
Abstract
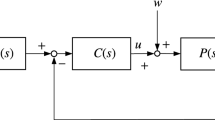
In this paper, we consider control systems utilizing so-called Clegg integrators. A Clegg integrator is a linear integrator with reset mechanism whose describing function \(\frac{{1.62}}{\omega }\angle - {{38.1}^{^\circ }}\) has magnitude slope equivalent to that of a linear integrator, but with 52° less of phase lag. The potential advantages of using Clegg integrators have been demonstrated in the literature via both simulations and experiments. However, except for describing function analysis, stability criteria specifically tailored to these feedback systems is missing. This paper addresses the internal stability of such control systems and provides stability conditions when the plant is second-order and preliminary results for higher-order cases.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
. J. C. Clegg, “A nonlinear integrator for servomechanism,” Trans A.I.E.E. Part II, 77, pp. 41–42, 1958.
. I. M. Horowitz and P. Rosenbaum, “Nonlinear design for cost of feedback reduction in systems with large parameter uncertainty,” International Journal of Control, vol. 21, pp. 977–1001, 1975.
. Y. Zheng, “Theory and practical considerations in reset control,” Ph.D. Dessertation, University of Massachusetts, Amherst, 1998.
. Y. Zheng, Y. Chait, C. V. Hollot, M. Steinbuch and M. Norg, “Experimental demonstration of reset control design,” University of Massachusetts Technical Report, also submitted for publication, September, 1998.
. H. K. Khalil, Nonlinear Systems, Macmillan, 1992.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1999 Springer-Verlag London
About this chapter
Cite this chapter
Hu, H., Zheng, Y., Hollot, C.V., Chait, Y. (1999). On The Stability of Control Systems Having Clegg Integrators. In: Miller, D.E., Qiu, L. (eds) Topics in Control and its Applications. Springer, London. https://doi.org/10.1007/978-1-4471-0543-5_6
Download citation
DOI: https://doi.org/10.1007/978-1-4471-0543-5_6
Publisher Name: Springer, London
Print ISBN: 978-1-4471-1158-0
Online ISBN: 978-1-4471-0543-5
eBook Packages: Springer Book Archive