
Abstract
Due to its complex nature, Coronavirus has perplexed many researchers worldwide and endangered the lives of people across the globe forcing them to take social distancing and close geographical borders in order to control the spread of the disease. This study, therefore, seeks to develop a new mathematical model which delineates the dynamics of COVID-19. This latter takes into account the common characteristics that typify not only this disease as well as the infectious undetected cases, but also the ones under medical treatment. Thus we maintain that the more infected people are figured out and treated, the better we prevent the spread of Covid-19. In this paper, we study a stochastic epidemic model of Covid-19 with quarantine alone or in combination with treatment measures. Firstly, we establish the existence and uniqueness of the global positive solution to the proposed model. Secondly, we establish conditions for extinction and persistence in mean. Finally, to put on validation of the theorical results we present some numerical simulations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The World Health Organization (WHO) officially declared the global outbreak of an infectious respiratory disease called CORONA Virus on January 9th, 2020. Due to its complex nature, COVID-19 has proved to be one of the most contagious diseases over history. For this reason, WHO designated the 2019-nCoV virus as sixth Public Health Emergency of International Concern on January 30th. It started in China and went viral all over the corners of the world engendering many global deaths. In an attempt to stop its rapid spread, many researchers worldwide have invested lots of efforts in order to come up with a suitable medical treatment. Besides, a lot of research endeavours have been conducted to better understand its origin, and how it functions so as to stop its expansion. Yet, the most effective preventive measures adopted so far include large-scale quarantine, good hygiene, social distancing, and closing borders. These control measures have drastically influenced the social and economic structure worldwide. The quarantine of the infected individuals with medical follow-up and suitable treatment are so far deemed the most effective intervention to prevent the expansion of COVID-19 and lower the transmission rates. It is worth-noting to take into consideration the fact that the infection, as some observational studies and modeling work have shown, can be asymptomatic or paucisymptomatic (presenting few symptoms) in 30–\(60\%\) of infected subjects, in particular in young children (less than 12 years old) ([8]). These cases of infected individuals are sometimes not detected, and therefore they may infect other individuals owing to being not quarantined. Such cases do accelerate the spread of the disease among people and ignite the dynamics of the evolution of COVID-19. Hence, it turns out that Coronavirus does not stop spreading, or rather causing a high a high percentage of deaths across the globe. In addition, the newly detected virus strains, which seem more contagious, have led several countries to launch vaccination campaigns to counter the rise of the pandemic after the announcement of the development of some effective vaccines against COVID-19. Knowledge on the dynamics of this pandemic is crucial in getting a full understanding about the duration and peaks of its outbreak. This fact led many scholars worldwide to develop mathematical models of the COVID-19 outbreak. Our suggested model comprises six compartments, namely susceptible, infected symptomatic, infected asymptomatic, quarantined individuals without any treatment or medical monitoring, quarantined individuals, but under treatment and medical supervision, and recovered for the spread of the Coronavirus disease 2019 (COVID-19).
For a better control of the spread of various contagious diseases, treatment is no doubt considered to be an effective method. Besides, time plays an important role in the efficiency of treatment. In case the infected individuals do not receive a prompt treatment, they can be exceedingly affected. Thus they put their lives at risk.
The spread of contagious diseases among people and the rate of transmission is something worthy of exploration. It has been explored by a number of authors in various epidemic models. In fact, researchers in this field consider different types of incidence rate and the linear or nonlinear treatment function depending on the nature of disease spreading. To include the behavioral change and increased effect of infected individuals, the saturated incidence rate \(\frac{\beta S I}{1+ I}\) was introduced by Anderson and May in 1978 [1], where is defined as inhibitory coefficient. Capasso and Serio [3] studied the suppression effect of the healthy population’s behavioral change and the cluster effect of the infected individuals. This study concluded that treatment is an important method towards epidemic control. In the same line of thought, Wang and Ruan highlighted the importance of treatment as a means to better control diseases. Likewise, Zhang and Liu [18] introduced a continuously differentiable treatment function: T(I) of the form \(T(I)= \frac{\beta r I}{1+ I}\) to characterize the saturation phenomenon of the limited medical resources where T(I) is an increasing function of I and \(\frac{r}{\alpha }\) is the maximal supply of medical resources per unit time. This treatment function proves its efficacy against the eruption of diseases like SARS and others, especially at the very beginning of their outbreak characterized by a sheer absence of real and effective treatment resources for the infected individuals. In our case, the quarantined individuals under treatment and medical care will undergo a treatment that would allow us to introduce the treatment function \(\frac{\theta _1 Q_u }{1+\theta _2Q_u}\). This treatment function applied in our proposed model when \(Q_u\) is very low, the proposed treatment function approaches to a value near-zero and for a large value of \(Q_u\), it approaches to a finite limit. This type of treatment function would reflect the natural epidemic system and take into account the complexities of the infected individuals who are delayed for treatment and this would inevitably exert a significant influence on the spread of the disease. In the light of the above-stated points, the current study seeks to explore the treatment effects on the spreading of the COVID-19. The dynamics of the proposed model with saturated incidence rate and saturated treatment function are explored in this paper. The remaining part of this paper is delineated as follows: In the next section, we propose a stochastic epidemic model for the transmission dynamics of the COVID-19 to describe the changing of its behavior by drawing on the characteristics of this pandemic and improving the recommended model in (2). Subsequently, Sect. 3 starts off with the proof of the existence and uniqueness of a global positive solution of the proposed model, then we will give sufficient conditions for extinction and persistence in mean of the disease. Finally, in the last section we perform numerical simulations using the Euler Maruyama method and with the help of Matlab software to confirm the theoretical results obtained.
2 Mathematical formulation of the model
In this section, we describe the proposed model. First, we present the epidemiological characteristics of COVID-19. Second, we introduce a general and a detailed description of our approach. Finally, we go into detail about some of the model outputs that will be used for the numerical experiments performed later.
2.1 Epidemiological characteristics of COVID-19 and general description
Epidemic modeling is nowadays a powerful tool for investigating human infectious diseases, such as Ebola and SARS. It contributes to the understanding of the dynamics of the virus, and provides useful predictions about its potential transmission. It also helps in implementing effective control measures which can provide valuable information for public health policy makers.
Although all the Corona viruses have the ability to infect humans and develop severe respiratory syndrome, the novel virus seems distinct from other Corona viruses such as SARS, MERS, and Influenza. More or less, it is closely linked to the SARS virus. Because the number of confirmed infections of COVID-19 is higher than the total number of suspected SARS cases, the novel Corona virus is assumed to be more contagious than SARS with respect to community spread and severity. On April 2, 2020, WHO provided a brief overview of the specificities pertaining to the COVID-19 virus transmission. It has been reported that COVID-19 has been primarily transmitted from symptomatic people by direct contact or close contact through respiratory droplets, or by indirect contact with contaminated objects and surfaces. Besides, the virus was claimed to remain viable and infectious for hours in air and for days on surfaces.
Among the complex characteristics that distinguish COVID-19 from other respiratory viral infections are the transmission factor from a large group of asymptomatic individuals and the incubation period from the onset of symptoms to the first clinical visit for COVID-19. Overall, the novel Corona virus is infectious during the incubation period when no symptoms are shown in patients; an important feature typifying COVID-19. We assume that it is difficult to detect people carrying the virus because of the screening method adopted or the existence of people infected and not showing any symptoms. Therefore, In the absence of proper treatment, many force-control policies namely home isolation, hospital quarantine, physical distancing, and personal hygiene are critical and need to be emphasized and enforced further to reduce the risk of SARS-CoV-2 transmission.
COVID-19 is not only a massive health emergency, but also a human development crisis that generates a worldwide emergency situation. An issue that is as complex as COVID-19 needs a model that takes into account its complex specificities.
2.2 The mathematical model
Mathematical modeling, particularly in terms of differential equations, is a strong tool to study the new SARS-COV epidemic. Thus, several studies have been devoted to modelling and investigating this new epidemic (for example [2, 4, 12, 15, 20]). The major challenge for the control of the epidemic is the presence of asymptomatic cases and the quarantine of symptomatic cases under treatment and also the taking of containment measures for the majority of the population (travel and movement restrictions, etc.). Especially since, infected cases are not quickly detected because of the incubation period of the disease which can last a few days and also because of the difficulty of testing a large number of suspected cases and the measures taken to know the infected cases. hus, the strategy adopted to increase the measure of isolation and placing infected cases in quarantine and under medical supervision leads to slowing down the spread of the disease. In this sense, various mathematical models have been recently proposed to model and study the spread of Covid-19 (for instance [6, 14, 17, 19, 20]). On our part, to study the dynamics of the infectious disease of the COVID-19, we propose a new epidemiological compartment model that takes into account the super-spreading phenomenon of some individuals. We divide the whole population into six classes which are S(t), \(I_s(t)\), \(I_a(t)\), \(Q_w(t)\), \(Q_u(t)\) and R(t) which respectively stand for susceptible cases, infected symptomatic cases, infected asymptomatic (confirmed and un-quarantined), quarantined cases without any treatment and medical monitoring and quarantined individuals but under treatment and medical supervision, and finally the recovered cases. In this paper, a quarantine model is developed for different stages of COVID-19 and in which we distinguish two types of the quarantine of individuals:
-
(1)
quarantined individuals without any treatment and medical monitoring, who will be usually isolted in their home; this refers to the restriction of movement or separation of healthy people who are susceptible or possibly exposed to a contagious disease who are not subject to any treatment or medical monitoring, before it is known whether they will be ill.
-
(2)
quarantined individuals under treatment and medical supervision refers to the separation and restricted movement of ill people who have a contagious disease in order to prevent its transmission to others. It typically occurs in a hospital setting, but may be done under very special cases at home under a special facility.
Our model is an ad hoc compartmental model of the COVID-19, taking into account its particularities. A flowchart of model is presented in Fig. 1.

Transfer diagram of the model (1)
The dynamic disease spread is modeled by using the following deterministic system for the model
Six variables related to the features are used to model the flows of people between four possible states:
-
S(t) the number of susceptible individuals, \(I_s(t)\) the number of infected symptomatic and un-quarantined individuals,
-
\(I_a(t)\) the number of infected asymptomatic and un-quarantined individuals,
-
\(Q_w (t)\) represents the number of quarantined individuals without any treatment and medical monitoring,
-
\(Q_u (t)\) represents the number of quarantined individuals but under treatment and medical supervision,
-
R(t) represents the number of recovered individuals.
Let \(N=S+I_s+I_a+Q_w+Q_u+R\) be the total population in the model. The parameters of system are positive constants where: \(\varLambda\) is the input rate corresponding to birth and immigration. \(\mu\) the death rate, \(\beta _1\) and \(\beta _2\) denote the infection transmission coefficients, \(\lambda _1\) indicates the treatment cure rate of the disease caused by virus and \(\lambda _2\) represents the recovery rate of the disease caused by virus. Through treatment, the quarantined individuals under treatment recover at a saturated treatment function \(-\frac{\theta _1 Q_u }{1+\theta _2 Q_u}\), where \(\theta _1> 0\), \(\theta _2> 0\). \(\theta _1\) is the cure rate and \(\theta _2\) represents the extent to which the infected effect delays the treatment.
For the proposed model, we can define the basic reproduction number as: \(\mathcal {R}_1 = \frac{\beta _1 \varLambda }{ \mu (\mu + \lambda _1 + \gamma _1) }\) and \(\mathcal {R}_2 =\frac{ \beta _2 \varLambda }{ \mu ( \mu + \lambda _2 + \gamma _2) } .\)
These latter parameters give the average of new infections caused by a single infected individual in a whole susceptible population.
The rates and patterns of contact between individuals are very important factors for understanding and estimating contacts for simulating the dynamics of a contagious disease and can influence the control of the dynamics of the disease, certainly there are various factors influencing the significant increase or not of the incidence of diseases which depend for example on the transmission of pathogens or on climatic and seasonal conditions... which prompted us to take into account the effect of randomly fluctuating environment, thus we replace the contact rate \(\beta _i, \, i=1,2\) in system (1) by \(\beta _i \rightarrow \beta _i + \sigma _1 dB_i, \, i=1,2\) where \(B_i(t), \, i=1,2\) are independent Brownian motions defined on a complete probability space \((\varOmega , \mathcal {F}, \mathcal {P})\) with a natural filtration \(\{\mathcal {F}_t \}_{t \ge 0}\), and \(\sigma _1^2, \, i=1,2\) are the intensities of white noise. Hence, the stochastic model is described by
Throughout this paper, we will use the following notations. \(\mathbb {R}^d\) denotes the d-dimensional Euclidean space, and |x| denotes the Euclidean norm of a vector x and \(\mathbb {R}_+^d\) denote the positive cone in \(\mathbb {R}^d,\) i.e., \(\mathbb {R}_+^d=\{x\in \mathbb {R}^d:\, x_i>0, i=1,\,2\dots ,\,d\}.\)
We define a d-dimensional stochastic differential equation (SDE)
where the map**s \(F:\mathbb {R}^d \rightarrow [t_0;+\infty [ \times \mathbb {R}^d\), \(G:[t_0;+\infty [ \times \mathbb {R}^d \rightarrow \mathcal {M}_{d,m}(\mathbb {R})\), et B(t) is an d-dimensional Wiener process Brownian motion defined on the probability space \((\varOmega , \mathcal {F}, \mathcal {P})\) with the filtration \(\{\mathcal {F}_{t} \}_{t\ge 0}\) satisfying the usual condition.
Define the differential operator \(L\) associated with Eq. (3) by
\(\displaystyle L = \frac{\partial }{\partial t} + \sum _{i=1}^d F_i(t,X) \frac{\partial }{\partial X_i} +\dfrac{1}{2}\sum _{i,j=1}^d \left[ G^T(t,X)G(t,X)\right] _{ij} \frac{\partial ^2}{\partial X_i \partial X_j}.\)
Let \(S_h = \{ x \in \mathbb {R}^d: \,| x | < h \}\). If \(L\) acts on a function \(V \in C^{1,2}(\mathbb {R}^+ \times S_h; \mathbb {R}^+)\), then:
By Itô’s formula, if \(X(t) \in S_h\):
where:
3 Dynamics of stochastic system (2)
In this section, we will first prove the existence and uniqueness of the global positive solution of the stochastic system (2) and then we will give sufficient conditions for extinction and persistence in mean of the disease.
3.1 Existence and uniqueness of the global positive solution
In order to investigate the dynamical behavior, we will initially demonstrate that the solution is global existence. Next, we will show that there is a unique global and positive solution of model (2) to ensure that the solution does not explode in a finite time, so by using Lyapunov analysis method (mentioned in [10]).
We need to define the subset
where \(N(t)=S(t)+{I_a(t)+ I_s(t)}+ Q_u(t)+Q_w(t)+ R(t)\)
Remark 1
The total population N(t) in system (2) verifies, the equation
By solving the above differential inequality ve get
If \(( S(0),I_a(0), I_s(0), Q_u(0), Q_w(0), R(0)) \in \varGamma\) then \(N(t) \le \frac{\varLambda }{\mu }\) a.s. Thus, the set \(\varGamma\) is almost surely positively invariant by the system (2), throughout the rest, we assume that \(( S(0),I_a(0), I_s(0), Q_u(0), Q_w(0), R(0)) \in \varGamma.\)
By using Lyapunov analysis method, we shall show that the solution of system (2) is positive and global. Then this solution remains in \(\varGamma\) for all \(( S(0),I_a(0), I_s(0), Q_u(0), Q_w(0), R(0)) \in \varGamma\). The next theorem give us the existence and uniqueness of the global positive solution.
Theorem 1
For any given initial value \(( S(0),I_a(0), I_s(0), Q_u(0), Q_w(0), R(0)) \in \varGamma\), the model (2) has a unique positive solution \(( S(t),I_a(t), I_s(t), Q_u(t), Q_w(t), R(t))\) on \(t \ge 0\) and the solution will remain in \(\varGamma\) with probability 1, namely
\(\mathcal {P} \bigg (( S(t),I_a(t), I_s(t), Q_u(t), Q_w(t), R(t)) \in \varGamma \bigg ) =1\) for all \(t\ge 0\).
Proof
Since the coefficients of the system (2) are locally Lipschitz continuous, for any given initial value \(( S(0),I_a(0), I_s(0), Q_u(0), Q_w(0), R(0)) \in \varGamma\), there is a unique local positive solution (see [9]) \(( S(t),I_a(t), I_s(t), Q_u(t), Q_w(t),R(t))\) on \([0,\tau _e),\) where \(\tau _e\) is the explosion time [9]. So, to show this solution is global, we need to show that \(\tau _e = \infty\) a.s. First, we show that S(t), \(I_a(t)\), \(I_s(t)\), \(Q_u(t)\), \(Q_w(t)\), R(t) do not explode to infinity in a finite time.
Let \(k_0>0\) such that be sufficiently large so that \(S(0)\in [\frac{1}{k_0},k_0], \, I_a(0)\in [\frac{1}{k_0},k_0], \, I_s(0)\in [\frac{1}{k_0},k_0], \, Q_u(0)\in [\frac{1}{k_0},k_0], \, Q_w(0)\in [\frac{1}{k_0},k_0], \, R(0) \in [\frac{1}{k_0},k_0]\). Then For each integer \(k \ge k_0\), we define the stop** time \(\tau _k\) by
where throughout this paper we set \(\inf \emptyset = \infty\) (as usual \(\emptyset\) denotes the empty set). Remark that’s \(\tau _k\) is increasing as \(k\uparrow \infty\). Set \(\displaystyle \tau _\infty = \lim _{k\rightarrow \infty }\tau _k\), whence, \(\tau _{\infty }\le \tau _e\) a.s. To complete the proof it is required to show that \(\tau _{\infty }=\infty\) a.s.
If \(\tau _\infty =\infty\) a.s is true, then \(\tau _e = \infty\) a.s and \((S(t),I_a(t),I_s(t), Q_u(t), Q_w(t), R(t))\in \mathbb {R}_{+}^{6}\) a.s for \(t \ge 0\). If this statement is false i.e \(\tau _e=\infty \, \text {a.s.}\), then there exists a pair of constants \(T>0\) and \(\varepsilon \in (0,1)\) such that
Thus there is an integer \(k_1 \ge k_0\) such that
Consider the \(C^2\)-function \(V_1: \mathbb {R}_+^6\rightarrow \mathbb {R}_+\) as follows
We note that the \(V_1\) is a nonnegative function, and it can be verified from the fact that \(\forall y \in \mathbb {R}^+_* \quad y - \log y - 1 \ge 0\).
Let \(x(t) = (S(t), I_a(t), I_s(t), Q_u(t), Q_w(t), R(t)).\) Then by the Dynkin formula see [13], we obtain for all \(k \ge k_1\)
where \(L V_1\) is given by
Thus
Hence
where K is a positive constant and \(K=\varLambda + 6\mu + \lambda _1+ \lambda _2+ \lambda _3 +\gamma _1+ \gamma _2+\gamma _3 +\gamma _4+ \theta _1+\frac{\sigma _1^{2} \varLambda ^2}{\mu ^2}+\frac{\sigma _2^{2} \varLambda ^2}{\mu ^2} + \beta _1 \frac{\varLambda }{\mu } +\beta _2 \frac{\varLambda }{\mu }.\)
Substituting (10) in (9) we obtain
Let \(\varOmega _k = \{ \tau _k \le T\}\), from inequality(7), we can know that \({ \mathcal {P}}(\varOmega _k)\ge \epsilon\), for \(k\ge k_1\). And for all \(\omega \in \varOmega _k\), there exists at least one of \(x(\tau _k,\omega )\) which equals either k or \(\frac{1}{k}\). Thus, we get \(V_1(x(T\wedge \tau _k))\) is no less than either \(k-1-\ln k\) or \(\frac{1}{k}-1+\ln k\).
On the other hand, we have \(V_1(x(T\wedge \tau _k))\ge 0\), thus
where \(1_{\varOmega _k}\) represent the indicator function of \(\varOmega _k\).
As a result, we can have
where
Approaching k to \(\infty\) will lead us to the contradiction \(\infty > V_1(x(0)+K T=\infty\) showing that \(\tau _\infty =\infty\) a.s, which means that the solution of the model (2) is positive and global.
Consequently, the proof of Theorem 1 is completed. \(\square\)
3.2 Extinction of the disease
The main problem in epidemiology is how we investigate the infectious disease behavior so that the epidemic will be vanished in a long term. In this section, we investigate sufficient conditions for the extinction of the disease of the system (2).
Lemma 1
Let f be an integrable function on \(\mathbb {R}\), if \(\displaystyle \lim _{t\rightarrow + \infty } f(t) =l \, a.s\) then
Proof
Noting \(\displaystyle \lim _{t\rightarrow + \infty } f(t) =l \, a.s\), we have \(\forall \, \varepsilon > 0 \, \, \exists \, T_\omega ^{1}(\varepsilon ) \, \, \forall t \ge T_\omega ^{1}(\varepsilon ) \, \, \vert f(t) - l \vert < \frac{a \varepsilon }{3}\) moreover
Furthermore
Consequently,
The proof is therefore completed. \(\square\)
Define
Then we have the following theorem:
Theorem 2
Assume that \((S(t),I_a(t),I_s(t),Q_u(t),Q_w(t),R(t))\) be the solution of the stochastic differential equation (2) along with initial value
\((S(0),I_a(0),I_s(0),Q_u(0),Q_w(0), R(0))\in \varGamma\). If \(\mathcal {R}_1^e < 1\) and \(\mathcal {R}_2^e < 1\) hold, then the solution of the stochastic differential equation (2) obeys
\(\displaystyle \lim _{t\rightarrow + \infty } I_a(t)=\lim _{t\rightarrow + \infty }I_s(t)=\lim _{t\rightarrow + \infty } Q_u(t) =0 \, a.s.\)
moreover \(\displaystyle \lim _{t\rightarrow +\infty } S( t ) = \frac{\varLambda }{\mu +\lambda _3} \, a.s.\), \(\displaystyle \lim _{t\rightarrow + \infty } Q_w(t) = \frac{\varLambda \lambda _3}{(\mu +\lambda _3)(\mu +\gamma _4)} \, a.s.\), and \(\displaystyle \lim _{t\rightarrow + \infty } R(t) = \frac{\varLambda \lambda _3 \gamma _4}{\mu (\mu +\lambda _3)(\mu +\gamma _4)} \, a.s.\)
Proof
Applying Itô’s formula we get:
and
Hence
and
Intergrating both sides of (15) and (16) along [0; t] and dividing by t, we have that
where \(\displaystyle X_1(t)= \int _0^t \sigma _1 S(\tau ) dB_1 (\tau )\) and \(\displaystyle X_2(t)= \int _0^t \sigma _2 S(\tau ) dB_2 (\tau )\).
Using Remark 1 we deduce that the solution is bounded. Then, from strong law of large numbers, we get \(\displaystyle \lim _{t \rightarrow +\infty }\frac{X_1(t)}{t}=\lim _{t\rightarrow +\infty }\frac{X_2(t)}{t}=0\) a.s.
Taking the superior limit of both sides of (17) and (18), we deduce
and
Which implies
and
Making use of (19) and (20), we can see that \({\mathcal {P}} (\varOmega _1)=1\), where
\(\displaystyle \varOmega _1 = \{ \omega \in \varOmega : \lim _{t\rightarrow + \infty } I_a(t)=\lim _{t\rightarrow + \infty } I_s(t)=0 \}\).
Hence, for any \(\omega \in \varOmega _1\) and any constant \(\varepsilon > 0\), there exists a constant \(T_1(\omega , \varepsilon )\) such that
From the third equation of system (2), and using (21), we obtain
\(dQ_u(\omega , t ) \le \Big ( (\lambda _1+\lambda _2) \varepsilon - ( \mu _3 + \gamma _3)Q_u \Big )dt, \, \, \forall \omega \in \varOmega _1, \, t > T_1.\)
This together with comparaison theorem, implies
Extinding \(\varepsilon\) to 0 and using the fact that \(Q_u(\omega , t) \ge 0\) for all \(\omega \in \varOmega _1\) and \(t > 0\), we have \(\displaystyle \lim _{t\rightarrow + \infty } Q_u(\omega , t ) = 0 \,\) forall \(\omega \in \varOmega _1\)
Since \({\mathcal {P}}(\varOmega _1)=0\), implies that
Thus, it follows from (19), (20) and (22) that \({\mathcal {P}} (\varOmega _2)=1\), where
\(\displaystyle \varOmega _2 = \{ \omega \in \varOmega : \lim _{t\rightarrow + \infty } I_a(t)=\lim _{t\rightarrow + \infty } I_s(t)=\lim _{t\rightarrow + \infty } Q_u(t)=0 \}.\)
Define \(X(t)=S(t)+I_a(t)+I_s(t)\).
By adding the third first equations of system (2), we get
It follows thanks to method of constant variation that,
So we get which easily implies
This together with Lemma 1 and \(\displaystyle \limsup _{t\rightarrow +\infty } I_a( t )= \limsup _{t\rightarrow + \infty } I_s( t )=0 \, \, a.s\), implies \(\displaystyle \lim _{t\rightarrow +\infty } X( t )= \frac{\varLambda }{\mu +\lambda _3}.\)
That is, we obtain
From the fivth equation of system (2), one has \(Q_w(t) = e^{-(\mu + \gamma _4 )t} \Bigg ( Q_w(0) + \lambda _3 \int _0^t S(x) e^{(\mu + \gamma _4 )x} dx \Bigg ).\)
Thus, it follows from (24) and the Lemma 1 that
\(\displaystyle \lim _{t\rightarrow +\infty } Q_w( t )= \frac{\lambda _3 \varLambda }{(\mu +\lambda _3)(\mu +\gamma _4)} \, \, a.s.\)
By the same way, we have
Implies \(\displaystyle \lim _{t\rightarrow + \infty } R( t )= \frac{\lambda _3 \varLambda \gamma _4}{ \mu (\mu +\lambda _3)(\mu +\gamma _4)} \, \, a.s.\) The proof is therefore completed. \(\square\)
3.3 Persistence in mean
In the epidemic models, persistence is an important property because it implies that the disease continues to exist for any initial conditions. Firstly, we give the following lemma.
Lemma 2
Let \(f \in \mathcal {C}[[0;\infty )\times \varOmega ; (0;\infty ) ]\). If there exist positive constants \(\lambda _0, \, \lambda\) such that
for all \(t \ge 0\) where \(F \in \mathcal {C}[[0;\infty )\times \varOmega ; \mathbb {R}]\) verifies \(\displaystyle \lim _{t\rightarrow + \infty }\frac{F(t)}{t}=0 \quad a.s.\) Then
For the detailed proof, we can refer to [5], here we omit it.
Let
Theorem 3
Let \((S(t),I_a(t),I_s(t),Q_u(t),Q_w(t),R(t))\) be a solution of system (2) with initial value for any given initial values \((S(0),I_a(0),I_s(0),Q_u(0),Q_w(0),R(0))\in \varGamma\),
-
1.
if \(\mathcal {R}_1 ^p > 1\) we have \(I_a\) satisfies
$$\begin{aligned} \liminf _{t\rightarrow + \infty } \frac{1}{t}\int _0^t I_a(\tau ) d\tau&\ge \frac{(\mu +\lambda _3)}{\beta _1} \left[ \mathcal {R}_1^p - 1 \right] \end{aligned}$$ -
2.
if \(\mathcal {R}_2 ^p > 1\) we have \(I_s\) satisfies
$$\begin{aligned} \liminf _{t\rightarrow + \infty } \frac{1}{t}\int _0^tI_s(\tau ) d\tau&\ge \frac{(\mu +\lambda _3)}{\beta _2} \left[ \mathcal {R}_2^p - 1 \right] \end{aligned}$$ -
3.
Assuming that \(\mathcal {R}_1 ^p > 1\), \(\mathcal {R}_2 ^p > 1\), \(I_a\) and \(I_s\) satisfy
$$\begin{aligned} \liminf _{t\rightarrow + \infty }\frac{1}{t} \int _0^t \bigg ( I_a(\tau )+ I_s(\tau ) \bigg ) d\tau \ge&\frac{1}{B} \Bigg [\bigg ( \mu +\lambda _1 +\gamma _1 \bigg )\bigg (\mathcal {R}_1^p -1 \bigg )\\ {}&+\bigg (\mu +\lambda _2+\gamma _2 \bigg )\bigg ( \mathcal {R}_2^p -1 \bigg )\Bigg ] \, a.s., \end{aligned}$$
for some positive constant B and then the solutions of stochastic model (2) starting from any point in \(\mathbb {R}_{+}^{6}\) are persistent in mean.
Proof
(1) Let F the function define by \(F(t) = S(t)+I_a(t)+I_s(t)\). Then from the first three equations of the system we get
\(dF(t)= \left[ \varLambda -(\mu +\lambda _3) S-(\mu +\lambda _1+\gamma _1)I_a - (\mu +\lambda _2+\gamma _2)I_s \right] dt\)
This implies that, for all \(t>0\) we have
By Itô’s formula, we have
By integrating the both sides of (27) from 0 to t, we obtain
where \(Y_1(t) = \int _0^t \sigma _1 S(\tau )dB_1(\tau )\).
Hence, we have
Assuming that \(\mathcal {R}_2 ^p < 1\), so by combining Theorem 1, strong law of large numbers and Lemma 2 we deduce
(2) By the similar way, one can prove this case. 3. Consider the function \(V(t)=\log (I_a(t)) +\log (I_s(t))\).
By Itô’s formula, we have
By integrating the both sides of (30) from 0 to t and dividing by t, for all \(t>0\), we obtain
where \(M(t) = \int _0^t \sigma _1 S(\tau )dB_1(\tau )+\int _0^t \sigma _2 S(\tau )dB_2(\tau )\)
Substituting (26) in (31), we have
where
\(G(t)= - \frac{(\beta _1+\beta _2)(S(t)+I_a(t)+I_s(t))}{(\mu +\lambda _3)}+ \frac{(\beta _1+\beta _2) (S(0)+I_a(0)+I_s(0))}{(\mu +\lambda _3)}+ \log (I_a(0)) + \log (I_s(0) + M(t).\)
It is clear that \(\displaystyle \lim _{t\rightarrow + \infty } \frac{G(t)}{t}=0\).
Thus
Since \(\log \bigg (\frac{I_a(t)+I_s(t)}{2} \bigg ) \ge \dfrac{\log (I_a(t))+\log (I_s(t))}{2}\), we have
where \(A= max \{ \frac{(\beta _1 +\beta _2)(\lambda _1+\mu + \gamma _1)}{( \mu +\lambda _3)} \,; \, \frac{(\beta _1 +\beta _2)(\lambda _2+\mu +\gamma _2)}{( \mu +\lambda _3)} \}\).
Combining Theorem 1, strong law of large numbers and Lemma 2 we obtain the desired assertion.
where \(B=2 A\).
This completes the proof. \(\square\)
4 Numerical simulations
For a very empirical discipline like medicine, a new disease is always a challenge. New clinical signs to identify, new therapeutic strategies to implement. In this sense, although many treatments specifically designed for Covid-19 are under study, several countries have opted for a few care protocols for symptomatic cases that have shown their effectiveness at least in reducing mortality and the number of severe cases, restricting the need for ventilation and the length of hospitalization.
We proposed a new deterministic model with four compartments (Susceptible, infected symptomatic, infected asymptomatic, quarantined without any treatment and medical monitoring, quarantined, but under treatment and medical supervision) with treatment and its corresponding stochastic model to describe the dynamic behavior of COVID-19. In addition to that, we have used parameters and variables pertaining to the effects of quarantine and confirmation methods and introduced a saturated incidence rate and a treatment function which characterizes the effect of limited treatment capacity on the spread of infection.
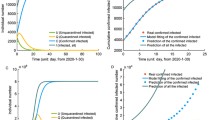
In order to simulate our theoretical results for Theorems 2 and 3 and to illustrate the dynamic difference between the deterministic system and the stochastic system, we next carry out some numerical simulations using the Euler-Maruyama method and with the help of Matlab soft-ware. In the figures, the blue lines and the red lines represent solutions of deterministic model (1) and stochastic model (2) respectively. We choose \(S(0) =0.6\), \(I_a(0) =0.4\), \(I_s(0) =0.5\), \(Q_u(0) =0.4\), \(Q_w(0) =0.3\), \(R(0) =0.2\).
Example 1
-
In Fig. 2 we choose \(\varLambda =0.7;\mu =0.5; \beta _1=0.6; \beta _2=0.65; \lambda _1=0.4; \lambda _2=0.35; \lambda _3=0.45; \gamma _1=0.07; \gamma _2=0.07; \gamma 3=0.08; \gamma _4=0.02; \theta _1=0.3; \theta _2=0.2; \sigma _1=0.7; \sigma _2=0.8\). A simple computation shows that \(\mathcal {R}_1=0.8148\),\(\mathcal {R}_2=0.9891\), \(\mathcal {R}_1^e=0.37092< 1\), \(\mathcal {R}_2^e=0.30739< 1\). Hence, according to Theorem 2, the disease will disappear. Figure 2 clearly support this result.
Example 2
-
To verify the analytical conditions mentioned in Theorem 3 we present the various simulations corresponding to the theoretical results proved with respect to different suitable parameters, illustrating persistence of the disease.
-
(a)
In Fig. 3 we choose the parameter values as follows: \(\varLambda =0.5; \mu =0.2; \beta _1=0.9; \beta _2=0.85; \lambda _1=0.1; \lambda _2=0.3; \lambda _3=0.32; \gamma _1=0.35; \gamma _2=0.1; \gamma _3=0.15; \gamma _4=0.1; \theta _1=0.1; \theta _2=0.2; \sigma _1=0.2; \sigma _2=0.15\) In this case, by simple calculation it can be found that \({\mathcal {R}_1}=1.4625\), \({\mathcal {R}_2}=3.5416\), \(\mathcal {R}_1 ^p=1.139 > 1\), \(\mathcal {R}_2 ^p= 1.2449 > 1\). This descriptions support our results in Theorem 3.
-
(b)
Note that in this case \(\varLambda =0.5; \mu =0.2; \beta _1=0.5; \beta _2=0.9; \lambda _1=0.2; \lambda _2=0.3; \lambda _3=0.32; \gamma _1=0.08; \gamma _2=0.1; \gamma _3=0.15; \gamma _4=0.1; \theta _1=0.1; \theta _2=0.2; \sigma _1=0.2; \sigma _2=0.1\). By computation, we have \({\mathcal {R}_1}=0.6\), \({\mathcal {R}_2}=3.75\), \(\mathcal {R}_1 ^p=0.7412 <1\), \(\mathcal {R}_2 ^p= 1.3902 >1\). Hence, according to Theorem 3, the result is coherent with graphic representation in Fig. 4.
-
(c)
Choose the parameters in system (1) and system (2) as follows: \(\varLambda =0.4; \mu =0.25; \beta _1=0.9; \beta _2=0.4; \lambda _1=0.4; \lambda _2=0.3; \lambda _3=0.1; \gamma _1=0.08; \gamma _2=0.1; \gamma _3=0.15; \gamma _4=0.1; \theta _1=0.1; \theta _2=0.2; \sigma _1=0.3; \sigma _2=0.2\). By direct calculation, we obtain \({\mathcal {R}_1}=1.0512\), \({\mathcal {R}_2}=0.9846\), \(\mathcal {R}_1 ^p=1.2512> 1\), \(\mathcal {R}_2 ^p= 0.6245 < 1\). This result is coherent with graphic representation in Fig. 5.

Trajectories of stochastic and deterministic systems with the parameters values given in Example 1

Trajectories of stochastic and deterministic systems with the parameters values given in case (a)

Trajectories of stochastic and deterministic systems with the parameters values given in in case (b)

Trajectories of stochastic and deterministic systems with the parameters values given in in case (c)
5 Conclusion and perspectives
Due to its massive global outbreak, the 2019-nCoV virus has proven to be one of the worldwide deadliest diseases over history. It has posed a potential threat to human health attracting worldwide attention after the (SARS) 2003 and the (MERS) 2012. Preventive measures are strictly implemented such as: social distancing, quarantines of symptomatic individuals, together with tracing and testing of their non-symptomatic contacts. These measures have proven to be effective in significantly reducing the prevalence of the virus.
By having recourse to the stochastic theory and the compartmental mathematical model kee** in view the characteristics of the novel COVID-19, our study seeks to study the spread and the transmission dynamics. Firstly, through using the results of stochastic Lyapunov functions theory, we have shown that our model is mathematically and biologically well-posed by proving global existence and uniqueness of positive solutions. Secondly, the extinction of the disease was further discussed to determine the conditions that could help to put an end to the disease.
In comparison with other standard models, the one presented in this paper offers several advantages and underlines the importance of including the compartments of asymptomatic infected and quarantined cases without any medical follow-up since their presence influences the overall dynamics of the infection, the big challenge in this sense is then to take suitable measures for the detection of the mentioned cases. Admittedly, the proposed model can be improved for example by adding other epidemic compartments or by considering other types of noise or by choising a stochastic recruitment or by supposing a distributed delay. Taking into account these last considerations, a future work will be devoted to the improvement of the proposed model and to be able to compare the results with those found in other papers like [7, 11, 14].
We retain, according to the results of this paper, the major impact on the dynamics of Covid-19 of the adoption of a protocol for the treatment of symptomatic cases in addition to preventive measures such as quarantine, i.e. individuals undergoing neither treatment nor medical monitoring will be generally isolated in their home with restriction of movement. However, Those with symptomatic treatment and medical supervision will be separated and restricted of movement as well.
Data Availability
Data availability is not applicable to this article.
References
Anderson, R.M., and R.M. May. 1978. Regulation and stability of host-parasite population interactions: I. Regulatory processes. The Journal of Animal Ecology 47: 219–247.
Boukanjime, B., T. Caraballo, M. El Fatini, and M. El Khalifi. 2020. Dynamics of a stochastic coronavirus (COVID-19) epidemic model with Markovian switching. Chaos, Solitons & Fractals 141: 110361.
Capasso, V., and G. Serio. 1978. A generalization of the Kermack–McKendrick deterministic epidemic model. Mathematical Biosciences 42 (1–2): 43–61.
Ding, Y., Y. Fu, and Y. Kang. 2021. Stochastic analysis of COVID-19 by a SEIR model with Lévy noise. Chaos: An Interdisciplinary Journal of Nonlinear Science 31 (4): 043132.
Ji, C., and D. Jiang. 2014. Threshold behaviour of a stochastic SIR model. Applied Mathematical Modelling 38 (21–22): 5067–5079.
Khan, A., Y. Sabbar, and A. Din. 2022. Stochastic modeling of the Monkeypox 2022 epidemic with cross-infection hypothesis in a highly disturbed environment. Mathematical Biosciences and Engineering 19: 13560–13581.
Kiouach, D., and Y. Sabbar. 2022. The long-time behavior of a stochastic SIR epidemic model with distributed delay and multidimensional Lévy jumps. International Journal of Biomathematics 15 (03): 2250004.
Maladie Covid-19 (nouveau coronavirus) https://www.pasteur.fr/fr/centre-medical/fiches-maladies/maladie-covid-19-nouveau-coronavirus. Accessed 11 Jan 2021.
Mao, X., G. Marion, and E. Renshaw. 2002. Environmental Brownian noise suppresses explosions in population dynamics. Stochastic Processes and their Applications 97 (1): 95–110.
Mao, X. 2007. Stochastic differential equations and applications. Amsterdam: Elsevier.
Menouer, M.A., N. Gul, S. Djilali, A. Zeb, and Z.A. Khan. 2022. Effect of treatment and protection measures on the outbreak of infectious disease using AN sir epidemic model with two delays, discrete and distributed. Fractals 30: 2240223.
Mishra, B.K., A.K. Keshri, Yerra Rao, S. Yerra, et al. 2020. COVID-19 created chaos across the globe: Three novel quarantine epidemic models. Chaos, Solitons & Fractals 138: 109928.
øksendal, B. 2013. Stochastic differential equations: An introduction with applications. New York: Springer Science & Business Media.
Sabbar, Y., D. Kiouach, S.P. Rajasekar, and S.E.A. El-Idrissi. 2022. The influence of quadratic Lévy noise on the dynamic of an SIC contagious illness model: New framework, critical comparison and an application to COVID-19 (SARS-CoV-2) case. Chaos, Solitons & Fractals 159: 112110.
Taki, R., M. El Fatini, M. El Khalifi, M. Lakhal, and K. Wang. 2021. Understanding death risks of Covid-19 under media awareness strategy: A stochastic approach. The Journal of Analysis 30: 1–21.
Wang, Y., Y. Wang, Y. Chen, and Q. Qin. 2020. Unique epidemiological and clinical features of the emerging 2019 novel coronavirus pneumonia (COVID-19) implicate special control measures. Journal of Medical Virology 92 (6): 568–576.
Zeb, A., Alzahrani, E., Erturk, V. S., and Zaman, G. 2020. Mathematical model for coronavirus disease 2019 (COVID-19) containing isolation class. BioMed Res. Int. 2020.
Zhang, X., and X. Liu. 2008. Backward bifurcation of an epidemic model with saturated treatment function. Journal of Mathematical Analysis and Applications 348 (1): 433–443.
Zhang, Z., A. Zeb, O.F. Egbelowo, and V.S. Erturk. 2020. Dynamics of a fractional order mathematical model for COVID-19 epidemic. Advances in Difference Equations 2020 (1): 1–16.
Zhang, Z., A. Zeb, S. Hussain, and E. Alzahrani. 2020. Dynamics of COVID-19 mathematical model with stochastic perturbation. Advances in Difference Equations 2020 (1): 1–12.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by S. Ponnusamy.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Lakhal, M., Taki, R., El Fatini, M. et al. Quarantine alone or in combination with treatment measures to control COVID-19. J Anal 31, 2347–2369 (2023). https://doi.org/10.1007/s41478-023-00569-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41478-023-00569-4