
Abstract
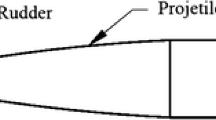
Guided munition is composed of a highly rotating main body and a guidance/control fuze with two pairs of control canards. The guidance/control fuze rotates in an opposite direction at a slower rate than the main body. The first pair of canards, called pitch canards, is used as the pitch and yaw attitude control effector, and the second pair, called spin canards, is used to generate the rotation of the fuze. Due to the highly rotating motion of the munition, the cross coupling effect between the pitch and yaw axes is significant. To decouple the pitch and yaw axes, the neural network-based L1 adaptive control with dynamic model inversion is proposed in this paper. We also present a coordinate transformation for the controller of the rotating guided munition. The 7 DOF nonlinear simulation model was conducted to validate the results of the controller.











Similar content being viewed by others

References
Fresconi F, Plostins P (2010) Control mechanism strategies for spin-stabilized projectiles. Proc Inst Mech Eng Part G J Aerosp Eng 224:979–991
Ollerenshaw D, Costello M (2008) On the swerve response of projectiles to control input. US Army Research Laboratory report ARL-CR-0604, April 2008
Frost G, Costello M (2006) Control authority of a projectile equipped with an internal unbalanced. Part J Dyn Syst Meas Control 128:1005–1012
Corriveau D, Berner C, Fleck V (2007) Trajectory correction using impulse thrusters for conventional artillery projectiles. In: Proceedings of the 23rd international symposium on Ballistics, Tarragona, Spain, pp 639–646
Ilg MD (2008) Guidance, navigation, and control for munitions. Ph.D. Thesis, Drexel University
Ollerenshaw D, Costello M (2008) Model predictive control of a direct fire projectile equipped with canards. J Dyn Syst Meas Control 130:061010
Brinker JS, Wise KA (1996) Stability and flying qualities robustness of a dynamic inversion aircraft control law. J Guid Control Dyn 19:1270–1277
Hovakimyan N, Nardi F, Calise AJ, Lee H (2001) Adaptive output feedback of a class of nonlinear systems. Internat J Control 74:1161–1169
Johnson EN, Kannan SK (2002) Adaptive flight control for an autonomous unmanned helicopter. In: AIAA guidance, navigation and control conference, AIAA-2002-4439, Monterey, CA
Prasad JVR, Calise AJ (1999) Adaptive nonlinear controller synthesis and flight evaluation on an unmanned helicopter. IEEE Int Conf Control Appl 1:137–142
Han K, Sung J, Kim BS (2009) An adaptive autopilot design and stability margin evaluation for an anti-ship missile. In: Asia-Pacific international symposium on aerospace technology, pp 15–19
Kim N, Yoo CS, Kang YS (2008) L1 adaptive controller augmented with feedback linearization. J Korean Soc Aeronaut Sp Sci 36:525–624
Kim BS, Calise AJ (1997) Nonlinear flight control using neural networks. J Guid Control Dyn 20:26–33
Kim BS (1994) Nonlinear flight control using neural networks. Ph.D. Thesis, the School of Aerospace Engineering, Georgia Institute of Technology
Costello M, Peterson A (2000) Linear theory of a dual-spin projectile in atmospheric flight. Army Research Laboratory, Adelphi
Acknowledgements
This research was supported by the ADD (Agency for Defense Development) under the contract and The BK 21 plus by the Ministry of Education.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix 1
Appendix 1
Notation
\( m_{\text{s}} ,m_{\text{f}} \) | Mass of shell and fuze |
\( \bar{F} \) | Force vector |
\( \bar{\omega }_{\text{NR}} \) | Angular velocity in no-roll axis |
\( u,v,w \) | Velocity component in body axis |
\( L_{\text{v}} ,L_{\text{b}} \) | Roll moment of viscosity friction and roll brake |
\( B \) | Coefficient of viscosity friction |
\( p_{\text{s}} ,p_{\text{f}} \) | Shell and fuze angular velocity |
\( L,M,N \) | Moment component |
\( I_{xx,yy,zz} \) | Moment of inertia |
\( A_{y}^{B} ,A_{z}^{B} \) | Side, normal acceleration in body axis |
\( A_{y0} ,A_{z0} \) | Initial value of side, normal acceleration |
\( \delta_{y}^{\text{B}} ,\delta_{z}^{\text{B}} \) | Deflection angles of yaw and pitch effectors in body axis, respectively |
\( \delta_{0} \) | Initial value of control effector |
\( p_{0} \) | Initial value of angular velocity in x axis |
\( t \) | Flight time |
\( \phi_{A} ,\phi_{\delta } \) | Phase of state and input |
\( A_{y}^{\text{NR}} ,A_{z}^{\text{NR}} \) | Side, normal acceleration in no-roll axis |
\( A_{y}^{\text{m}} ,A_{z}^{\text{m}} \) | Side, normal acceleration in maneuver axis |
\( x_{\text{c}} \) | Command of angular velocity |
\( \delta_{\text{p}} ,\delta_{\text{y}} \) | Pitch and yaw control effector |
\( v \) | Pseudo control signal |
\( v_{\text{ad}} \) | Neural network signals |
\( \Delta \) | Modeling error |
\( W \) | Unknown weighting vector of the neural network law |
\( \hat{W} \) | Designed weighting vector of the neural network law |
\( \hat{A} \) | Error model state matrix |
\( \sigma \) | Sigma–pi basis function |
\( f(x) \) | Nonlinear system model |
\( K \) | Feedback gain matrix |
\( e \) | State of error model |
Rights and permissions
About this article

Cite this article
Sung, J., Kim, B.S. & Song, M.S. Neural Network-Based Adaptive Control Design of Dual-Spin Projectile with Rotating Canards. Int. J. Aeronaut. Space Sci. 20, 806–814 (2019). https://doi.org/10.1007/s42405-019-00162-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42405-019-00162-9