
Overview
- Provides novel algorithms for balance control of legged, torque-controlled humanoid robots
- Addresses challenge of multi-contact balancing, which allows a humanoid robot
- Is winner of the George Giralt PhD Award for extraordinary contributions in robotics
Part of the book series: Springer Tracts in Advanced Robotics (STAR, volume 143)
Access this book
Tax calculation will be finalised at checkout
Other ways to access
About this book
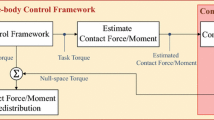
This book aims at providing algorithms for balance control of legged, torque-controlled humanoid robots. A humanoid robot normally uses the feet for locomotion. This paradigm is extended by addressing the challenge of multi-contact balancing, which allows a humanoid robot to exploit an arbitrary number of contacts for support. Using multiple contacts increases the size of the support polygon, which in turn leads to an increased robustness of the stance and to an increased kinematic workspace of the robot. Both are important features for facilitating a transition of humanoid robots from research laboratories to real-world applications, where they are confronted with multiple challenging scenarios, such as climbing stairs and ladders, traversing debris, handling heavy loads, or working in confined spaces. The distribution of forces and torques among the multiple contacts is a challenging aspect of the problem, which arises from the closed kinematic chain given by the robot and its environment.
Similar content being viewed by others


Keywords
Table of contents (10 chapters)
-
Front Matter
-
Back Matter
Authors and Affiliations
Bibliographic Information
Book Title: Whole-Body Control for Multi-Contact Balancing of Humanoid Robots
Book Subtitle: Design and Experiments
Authors: Bernd Henze
Series Title: Springer Tracts in Advanced Robotics
DOI: https://doi.org/10.1007/978-3-030-87212-0
Publisher: Springer Cham
eBook Packages: Intelligent Technologies and Robotics, Intelligent Technologies and Robotics (R0)
Copyright Information: The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Switzerland AG 2022
Hardcover ISBN: 978-3-030-87211-3Published: 04 November 2021
Softcover ISBN: 978-3-030-87214-4Published: 05 November 2022
eBook ISBN: 978-3-030-87212-0Published: 03 November 2021
Series ISSN: 1610-7438
Series E-ISSN: 1610-742X
Edition Number: 1
Number of Pages: XVI, 199
Number of Illustrations: 5 b/w illustrations, 67 illustrations in colour
Topics: Control, Robotics, Mechatronics, Control and Systems Theory, Robotics