Figure 12.43 illustrates the total number of GNSS satellites observed over Curtin University in Australia, on the 8th November 2018, ranging from 37 to 50 satellites at any one time. Considering that only a minimum of 5 GPS satellites are required to conduct an On-The-Fly ambiguity resolution, the question is which satellites are the optimum combination for real time positioning. Certainly, the use of 37–50 satellites to process kinematic data at a rate of 10 Hz or even 20 Hz would require tremendous processing power.

Number of GNSS satellites seen above Curtin University on the 8 November 2018
The nature of the GNSS MEO orbits results in circular shaped ‘gaps’ in the sky where there will never be any GNSS satellites seen. The location of the gaps depend on the latitude of the user. At the poles, the gap of MEO GNSS satellites will be directly overhead and at the equator there will be two semi-circular gaps at the north and south poles.
Figure 12.44 (left) illustrates the sky view over a 24 h period for GPS at Holyhead, in the UK. Holyhead has coordinates of 53° 19’ N 04° 39’ W. Figure 12.44 (right) illustrates a 24 h skyplot (a plot showing the satellites’ track in the sky overhead) for GPS and GLONASS at Holyhead gathered on the 8 November 2018. Here it appears that there is a good satellite coverage; however, the circular gap in the constellation can be seen due north where there will be no satellites seen. Due to the nature of the satellite orbits in the UK there are no GPS satellites to be seen anywhere from the zenith to the horizon in the northerly direction.

GPS satellite skyplot (left) and GPS/GLONASS skyplot (right) over a 24 h period above Holyhead, UK
Figure 12.45 (left) illustrates the same hole in the GPS data gathered at the IGS station (Dow et al. 2009) at Papua New Guinea (2° 03’ S, 147° 22’ E), which lies close to the equator. Here it can be seen that the hole exists in two halves over the north and south poles. Figure 12.45 (right) illustrates the same phenomenon at Curtin University’s GNSS data centre. The coordinates of this point are 32° 00’ S 115° 54’ E.

GPS satellite skyplot above Papua New Guinea (left) and Curtin, Australia (right) over a 24 h period
By looking at these 24-h skyplots, it seems that there is an abundance of GPS and GNSS satellites. However, if we examine specific instances this is not always the case. Figure 12.46 (left) illustrates the Dilution of Precision (DOP) values and corresponding number of GPS satellites seen over Curtin during a 24 h period, and there is a “spike” at around 06:10. Figure 12.46 (right) illustrates the number of GNSS satellites (GPS, GLONASS; BeiDou, Galileo, SBAS, QZSS) and corresponding DOP values. Here it can be seen that there are no spikes. Figure 12.47 (left) illustrates the GPS satellites in view over a 2 min period when the GPS DOP values in Fig. 12.46 (left) reach a peak. Here we see that there are only 5 GPS satellites in view above 15°, two of which (G12 and G02) are almost co-located, leading to poor conditioning. By examining the multi-GNSS scenario, Fig. 12.47 (right) we can see that there is a much better spread of satellites as well as a far increased number. However, the gap still exists in the constellation towards the south of the plot.

DOP values and number of satellites seen during 24 h above Curtin University for GPS only (left) and multi GNSS (right)

Sky plot over Curtin University 06:10–06:12 with GPS only (left) and multi GNSS (right)
GPS alone has its downfalls in terms of satellite availability as well as DOP values, resulting in noisy results in mainly the height and the north-south component of the resulting coordinates. In fact, during the research carried out in measuring the displacements of the Millennium Bridge in London (see case studies), this phenomena clearly affected the results.
Traditional static GPS processing, over 40 min duration of more would have averaged out some of this noise, but for bridge monitoring work, very fast GNSS data and unique coordinates from one epoch to the next are required, therefore such noise averaging is not appropriate for short term movements. A number of approaches have been adopted in order to improve the availability of the GPS constellation, and also to improve the precision of the final coordinates. These include the integration of GPS with external ranges measured using pseudolites and Locatalites, as well as integrating GPS with other GNSS.
12.1.6 Pseudolites
Pseudolites are terrestrial based GPS signal transmitters (Wang et al. 2001). A pseudolite consists of a directional transmitting antenna, and a signal generator. The antenna is placed upon a tripod located over a point with a known coordinate. The pseudolite transmits a signal on the L1 carrier frequency, and modulates an unused portion of the C/A code. Research into the use of pseudolites to enhance and plug any gaps in GPS constellation data was underway in the late 1990s (Choi et al. 2000), and applications such as aircraft landing (Holden and Morley 1997; Hein et al. 1997), and deformation monitoring (Barnes et al. 2003) were studied.
Compared with satellites in space, pseudolites can be optimally located, and this can significantly improve the geometric precision of positioning solutions, particularly for the height component. However, due to the comparatively small separation between pseudolites and user receivers, there are still some challenging modelling issues such as nonlinearity, pseudolite location errors, tropospheric delays, multipath and noise. In addition, not all GPS receivers can track pseudolite signals and there are near-far signal strength issues.
Following the Millennium Bridge field tests (see this chapter), the GPS data were re-created through simulation (Meng et al. 2002, 2004), and then simulated pseudolite data were added to the simulated GPS data to be able to process the two sets of simulated data, and compare the GPS only data with the original survey data, and then to compare the simulated data with the pseudolite simulation. Field trials were conducted with colleagues at the University of New South Wales on the Parsley Bay suspension footbridge in Sydney (Barnes et al. 2004a). Allstar GPS receivers were used for reference and rover stations. These GPS receivers allow individual channels to be assigned to track particular pseudorange number codes, and this is an essential requirement when using pseudolites (Barnes et al. 2003; Roberts et al. 2002).
At the time, the pseudolite data were not so easy to include in the GPS solution. Specially designed software at the University of New South Wales (UNSW) was used for the processing, that would incorporate the GPS data and ephemeris, as well as creating an ephemeris from the pseudolites based around their static position. The Allstar GPS receivers could gather both GPS and pseudolite data, but careful fitting of signal actuators was necessary as the strength of the pseudolite signal was far greater than that of the GPS.
Pseudolites if used incorrectly, could jam GPS signals and over time the use of pseudolites transmitting GPS signals on restricted frequencies became prohibited. Other alternative transmitting systems were investigated, and colleagues at UNSW were already investigating a relatively new system called Locatalites, produced by an Australian company called Locata (Barnes et al. 2003; Barnes et al. 2006).
12.1.7 Locatalites
Locatalites are transceivers, whereby a network of Locatalites are set up, which communicate to each other, and synchronise their times, using one master Locatalite as the master clock (Montillet et al. 2007, 2008). A rover unit is then positioned by measuring the ranges from the network, located on known positions. Locatalites transmit on the 2.4 GHz Industrial Scientific Medical (ISM) band (Prasad 1998), which has the advantage of being open access. Initially these were used independently of GPS, as they transmit data on non-GPS frequencies. Various experiments were conducted, including work on the Parsley Bay Bridge (Barnes et al. 2004b). Further research has been completed to integrate the Locatalite ranges with GPS, allowing a combined system that can be used for positioning in difficult environments for GPS alone (Roberts et al. 2007, 2009).
12.1.8 Integration of GNSS with Other Sensors
GNSS observations can serve as the spatial reference frame for other types of measurements such as those from accelerometers, tiltmeters and strain gauges. GNSS can be integrated with these terrestrial sensors to form a totally automated and continuously operating system. However, relatively low data rates offered by GNSS could not meet the requirements to monitor higher structural dynamics.
Accelerometers have been used extensively in bridge dynamics. Triaxial accelerometers measure three orthogonal accelerations simultaneously (Meng 2002). The sampling rate can be up to 200 Hz and this can be a very important characteristic when monitoring a bridge with high dynamics, such as short span bridges with higher stiffness and smaller movements. Triaxial accelerometers are not dependent on propagation of electromagnetic waves, and therefore avoid the problems of refraction, line of sight connections to the terrestrial or space objects, and do not have visibility problems caused by weather conditions. An accelerometer could form a completely self-contained system, utilising only measurements of accelerations to infer the positions of the system, through integration based on the laws of motion.
However, the positional drift of an accelerometer grows extremely rapidly with time and can reach hundreds of metres after intervals of a few minutes. The main error sources include instrumental biases and scale factor offsets. In normal applications, continuous updating is used to avoid error accumulation. These are operations that allow the errors to be either directly measured or modelled. The most common update is the Zero Velocity Update (ZUPT). Another method is the Coordinates Update (CUPT). It is the need to update that has severely restricted the widespread application of accelerometer technology as a standalone positioning method in surveying. In bridge deflection monitoring, it is impossible to conduct ZUPT. Only CUPT aided with GNSS fixes could be a realistic option to overcome the drift problem of accelerometers.
12.1.8.1 Integration Methods
In GNSS and accelerometer signal processing, both frequency-domain and time-domain approaches are used. Frequency-domain spectral approaches are used by engineers to identify the distribution of frequencies from acquired structural vibration time series (coordinates or acceleration). The frequencies detected from both data sets that are collected at the same time by GNSS and accelerometers are compared between them or with the baseline parameters to confirm that the real bridge vibration characteristics and. The noise of each individual sensor could also be separated from this procedure if correct noise cancellation algorithms, such as Adaptive Filtering (AF) are utilised. If the measurements are higher than the set threshold, alerts will be issued after a series of verifications. For bridge monitoring, ideally a real-time frequency-time domain method should be employed to observe how the individual mode frequencies change over time (ESA-GeoSHM Demo website 2019).
The aim of spectral analysis on the measurements is to clean the time series data sets. This is realized by digital filters. Three types of filters of low pass, high pass, or band pass characteristics are widely used in the data processing of time-domain sequences (Meng et al. 2007).
A software package (Meng 2002) has been further enhanced to conduct spectral analysis, filtering and data fusion of GNSS and accelerometers based on Discrete Fourier Transform (DFT) and inverse DFT (IDFT) approaches as shown in Fig. 12.48. Through selecting suitable parameters such as the sample length, windows, amount of overlap, and data rate, spectral analysis was used for isolating and detecting the dominant structural vibration amplitudes and frequencies from GNSS and accelerometer data. Whilst the vibration frequencies can be easily identified from the spectrum of 3D accelerations, it is very difficult to detect these from the GNSS spectrum since most of the frequency signatures are covered by the same band noise signatures and also because of a relatively slow sampling rate of GNSS positioning. In most spectrums of GNSS positions, very low frequencies characterise high levels of multipath.

The Flowchart of GPS and accelerometer data integration (Meng 2002)
According to this analysis, it is apparent that the spectrum method can be used to clean or suppress higher frequency noise based on the structure type, material etc. Analysis of both the GNSS and the accelerometer data can supply mutual checks to ensure further data processing is correctly applied. The spectrum approach is sometimes not applicable for extracting the frequencies in these bands. Without the support from a triaxial accelerometer, it is impossible to select suitable cut-off frequencies in 3D deflection directions.
Figure 12.49 shows a measured vertical acceleration time series (Meng 2002). In Fig. 12.49 the peaks were when the bridge was excited by the team members who created forced vibrations.

Vertical time series of an accelerometer on the Wilford Footbridge in Nottingham, UK
Since GPS receivers were also used to gather the data sets Fig. 12.50 shows epoch by epoch comparison between relative displacements calculated from GPS and accelerometer measurements. This is the approach used to check for the time synchronisation and effects of using double integration of acceleration to attain relative displacement. It can be found that both time series match very well in terms of amplitude and vibration cycle.

Epoch by epoch comparison of the relative displacements from GNSS and accelerometer data
Figure 12.51 illustrates the results of spectral analysis to the vertical components of one of the peaks in Fig. 12.49. It shows the limitation of the 10 Hz GNSS measurement since it cannot identify any frequencies higher than 5 Hz but the accelerometer has detected the frequencies up to 50 Hz.

Comparison of spectra of the vertical dynamic response by an accelerometer and the vertical displacement by a GNSS receiver
Figure 12.51 illustrates the results from spectral analysis of the data sets gathered from the Forth Road Bridge with a GPS receiver and a triaxial accelerometer collocated at a quarter span site. The data rate of the accelerometer is 100 Hz and the GPS is set to 10 Hz. It can be seen that on the lower part (<1 Hz) of both spectrums the 3D vibration frequencies match very well but on the higher part (5 Hz) this accelerometer has identified more frequencies which cannot be achieved with the GPS receiver.
12.1.8.2 Adaptive Filtering for Time Series Degradation Due to Multipath
In a GNSS-based bridge monitoring system, multipath is one of the major error sources induced by the observation environment. Since the reference stations used for deformation monitoring purposes are setup close to the bridge and short baselines of less than 3 km are processed to obtain positioning solutions, ionospheric delay is not a major error source, but since multipath changes its phase and amplitude all the time with the changes of GNSS satellite constellation and fully depends on the ambient environment of a monitoring site, it is very difficult to use mathematical models to quantify multipath signature and reduce its influence (Dodson et al. 2001). In many engineering applications, multipath becomes a very troublesome factor (Barnes et al. 1998).
Research reveals that the amplitude of carrier phase multipath can reach several centimetres in extreme situations and typically has a period of a few minutes (Langley 1998) but the period depends on the spatial relationship of the antenna, satellites and a reflecting object. The multipath caused by a passing vehicle can be less than 1 s duration. It can become the dominant error source and cause measurability problems when GNSS is employed to detect the same vibration frequencies. Due to its practical and academic importance, many research projects have been conducted onto the multipath mitigation techniques.
For mitigating multipath at the reference stations, a closely setup multiple antenna array was proposed by the University of Calgary in Canada (Ray 1999). A Kalman filter-based algorithm was developed to use multipath corrupted measurements from these antennas to estimate the multipath and geometric parameters, from which the multipath signatures in the code and carrier phase measurements at each antenna can be estimated. This has the potential to be used in a real-time mode at reference stations to generate corrections for kinematic applications. To realise the above procedure is far from an easy task. It involves specific receiver hardware design as well as receiver firmware development before it can be applied in practical applications. A day-to-day method is adopted to mitigate GPS multipath by using multipath characteristics of repeating signature within two sidereal days. This approach can improve accuracy of the GPS time series by about 50% (Bock et al. 2000). Moving average (MA) is an alternative method used to reduce multipath effects when the real bridge vibration frequencies are known (Dodson et al. 2001). However, as it has been pointed out this approach will not be efficient when the vibration frequencies of the bridge movements are at the same frequency band as multipath. It is not possible to isolate them from each other.
New types of antennas can greatly reduce or remove multipath effects and these include various choke ring antennas available on the market, but using a new type of antenna means an increase in the instrument investment.
In structural deflection monitoring, the complexity of the surveying environment and the surrounding infrastructure as well as the limitations in surveying site selection make multipath an unavoidable error source and even a dominant component in the time series of the final coordinates. Very strict requirements on the measurement accuracy, and deformation ranges varying from several millimetres up to several metres, and real-time kinematic surveying mode challenge the application of GNSS technology to structural deflection monitoring. Research into the effective multipath reduction is of great practical importance.
Simulation reveals the efficiency of an adaptive filtering (AF) approach largely depends on the degree of correlation of the two time series (Meng 2002). The higher the correlation, the better the AF technique is able to strip out the noise from the positioning solutions.
The time series as the inputs to an AF system can be the processed coordinates, or raw GPS measurements such as pseudorange and carrier phases as well as the correlated data sets from other sensors collected simultaneously with GPS. Suppose two time series di and xi, which could be the coordinate time series at one observation site or the raw pseudorange measurements on two consecutive days. di and xi could be vectors of same length or vectors of different lengths. In the AF approach, only vectors with the same length are considered as the desired and reference input signals.
Figure 12.52 shows the fundamental of the application of AF algorithm for extracting multipath signature from a short span bridge in Nottingham. The time series are gathered from two consecutive days (Day1 and Day2). The first row of this figure is the vertical movement time series for the first day and the second row is the data for the second day but shifted by 4 min to consider GPS constellation repeatability. The third row is isolated time series only relevant to the first day that consists of random noise (Rdm) and real bridge movement (Dfm) detected for Day1 and the fourth row is the common part of the first day and second day which is the site-related multipath signature. To test the effectiveness of this method, spectral analysis is carried out on individual time series and the results are included in Fig. 12.53. After applying the AF method, the multipath signature has been completely removed from the first day time series (the flat spectrum of Rdm + Dfm time series is the indication for this claim since this is the spectrum of the third row of Fig. 12.52).

AF results from normally aligned data

AF results from exactly aligned data
12.1.9 Current Implementation
GNSS is being implemented on many bridges, in particular in Asia, as part displacement monitoring system, feeding into a Structural Health Monitoring system. The cost of such a scheme compared to the cost of a major suspension or cable stayed bridge is small, but the benefits could include the better understanding of the characteristics of such a structure, extension of the structure’s life, early warning of deterioration or failures on the structure.
12.1.9.1 Current Work on the Forth Road Bridge
Under the Integrated Application Promotion (IAP) scheme of the European Space Agency (ESA), the GeoSHM consortium, led by the University of Nottingham, was awarded a feasibility study grant in 2013 to investigate how to use integrated GNSS and Earth Observation technologies for the structural health monitoring of large bridges. During the GeoSHM FS period a small monitoring system was installed on the Forth Road Bridge and the consortium have gathered huge data sets and rich experience regarding the design and implementation of GeoSHM according to essential user needs. The GeoSHM FS was chosen by ESA as a showcase project due to its significant potential for monitoring large bridges and beyond through interpreting key parameters for assessing the operational status. To fully explore the opportunities of the GeoSHM FS project ESA further sponsored its second phase of development of 2.3 million Euros which is led by UbiPOS UK Ltd., together with its key partners and users—Transport Scotland and China Railway, through expanding the GeoSHM FS system and installing a modified GeoSHM system onto three demonstration bridges in the UK and China. The GeoSHM Demo Project began in March 2016 and will last for three years. It focuses on addressing the major drawbacks of the GeoSHM FS Project and develo** a smart data strategy to fully reflect the end user needs. It also aims to promote its new uses for other structures such as high-rise buildings, dams, etc.
12.1.9.2 Overall GeoSHM System Architecture
The main aim of structural health monitoring of bridges is to use different kinds of sensors to measure and quantify the induced excitation and its corresponding response, and make comparisons with theoretically designed thresholds or models of the structure for the evaluation of the health condition of bridges. The overall GeoSHM system architecture for the FRB is shown in Fig. 12.54, which can be divided into five sub-systems: the sensor module, data collection and transmission module, data processing and monitoring module, bridge structure evaluation and early warning module and data management module.

Overall GeoSHM system architecture
The sensor module comprises a range of different sensors to monitor not only the structural responses of the bridge (displacement, acceleration, inclination and stresses) but also external loads applied on the bridge (wind load and traffic weight) and the short- and long-term environmental effects (temperature, weather conditions and ground movements).
12.1.9.3 Results and Discussion
The GeoSHM system has been running since September 2014 and the team has gathered more than 6 Tb worth of data during the incremental sensor installations, not only from on-site sensors but also from processing remote sensing data sets to understand the land movements of surrounding areas of the bridge and its impact on the stability to the bridge. The sensor installations will be completed by the end of 2018 and the system will then run in its full status of operation. The current focus of the GeoSHM Demo Project is on the development of data strategy but a further grant awarded jointly by Innovate UK and China will focus more on pattern recognition using machine learning and big data analytics. Table 12.4 lists the vibration frequencies through processing the data sets gathered at the mid span site SHM3 in July 2017 when an extensive modal test was carried out.
The GeoSHM system has the ability to conduct real-time loading and response analysis, especially wind and deformation analysis, based on the huge data gathered over the past 4 years. This makes the GeoSHM system able to issue real-time alerts to the current bridge contractor Amey if any changes are identified.
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Roberts, G.W., Meng, X., Psimoulis, P., Brown, C.J. (2020). Time Series Analysis of Rapid GNSS Measurements for Quasi-static and Dynamic Bridge Monitoring. In: Montillet, JP., Bos, M. (eds) Geodetic Time Series Analysis in Earth Sciences. Springer Geophysics. Springer, Cham. https://doi.org/10.1007/978-3-030-21718-1_12
Download citation
DOI: https://doi.org/10.1007/978-3-030-21718-1_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-21717-4
Online ISBN: 978-3-030-21718-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)