
Abstract
This paper is mainly concerned with improved stability criteria for generalized neural networks (GNNs) with time-varying delay by delay-partitioning approach. A newly augmented Lyapunov-Krasovskii functional (LKF) with triple integral terms is constructed by decomposing integral interval, in which the relationships between the augmented state vectors are fully taken into account. The tighter bounding inequalities such as a Wirtinger-based integral inequality, Peng-Park’s integral inequality, and an auxiliary function-based integral inequality are employed to effectively handle the cross-product terms occurred in derivative of the LKF. As a result, less conservative delay-dependent stability criterion can be achieved in terms of \(e_{s}\) and LMIs. Finally, two numerical examples are included to show that the proposed results are less conservative than existing ones.
Similar content being viewed by others

1 Introduction
The generalized neural networks (GNNs) model, which is a combination of local field neural networks (LFNNs) and static neural networks (SNNs), has received increasing attention in recent years, due to the fact that it provides an unified frame for stability analysis of both SNNs and LFNNs [1–6]. It should be mentioned that back-propagation neural networks and optimization type neural networks can be modeled as SNNs, whereas Hopfield neural networks, bidirectional associative memory neural networks, and cellular neural networks can be modeled as LFNNs [6]. Therefore, it is enough to study the stability of GNNs instead of both LFNNs and SNNs. On the other hand, as a source of instability and poor performance, time-delays [7–9] always appear in many neural networks. Thus, stability analysis for delayed neural networks has received considerable attention over the past few decades [2–6, 10–35].
Since the time delays encountered in neural networks are usually not very long [2], delay-dependent criteria which include the information on the size of time delays are always less conservative than the delay-independent ones [2–6, 24–28, 30]. As is well known, the reduction of conservatism in delay-dependent stability criteria can be achieved from an a priori construction of LKF as well as the use of tighter bounding techniques to cope with its derivative. As far as the construction of LKFs is concerned, delay-slope-dependent LKFs [21], discretized LKFs [36], triple/four integral form LKFs [6, 27, 37, 38], delay-partitioning-dependent LKFs [26–28, 39] and augmented LKF [14, 40, 41] have already been introduced to reduce the conservativeness of the derived results. As to techniques for bounding the derivatives of LKFs, Jensen’s inequality [36], free-weighting matrices techniques [42], convex combination techniques [43], reciprocally convex combination (RCC) techniques [44], Peng-Park’s integral inequality [45], a Wirtinger-based integral inequality [30, 46], a free-matrix-based integral inequality [47], auxiliary function-based integral inequalities [48] and Bessel-Legendre integral inequality [49] are all indispensable bounding techniques/inequalities which play a crucial role in reducing the conservatism in delay-dependent stability criteria.
For stability analysis of GNNs with time-varying delay, the delay-dependent stability criteria have become a hot research topic in recent years [1–6]. In [1], delay-independent/-dependent stability criteria have been established by employing the LKF approach for GNNs with interval time-varying delays. Based on constructing a LKF including more information on activation functions and delay upper bounds, [2] has derived less conservative stability criteria for GNNs with two time-varying delay components. With a suitable augmented LKF and modified Wirtinger-based integral inequality, sufficient conditions for guaranteeing the asymptotic stability of the GNNs with time-varying delay are derived in terms of LMIs in [3]. By employing a new LKF and utilizing the free-matrix-based integral inequality [47] to bound the derivative of the LKF, less conservative stability criteria for GNNs with time-varying delay have been derived in [4]. Recently, by proposing an improved integral inequality to handle the cross-product terms occurred in the derivative of the LKF, [5] has achieved less conservative stability criteria for GNNs with interval time-varying delays via delay bi-partitioning method. More recently, by introducing an augmented LKF including triple and four integral terms, [6] has derived an improved delay-dependent stability criterion for GNNs with additive time-varying delays by the reciprocal convex combination technique. However, when revisiting the aforementioned literature, we find that these works still leave plenty of room for improvement because (a) the constructed LKFs do not contain adequate delay-partitioning augmented terms and (b) overbounding techniques are applied to estimate the derivatives of the LKFs, which are the origin of conservatism. As is well known, via a delay-partitioning approach, less and less conservative results can be expected as the fractioning becomes thinner [39]. To the best of the authors’ knowledge, [2, 5, 6] only adopt delay bi-partitioning method to analysis stability of GNNs, which means these results cannot be applied to the case when the delay interval is divided into multiple segments. Therefore, new stability criteria with less conservativeness for delayed GNNs in the frame of multi-partitioning delay approach combining with tighter bounding techniques/inequalities need to be urgently established, which is the main motivation of this paper.
Motivated by the above-mentioned discussion, the main objective of this paper is to develop less conservative stability criteria for GNNs with time-varying delay via tighter bounding inequalities and delay-partitioning approach. The main contributions of this paper are summarized as follows:
-
A newly augmented LKF is established by partitioning the delay in integral terms. And a \([P_{ij}]_{(m+1)\times(m+1)}\)-dependent sub-LKF is included in the augmented LKF, which enables the relationships between the augmented state vectors to be taken into full consideration.
-
A delay-partitioning-dependent triple integral term is included in the augmented LKF for the sake of reducing conservatism.
-
Some tighter bounding inequalities, i.e., the Wirtinger-based integral inequality, Peng-Park’s integral inequality and an auxiliary function-based integral inequality have been, respectively, employed to effectively handle the cross-product terms occurred in derivative of the LKF, which can contribute to less conservative stability criteria.
The rest of this paper is organized as follows. The main problem is formulated in Section 2 and improved stability criteria for the GNNs with time-varying delay are derived in Section 3. In Section 4, two numerical examples are provided; and a concluding remark is given in Section 5.
Notations
Through this paper, \(\mathbb{R}^{n}\) and \(\mathbb {R}^{n\times m} \) denote, respectively, the n-dimensional Euclidean space and the set of all \(n\times m\) real matrices; the notation \(A > ( \ge)\, B\) means that \(A - B\) is positive (semi-positive) definite; I (0) is the identity (zero) matrix with appropriate dimension; \(A^{\mathrm{T}}\) denotes the transpose; \(\operatorname{He}\{A\}\) represents the sum of A and \(A^{\mathrm{T}}\); \(\Vert \bullet \Vert \) denotes the Euclidean norm in \(\mathbb{R}^{n}\); ∗ denotes the elements below the main diagonal of a symmetric block matrix; \(C([ - \tau,0],\mathbb{R}^{n})\) is the family of continuous functions ϕ from interval \([ - \tau,0]\) to \(\mathbb{R}^{n}\) with the norm \(\Vert \phi \Vert _{\tau}= \sup_{ - \tau\le\theta\le0} \Vert {\phi(\theta)} \Vert \); let \(x_{t}(\theta)=x(t+\theta)\), \(\theta\in[ - \tau,0]\).
2 Problem statement and preliminaries
Consider the following GNN with time-varying delay and its equilibrium point being shifted to the origin [1]:
where \(x(\cdot)=[x_{1}(\cdot), x_{2}(\cdot), \ldots, x_{n}(\cdot)]^{\mathrm {T}}\in\mathbb{R}^{n} \) is the neuron state vector; \(f(x(\cdot))=[f_{1}(x_{1}(\cdot)), f_{2}(x_{2}(\cdot)), \ldots, f_{n}(x_{n}(\cdot))]^{\mathrm{T}}\in\mathbb{R}^{n} \) denotes the neuron activation function; \(A=\operatorname{diag}\{a_{1}, a_{2}, \ldots, a_{n}\}\) is a diagonal matrix with \(a_{i}> 0\), \(i=1,2,\ldots,n\). \(W_{0}, W_{1}, W_{2} \in \mathbb{R}^{n \times n}\) are the connection weight matrices between neurons; the initial function for GNN (1) is \(\phi(t)\in C([ - \tau ,0],\mathbb{R}^{n})\); \(\tau(t)\) is a time-varying delay satisfying
where τ and μ are constants.
Assumption 1
([50])
The neuron activation functions \(f_{i}(\cdot)\) (\(i=1,2,\ldots, n\)) are continuous and bounded, and they satisfy
where \(f_{i} (0)=0\), and \(k_{i}^{-}\), \(k_{i}^{+}\) (\(i=1,2,\ldots,n\)) are known real constants.
Remark 1
Assumption 1 on the activation function was originally proposed in [50], and such activation functions could be non-monotonic and more general than the usual sigmoid functions, since \(k_{i}^{-}\) and \(k_{i}^{+}\) may be positive, zero or negative. Furthermore, under Assumption 1, one has [21]:
-
(i)
for GNN (1) and any positive diagonal matrix T,
$$ x^{\mathrm{T}}(t)W_{0}^{\mathrm{T}} K T K W_{0} x(t)-f^{\mathrm{T}}\bigl(W_{0} x(t)\bigr)Tf \bigl(W_{0} x(t)\bigr)\geqslant0, $$(5)where \(K=\operatorname{diag}\{k_{1}, k_{2},\ldots, k_{n}\}\), \(k_{i}=\max\{|k_{i}^{-}|, |k_{i}^{+}|\}\);
-
(ii)
for any \(\alpha,\beta\in R\),
$$ \bigl[\bigl(f_{i} (\alpha) - f_{i} (\beta) \bigr)-k_{i}^{-}(\alpha-\beta)\bigr] \bigl[k_{i}^{+}( \alpha -\beta)-\bigl(f_{i} (\alpha) - f_{i} (\beta)\bigr) \bigr]\geqslant0; $$(6)and letting \(\beta=0\) in (6), it shows that
$$ \bigl[f_{i} (\alpha) -k_{i}^{-} \alpha\bigr] \bigl[k_{i}^{+}\alpha-f_{i} (\alpha) \bigr]\geqslant0,\quad \forall\alpha\in R. $$(7)
Remark 2
It is worth noticing that the GNNs model (1) includes SNNs and LFNNs as its special cases [1]: (i) let \(W_{1} = I\), \(W_{2} = 0\), and \(W_{0} = W\), the GNNs model (1) reduces to the SNNs model; (ii) let \(W_{1} = W\), \(W_{2}= 0\) and \(W_{0} = I\), the GNNs model (1) reduce to the LFNNs model.
Before proceeding, recall the following lemmas which will be used throughout the proofs.
Lemma 1
([16])
For system (1), the following inequalities hold:
Lemma 2
(Wirtinger-based integral inequality [46])
For any matrix \(Z>0\), the following inequality holds for all continuously differentiable functions \(x: [\alpha, \beta] \rightarrow\mathbb{R}^{n}\):
where \(\varpi=[x^{\mathrm{T}}(\beta), x^{\mathrm{T}}(\alpha), \frac {1}{\beta-\alpha}\int_{\alpha}^{\beta}{x}^{\mathrm{T}}(s)\,ds]^{\mathrm {T}}\) and
Remark 3
Corollary 9 in [51] has proofed that the Wirtinger-based integral inequality is equivalent to the free-matrix-based integral inequality proposed in [47]. However, the former involves a much smaller number of unknown variables to be determined than the latter. Therefore, the computational complexity of the application of a Wirtinger-based integral inequality combined with the reciprocally convex approach [44] is less than that of the free-matrix-based integral inequality [51]. In view of the above-mentioned facts, in this paper we adopt the Wirtinger-based integral inequality instead of the free-matrix-based integral inequality to handle the cross-product terms occurred in derivative of the constructed LKF for the sake of reducing the computational complexity.
Lemma 3
(Peng-Park’s integral inequality [45])
For any matrix \(\bigl [ {\scriptsize\begin{matrix}{} Z&S \cr *& Z\end{matrix}} \bigr ]\geq0\), positive scalars τ and \(\tau(t)\) satisfying \(0 < \tau(t)< \tau\), vector function \(\dot{x}:[-\tau,0]\rightarrow\mathbb{R}^{n}\) such that the concerned integrations are well defined, we have
where \(\widetilde{\varpi}(t)=[x^{\mathrm{T}}(t),x^{\mathrm{T}}(t-\tau (t)),x^{\mathrm{T}}(t-\tau)]^{\mathrm{T}}\), and
Lemma 4
For any matrix \(Z \in\mathbb{R}^{n\times n}\), \(Z=Z^{\mathrm{T}}>0\), a scalar \(\tau>0\), and a vector-valued function \(\dot{x}: [-\tau,0]\rightarrow\mathbb{R}^{n}\) such that the following integrations are well defined, we have
where \(\widehat{\varpi}(t)=[x^{\mathrm{T}}(t), \frac{1}{\tau}\int _{t-\tau}^{t}{x}^{\mathrm{T}}(s)\,ds]^{\mathrm{T}}\).
Lemma 5
(Auxiliary function-based integral inequality [48])
Let x be a differentiable function: \([a,b] \rightarrow\mathbb{R}^{n}\). For a symmetric positive matrices \(R \in\mathbb{Z}^{n\times n}\), if the integrals concerned are well defined, then the following inequality holds:
where \(\varpi(a,b)=[x^{\mathrm{T}}(b), \frac{1}{b-a}\int _{a}^{b}{x}^{\mathrm{T}}(s)\,ds, \frac{1}{(b-a)^{2}}\int_{a}^{b}\int_{\theta }^{b}x^{\mathrm{T}}(s)\,ds \,d\theta]^{\mathrm{T}}\), and
Lemma 6
(Finsler’s lemma [53])
Let \(\zeta\in\mathbb{R}^{n}\), \(\Phi=\Phi^{\mathrm{T}}\in\mathbb {R}^{n\times n}\), and \(B \in\mathbb{R}^{m\times n}\) such that \(\operatorname{rank}(B) < n\). Then the following statements are equivalent:
-
(i)
\(\zeta^{\mathrm{T}}\Phi\zeta<0\), \(\forall B\zeta=0\), \(\zeta\neq0\);
-
(ii)
\({B^{\perp}}^{\mathrm{T}}\Phi B^{\perp}<0\);
-
(iii)
\(\exists Y \in\mathbb{R}^{n\times m} \): \(\Phi+\operatorname{He}\{ YB\}<0\),
where \(B^{\perp}\in\mathbb{R}^{n\times(n-\operatorname{rank}(B))}\) is the right orthogonal complement of B.
3 Main results
By a delay-partitioning method, less conservative asymptotic stability criteria for GNN (1) are established in this section.
For any integer \(m\geq1\), define \(\delta=\frac{\tau}{m}\), then \([0,\tau]\) can be divided into m segments, i.e.,
For any \(t\geq0\), there should exist an integer \(k \in\{1,\ldots,m\}\), such that \(\tau(t)\in[(k-1)\delta, k\delta]\).
For notational simplification, let
where \(\zeta_{1}(t)=[x^{\mathrm{T}}(t),x^{\mathrm{T}}(t-\delta),\ldots,x^{\mathrm {T}}(t-(m-1)\delta)]^{\mathrm{T}}\), \(\zeta_{2}(t)=[\frac{1}{\delta}\int_{t-\delta}^{t}x^{\mathrm{T}}(\theta )\,d\theta, \frac{1}{\delta}\int_{t-2\delta}^{t-\delta}x^{\mathrm {T}}(\theta)\,d\theta, \ldots, \frac{1}{\delta}\int_{t-(m-1)\delta }^{t-(m-2)\delta}x^{\mathrm{T}}(\theta)\,d\theta]^{\mathrm{T}}\).
Theorem 1
Given a positive integer m, scalars \(\tau \geq0\), \(\delta=\frac{\tau}{m}\), and μ, diagonal matrices \(K^{-}=\operatorname{diag}\{k_{1}^{-},k_{2}^{-},\ldots,k_{n}^{-}\}\), \(K^{+}=\operatorname{diag}\{ k_{1}^{+},k_{2}^{+},\ldots,k_{n}^{+}\}\), then GNN (1) with a time-varying delay \(\tau(t)\) satisfying (2) and (3) is asymptotically stable if there exist symmetric positive matrices \(P=[P_{ij}]_{(m+1)\times(m+1)}\in\mathbb{R}^{(m+1)n\times(m+1)n}\), \(Z_{0}, V_{0}, Z_{i}, Q_{i}, V_{i} \in\mathbb{R}^{n\times n}\) (\(i=1,\ldots,m\)), \(X_{i}\), \(\hat{X}_{j}\), \(R\in\mathbb{R}^{2n\times2n}\) (\(i=1,\ldots ,m-1\); \(j=1,\ldots,m-2\)), positive diagonal matrices \(\Lambda=\operatorname{diag}\{\lambda_{1},\ldots,\lambda_{n}\}\), \(\hat{\Lambda}=\operatorname{diag}\{\hat{\lambda}_{1},\ldots,\hat{\lambda}_{n}\}\), \(T, T_{l} \in\mathbb {R}^{n\times n}\) (\(l=1,\ldots,7\)), and any matrices \(Y\in\mathbb {R}^{(2m+6)n\times n}\) and \(S_{i}\in\mathbb{R}^{n\times n}\) (\(i=1,\ldots ,m\)), such that the following LMIs hold for \(k=1,\ldots,m\):
where
with
Proof
For any \(t\geq0\), there should exist an integer \(k \in \{1,\ldots,m\}\), such that \(\tau(t)\in[(k-1)\delta, k\delta]\). Then, according to (5) and Lemma 1, choose the following LKF candidate:
where
with \(\eta(t)=[x^{\mathrm{T}}(t),\delta\zeta^{\mathrm{T}}_{2}(t), \int _{t-m\delta}^{t-(m-1)\delta}x^{\mathrm{T}}(\theta)\,d\theta]^{\mathrm {T}}\), \(\eta_{i}(s)=[x^{\mathrm{T}}(s-(i-1)\delta),x^{\mathrm{T}}(s-i\delta )]^{\mathrm{T}}\), \(\hat{\eta}_{i}(s)=[\frac{1}{\delta}\int_{s-i\delta }^{s-(i-1)\delta}x^{\mathrm{T}}(\theta)\,d\theta, \frac{1}{\delta}\int _{s-(i+1)\delta}^{s-i\delta}x^{\mathrm{T}}(\theta)\,d\theta]^{\mathrm {T}}\) and \(W_{0i}\) being the ith row vector of the matrix \(W_{0}\).
Taking the derivative of \(V(x_{t})\) along the solution of GNN (1) yields
where
Applying Lemma 2 and Lemma 3 to bound the second item in (23), then it follows from (13) that
where \(\varpi_{1}(i,t)= [ x^{\mathrm{T}}(t-(i-1)\delta), x^{\mathrm {T}}(t-i\delta), \frac{1}{\delta}\int_{t-i\delta}^{t-(i-1)\delta }x^{\mathrm{T}}(s)\,ds ]^{\mathrm{T}}\), \(\varpi_{2}(k,t)= [x^{\mathrm {T}}(t-(k-1)\delta),x^{\mathrm{T}}(t-\tau(t)),x^{\mathrm{T}}(t-k\delta )]^{\mathrm{T}}\), and \(\Omega(i)\), \(\widehat{\Omega}(k)\) are defined in Theorem 1.
Using Lemma 4 to estimate the integral item \(-\sum_{i=1}^{m}\int _{-i\delta}^{-(i-1)\delta}\int_{t+\theta}^{t-(i-1)\delta} \dot {x}^{\mathrm{T}}(s)V_{i}\dot{x}(s)\,ds\,d\theta\) in (24) yields
where \(\varpi_{3}(i,t)= [x^{\mathrm{T}}(t-(i-1)\delta),\frac {1}{\delta}\int_{t-i\delta}^{t-(i-1)\delta}x^{\mathrm{T}}(\theta)\,d\theta ]^{\mathrm{T}}\) and \(\Theta_{8}\) is defined in Theorem 1.
On the other hand, it follows from Lemma 2 and Lemma 5 that
where \(\varpi_{4}(t)= [x^{\mathrm{T}}(t),x^{\mathrm{T}}(t-\delta),\frac {1}{\delta}\int_{t-\delta}^{t}x^{\mathrm{T}}(s)\,ds ]^{\mathrm{T}}\), \(\varpi_{5}(t)= [x^{\mathrm{T}}(t),\frac{1}{\delta}\int_{t-\delta }^{t}x^{\mathrm{T}}(s)\,ds, \frac{1}{\delta^{2}}\int_{-\delta}^{0}\int _{t+\theta}^{t}x^{\mathrm{T}}(s)\,ds \,d\theta ]^{\mathrm{T}}\), and \(\Omega(0)\), \(\widetilde{\Omega}(0)\) and \(\Theta_{0}\) are defined in Theorem 1.
In addition, for positive diagonal matrices \(T_{l}\) (\(l=1,\ldots,7\)) with appropriate dimensions, the following inequalities hold from (6), (7), and Lemma 1:
which imply
where \(\Theta_{9}\), \(\Theta_{10}\), and \(\Theta_{11}\) are defined in Theorem 1.
Then, by (16)-(28), and the S-procedure, the following inequality holds:
where \(\Theta(k)\) is defined in Theorem 1.
In the following, GNN (1) with the augmented vector \(\zeta (t)\) can be rewritten as
where Γ is defined in Theorem 1.
Therefore, the asymptotic stability conditions for GNN (1) can be represented by
By Finsler’s lemma, for \(Y\in\mathbb{R}^{(2m+6)n\times n}\), (30) is equivalent to
Then, it follows from (29), (30), (31), and LMIs (14) that \(\dot{V}(t,x_{t})|_{\{\tau(t)\in[(k-1)\delta , k\delta]\}}<0\), i.e., \(\dot{V}(t,x_{t})|_{\{\tau(t)\in[(k-1)\delta, k\delta]\}}<-\gamma \Vert x(t)\Vert ^{2} \) for a sufficiently small \(\gamma>0\). Therefore, by the Lyapunov-Krasovskii stability theorem [7], GNN (1) with any delay \(\tau(t)\) satisfying (2) and (3) is globally asymptotically stable. This completes the proof. □
Remark 4
For stability analysis for GNN (1), the modified augmented LKF (15) is quite different from those in [1–5] in the following respects: (a) the augmented LKF with more information as regards the activation functions is established by partitioning the delay in integral terms. And the delay-partitioning-dependent triple integral term \(\sum_{i=1}^{m}\int_{-i\delta}^{-(i-1)\delta}\int_{\theta}^{-(i-1)\delta}\int _{t+\alpha}^{t} \dot{x}^{\mathrm{T}}(s)V_{i}\dot{x}(s)\,ds\,d \alpha \,d\theta\) is also introduced in the LKF; (b) the \([P_{ij}]_{(m+1)\times(m+1)}\)-dependent sub-LKF is included, so the relationships between the augmented state vectors \([x^{\mathrm {T}}(t),x^{\mathrm{T}}(t-\delta),\ldots,x^{\mathrm{T}}(t-m\delta )]^{\mathrm{T}}\) and \([\frac{1}{\delta}\int_{t-\delta}^{t}x^{\mathrm {T}}(s)\,ds,\frac{1}{\delta}\int_{t-2\delta}^{t-\delta}x^{\mathrm {T}}(s)\,ds, \ldots, \frac{1}{\delta}\int_{t-m\delta}^{t-(m-1)\delta }x^{\mathrm{T}}(s)\,ds]^{\mathrm{T}}\) have been fully taken into account. With these differences and advantages, less conservative results than those in [1–5] can be expected, which will be demonstrated later by two numerical examples.
Remark 5
New tighter bounding inequalities such as the Wirtinger-based integral inequality, Peng-Park’s integral inequality, and an auxiliary function-based integral inequality have been, respectively, employed to handle the integral terms \(-\delta \sum_{i=1,i\neq k}^{m} \int_{t-i\delta}^{t-(i-1)\delta} \dot{x}^{\mathrm {T}}(s) Z_{i}\dot{x}(s)\,ds\), \(-\delta\int_{t-k\delta}^{t-(k-1)\delta}\dot {x}^{\mathrm{T}}(s)Z_{k}\dot{x}(s)\,ds\), and \(-\int_{-\delta}^{0}\int _{t+\theta}^{t} \dot{x}^{\mathrm{T}}(s)V_{0}\dot{x}(s)\,ds\,d\theta\), which can reduce the enlargement in bounding the derivative of the LKF. Therefore, less conservative results than existing ones [1–5, 13–15, 17–20, 22, 23, 25, 26, 29] can be achieved. This will be verified by numerical examples later.
Finally, in the case of the time-varying delay \(\tau(t)\) being non-differentiable or unknown \(\dot{\tau}(t)\), the following corollary is readily obtained by setting \(R=T=0\) and \(Q_{k}=0\) (\(Q_{j}\neq0\), \(j=1,\ldots,k-1\)) in Theorem 1.
Corollary 1
Given a positive integer m, scalars \(\tau \geq0\), and \(\delta=\frac{\tau}{m}\), diagonal matrices \(K^{-}=\operatorname{diag}\{k_{1}^{-},k_{2}^{-},\ldots,k_{n}^{-}\}\), \(K^{+}=\operatorname{diag}\{ k_{1}^{+},k_{2}^{+},\ldots,k_{n}^{+}\}\), then GNN (1) with a time-varying delay \(\tau(t)\) satisfying (2) is asymptotically stable if there exist symmetric positive matrices \(P=[P_{ij}]_{(m+1)\times (m+1)}\in\mathbb{R}^{(m+1)n\times(m+1)n}\), \(Z_{0}, V_{0}, Z_{i}, Q_{i}, V_{i} \in \mathbb{R}^{n\times n}\) (\(i=1,\ldots,m\)), \(X_{i}, \hat{X}_{j} \in\mathbb{R}^{2n\times2n}\) (\(i=1,\ldots,m-1\); \(j=1,\ldots ,m-2\)), positive diagonal matrices \(T_{l} \in\mathbb{R}^{n\times n}\) (\(l=1,\ldots,3\)), \(\Lambda=\operatorname{diag}\{\lambda_{1},\ldots,\lambda_{n}\}\), \(\hat{\Lambda}=\operatorname{diag}\{\hat{\lambda}_{1},\ldots,\hat{\lambda}_{n}\}\), and any matrices \(Y\in \mathbb{R}^{(2m+5)n\times n}\) and \(S_{i}\in\mathbb{R}^{n\times n}\) (\(i=1,\ldots,m\)), such that the following LMIs hold for \(k=1,\ldots,m\):
where
with \(\widetilde{\Theta}_{6}(k)= \sum_{i=1}^{k-1} [e_{i+4}Q_{i}e_{i+4}^{\mathrm{T}}- e_{i+5}Q_{i}e_{i+5}^{\mathrm{T}} ]\), and \(\Psi(k)\), Y, Γ, \(\Theta_{i}\), and \(\Theta_{7}(k)\) are, respectively, defined in Theorem 1.
4 Numerical examples
In this section, two examples are introduced to illustrate the merits of the derived results.
Example 1
Consider the delayed GNN (1) subject to (4) with the following parameters:
As a delayed LFNN, the above-mentioned example has been widely studied in [1, 2, 4, 5, 13, 14, 17, 18, 20, 22, 25, 26, 29]. For comparison, the MAUBs (maximum admissible upper bounds) of \(\tau (t)\) derived from Theorem 1 and Corollary 1 with various values of μ and m are summarized in Table 1. As shown in this table, the stability criterion derived in this paper has been improved by comparing with previous ones [1, 2, 4, 5, 13, 17, 20, 22, 25, 26, 29]. For the initial state condition \([-1,0.3,-0.4,1]^{\mathrm{T}}\), \(\mu=0.5\), and \(\tau=3.92\), Figure 1 depicts the state trajectories of the given LFNNs with activation functions \(f_{1}(s)=0.0568(|s+1|-|s-1|)\), \(f_{2}(s)=0.0640(|s+1|-|s-1|)\), \(f_{3}(s)=0.3997(|s+1|-|s-1|)\), \(f_{4}(s)=0.1184(|s+1|-|s-1|) \) and time-varying delay \(\tau (t)=1.96(1-\sin(0.254t))\). Figure 1 shows that the MAUBs listed in Table 2 are capable of guaranteeing asymptotical stability of the considered LFNNs with the given parameters.

The state responses of the given LFNNs in Example 1 .
Example 2
Consider the delayed GNN (1) subject to (4) with the following parameters:
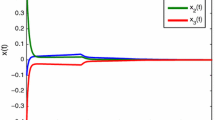
As a delayed SNN, the above-mentioned example has been widely studied in previous works [3, 4, 15, 19, 23]. For comparison, with different μ and m, the MAUBs of \(\tau(t)\) derived from [3, 4, 15, 19] and Theorem 1 proposed in this paper are summarized in Table 2. It can also be concluded from Table 2 that the results proposed in this paper are less conservative than those in [3, 4, 15, 19]. For initial state condition \([-1,1,0.4]^{\mathrm{T}}\), \(\mu=0.1\), and \(\tau=1.12\), Figure 2 depicts the state trajectories of the given SNN with activation functions \(f_{1}(s)=0.1840(|s+1|-|s-1|)\), \(f_{2}(s)=0.0897(|s+1|-|s-1|)\), \(f_{3}(s)=0.1438(|s+1|-|s-1|)\) and time-varying delay \(\tau(t) =0.56(1-\sin (0.178t))\). Figure 2 also shows that the MAUBs listed in Table 2 are capable of guaranteeing asymptotical stability of the considered SNNs with the given parameters.

The state responses of the SNNs in Example 2 .
From the two aforementioned examples, it is also concluded from Tables 1 and 2 that the conservatism is gradually reduced with the increase of delay-partitioning number m. However, as m increases, testing the proposed results is much time-consuming since the more numbers of LMIs and LMI scalar decision variables are included in the corresponding criterion. So, one can choose the appropriate m for a tradeoff between the better results and the computational efficiency [45].
5 Conclusions
Combining delay-partitioning approach with tighter bounding inequalities, this paper develops further less conservative stability criteria for GNNs with time-varying delay. A newly augmented LKF with triple integral terms is established by partitioning the delay in integral terms. The \([P_{ij}]_{(m+1)\times(m+1)}\)-dependent sub-LKF is also introduced so as to take full consideration of the relationships between the augmented state vectors. Less conservative delay-dependent stability criteria have been established in terms of \(e_{s}\) and LMIs by utilizing a Wirtinger-based integral inequality, Peng-Park’s integral inequality, and an auxiliary function-based integral inequality to effectively handle the cross-product terms appearing in derivative of the LKF. Finally, two numerical examples are provided to demonstrate the less conservatism and effectiveness of the proposed results.
References
Zhang, XM, Han, QL: Global asymptotic stability for a class of generalized neural networks with interval time-varying delays. IEEE Trans. Neural Netw. 22(8), 1180-1192 (2011)
Zhang, CK, He, Y, Jiang, L, Wu, QH, Wu, M: Delay-dependent stability criteria for generalized neural networks with two delay components. IEEE Trans. Neural Netw. Learn. Syst. 25, 1263-1276 (2014)
Park, MJ, Kwon, OM, Cha, EJ: On stability analysis for generalized neural networks with time-varying delays. Math. Probl. Eng. 2015(7), 1-11 (2015)
Zeng, HB, He, Y, Wu, M, **ao, SP: Stability analysis of generalized neural networks with time-varying delays via a new integral inequality. Neurocomputing 161, 148-154 (2015)
Liu, YJ, Lee, SM, Kwon, OM, Park, JH: New approach to stability criteria for generalized neural networks with interval time-varying delays. Neurocomputing 149, 1544-1551 (2015)
Rakkiyappan, R, Sivasamy, R, Park, JH, Lee, TH: An improved stability criterion for generalized neural networks with additive time-varying delays. Neurocomputing 171, 615-624 (2016)
Hale, J: Theory of Functional Differential Equation. Springer, New York (1977)
Lu, R, Wu, H, Bai, J: New delay-dependent robust stability criteria for uncertain neutral systems with mixed delays. J. Franklin Inst. 351(3), 1386-1399 (2014)
Zhang, D, Cai, WJ, **e, LH, Wang, QG: Non-fragile distributed filtering for T-S fuzzy systems in sensor networks. IEEE Trans. Fuzzy Syst. 23(5), 1883-1890 (2015)
He, Y, Wu, M, She, JH: An improved global asymptotic stability criterion for delayed cellular neural networks. IEEE Trans. Neural Netw. 17(1), 250-252 (2006)
Lam, J, Xu, S, Ho, DWC, Zou, Q: On global asymptotic stability for a class of delayed neural networks. Int. J. Circuit Theory Appl. 40(11), 1165-1174 (2012)
Zeng, Z, Huang, T, Zheng, W: Multistability of recurrent neural networks with time-varying delays and the piecewise linear activation function. IEEE Trans. Neural Netw. 21(8), 1371-1377 (2010)
He, Y, Liu, GP, Rees, D, Wu, M: Stability analysis for neural networks with time-varying interval delay. IEEE Trans. Neural Netw. 18, 1850-1854 (2007)
Li, T, Guo, L, Sun, C, Lin, C: Further results on delay-dependent stability criteria of neural networks with time-varying delays. IEEE Trans. Neural Netw. 19, 726-730 (2008)
Shao, HY: Delay-dependent stability for recurrent neural networks with time-varying delays. IEEE Trans. Neural Netw. 19, 1647-1651 (2008)
Zhu, X, Wang, Y: Delay-dependent exponential stability for neural networks with discrete and distributed time-varying delays. Phys. Lett. A 373, 4066-4072 (2009)
**ao, SP, Zhang, XM: New globally asymptotic stability criteria for delayed cellular neural networks. IEEE Trans. Circuits Syst. II 56, 659-663 (2009)
Zhang, XM, Han, QL: New Lyapunov-Krasovskii functionals for global asymptotic stability of delayed neural networks. IEEE Trans. Neural Netw. 20, 533-539 (2009)
Zuo, Z, Yang, C, Wang, Y: A new method for stability analysis of recurrent neural networks with interval time-varying delay. IEEE Trans. Neural Netw. 21, 339-344 (2010)
Zhang, H, Liu, Z, Huang, GB, Wang, Z: Novel weighting-delay-based stability criteria for recurrent neural networks with time-varying delay. IEEE Trans. Neural Netw. 21, 91-106 (2010)
Li, T, Zheng, WX, Lin, C: Delay-slope-dependent stability results of recurrent neural networks. IEEE Trans. Neural Netw. 22(12), 2138-2143 (2011)
Zeng, HB, He, Y, Wu, M, Zhang, CF: Complete delay-decomposing approach to asymptotic stability for neural networks with time-varying delays. IEEE Trans. Neural Netw. 22, 806-812 (2011)
Li, X, Gao, H, Yu, X: A unified approach to the stability of generalized static neural networks with linear fractional. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 41, 1275-1286 (2011)
Zhang, H, Yang, F, Liu, X, Zhang, Q: Stability analysis for neural networks with time-varying delay based on quadratic convex combination. IEEE Trans. Neural Netw. Learn. Syst. 24, 513-521 (2013)
Ge, C, Hua, C, Guan, X: New delay-dependent stability criteria for neural networks with time-varying delay using delay-decomposition approach. IEEE Trans. Neural Netw. Learn. Syst. 25, 1378-1383 (2014)
Tian, JK, **ong, WJ, Xu, F: Improved delay-partitioning method to stability analysis for neural networks with discrete and distributed time-varying delays. Appl. Math. Comput. 233, 152-164 (2014)
Lakshmanan, S, Park, JH, Jung, HY, Kwon, OM, Rakkiyappan, R: A delay partitioning approach to delay-dependent stability analysis for neutral type neural networks with discrete and distributed delays. Neurocomputing 111, 81-89 (2013)
Mathiyalagan, K, Park, JH, Sakthivel, R, Marshal Anthoni, S: Delay fractioning approach to robust exponential stability of fuzzy Cohen-Grossberg neural networks. Appl. Math. Comput. 230, 451-463 (2014)
Shi, KB, Zhong, SM, Zhu, H, Liu, XZ, Zeng, Y: New delay-dependent stability criteria for neutral-type neural networks with mixed random time-varying delays. Neurocomputing 168(30), 896-907 (2015)
Zeng, HB, Park, JH, Zhanga, CF, Wang, W: Stability and dissipativity analysis of static neural networks with interval time-varying delay. J. Franklin Inst. 352(3), 1284-1295 (2015)
Liu, Y, Lee, SM, Lee, HG: Robust delay-dependent stability criteria for uncertain neural networks with two additive time-varying delay components. Neurocomputing 151, 770-775 (2015)
Cheng, J, Zhong, S, Zhong, Q, Zhu, H, Du, Y: Finite-time boundedness of state estimation for neural networks with time-varying delays. Neurocomputing 129, 257-264 (2014)
Zeng, HB, He, Y, Wu, M, She, J: New results on stability analysis for systems with discrete distributed delay. Automatica 60(10), 189-192 (2015)
Zeng, HB, He, Y, Shi, P, Wu, M, **ao, SP: Dissipativity analysis of neural networks with time-varying delays. Neurocomputing 168, 741-746 (2015)
Zeng, HB, Park, JH, **a, JW: Further results on dissipativity analysis of neural networks with time-varying delay and randomly occurring uncertainties. Nonlinear Dyn. 79(1), 83-91 (2015)
Gu, K: A further refinement of discretized Lyapunov functional method for the stability of time-delay systems. Int. J. Control 74(10), 967-976 (2001)
Ariba, Y, Gouaisbaut, F: An augmented model for robust stability analysis of time-varying delay systems. Int. J. Control 82(9), 1616-1626 (2009)
Li, T, Wang, T, Song, A, Fei, S: Combined convex technique on delay-dependent stability for delayed neural networks. IEEE Trans. Neural Netw. Learn. Syst. 24, 1459-1466 (2013)
Gouaisbaut, F, Peaucelle, D: Delay-dependent stability analysis of linear time delay systems. In: IFAC Workshop on Time Delay Systems (2006)
Li, T, Ye, XL: Improved stability criteria of neural networks with time-varying delays: an augmented LKF approach. Neurocomputing 73, 1038-1047 (2010)
Kwon, OM, Park, JH, Lee, SM, Cha, EJ: New augmented Lyapunov-Krasovskii functional approach to stability analysis of neural networks with time-varying delays. Nonlinear Dyn. 76(1), 221-236 (2014)
He, Y, Liu, GP, Rees, D, Wu, M: Stability analysis for neural networks with time-varying interval delay. IEEE Trans. Neural Netw. 18(6), 1850-1854 (2007)
Park, P, Ko, JW: Stability and robust stability for systems with a time-varying delay. Automatica 43(10), 1855-1858 (2007)
Park, PG, Ko, JW, Jeong, CK: Reciprocally convex approach to stability of systems with time-varying delays. Automatica 47, 235-238 (2011)
Peng, C, Fei, MR: An improved result on the stability of uncertain T-S fuzzy systems with interval time-varying delay. Fuzzy Sets Syst. 212, 97-109 (2013)
Seuret, A, Gouaisbaut, F: Wirtinger-based integral inequality: application to time-delay systems. Automatica 49(9), 2860-2866 (2013)
Zeng, HB, He, Y, Wu, M, She, J: Free-matrix-based integral inequality for stability analysis of systems with time-varying delay. IEEE Trans. Autom. Control 60(10), 2768-2772 (2015)
Park, PG, Lee, W, Lee, SY: Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. J. Franklin Inst. 352, 1378-1396 (2015)
Seuret, A, Gouaisbaut, F: Hierarchy of LMI conditions for the stability analysis of time-delay systems. Syst. Control Lett. 81, 1-7 (2015)
Liu, Y, Wang, Z, Liu, X: Global exponential stability of generalized recurrent neural networks with discrete and distributed delays. Neural Netw. 19, 667-675 (2006)
Gyurkovics, É: A note on Wirtinger-type integral inequalities for time-delay systems. Automatica 61, 44-46 (2015)
Balasubramaniam, P, Krishnasamy, R, Rakkiyappan, R: Delay-dependent stability of neutral systems with time-varying delays using delay-decomposition approach. Appl. Math. Model. 36, 2253-2261 (2012)
de Oliveira, MC, Skelton, RE: Stability tests for constrained linear systems. In: Perspectives in Robust Control, pp. 241-257. Springer, Berlin (2001)
Acknowledgements
The authors would like to thank the anonymous reviewers for their constructive comments that have greatly improved the quality of this paper. This work was partially supported by the National Natural Science Foundation of China (Grant nos. 11501390 and 11501392), the Key Natural Science Foundation of Sichuan Province Education Department (Grant no. 15ZA0234) and the Opening Project of Sichuan Province University Key Laboratory of Bridge Non-destruction Detecting and Engineering Computing (Grant nos. 2014QZJ02 and 2015QZJ02).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Chen, ZW., Yang, J. & Luo, WP. Improved stability criteria for generalized neural networks with time-varying delay by auxiliary function-based integral inequality. Adv Differ Equ 2016, 204 (2016). https://doi.org/10.1186/s13662-016-0922-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0922-3