
Abstract
Zeroing neural networks (ZNN) have shown their state-of-the-art performance on dynamic problems. However, ZNNs are vulnerable to perturbations, which causes reliability concerns in these models owing to the potentially severe consequences. Although it has been reported that some models possess enhanced robustness but cost worse convergence speed. In order to address these problems, a robust neural dynamic with an adaptive coefficient (RNDAC) model is proposed, aided by the novel adaptive activation function and robust evolution formula to boost convergence speed and preserve robustness accuracy. In order to validate and analyze the performance of the RNDAC model, it is applied to solve the dynamic matrix square root (DMSR) problem. Related experiment results show that the RNDAC model reliably solves the DMSR question perturbed by various noises. Using the RNDAC model, we are able to reduce the residual error from 10\(^1\) to 10\(^{-4}\) with noise perturbed and reached a satisfying and competitive convergence speed, which converges within 3 s.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The dynamic matrix square root problem (DMSR) is broadly applied to engineering and research, such as power system interconnection [1], automatic control [2], signal processing [3], neural networks [4], etc. Many practical engineering applications or problems can be transformed into a potential DMSR problem, which attracted an increasing number of researchers for these topics, replacing time-independent problems. Among many works, the zeroing neural network (ZNN) is one of the most comprehensively investigated ways to resolve dynamic problems [1).
This gap motivated us to propose a more efficient activation function to improve the performance of ZNN models aided by the residual error information while maintaining the robustness even perturbed by noises. Therefore, the adaptive activation function is proposed, which can activate each component of the solution system to be activated separately in a decoupled manner and leads to better convergence and accuracy performance. After that, combining the robust evolution formula, the RDNAC model is proposed. Then the proposed RDNAC model is applied to deal with the DMSR problem for the first time to demonstrate effectiveness and potential. The most characteristic of the RNDAC model is to adopt the component information of the residual error to optimize the real-time solution effect of the model for the first time. Further, comprehensive mathematical derivation and experiments demonstrated the validity and superiority of the RNDAC model theoretically and empirically, respectively. To overview the general design and implementation process, the RNDAC model’s graphical flowchart of the RNDAC model to solve the DMSR problem is shown in Fig. 1. First, the error function is established based on the definition of the DSMR problem for monitoring the solution state. Second, the evolution formula of RNDAC is proposed to improve the convergence speed and enhance the robustness of existing models. Third, by combining the error function and substituting it with the evolution function, the RNDAC model to solve the DMSR problem is implemented. Finally, comprehensive comparison experiments are designed and conducted to verify the performance of the RNDAC model. The main contributions of this paper are listed as follows:
-
1.
Different from previous work, the RNDAC model designs a new evolution formula and employs a new nonlinear adaptive activation function, which accelerates the convergence to the theoretical solution of the DMSR problem and gains a predominant performance in robustness.
-
2.
Four theorems are given to verify the performance of the RNDAC model and analyze its robustness under three kinds of noises: constant, time-varying linear, and bounded random noises while solving the DMSR problem. Besides, the proof processes are given in detail.
-
3.
The relevant quantitative and visual simulation experiments are carried out with a specific example to demonstrate the superior convergence and robustness of the RNDAC model under noise interference.
The rest of the structure is organized into the following six sections. “Preliminaries and related scheme formulation” shows the formulation and preliminary preparation of the DMSR problem to be solved. Next, the construction and evolution formula of the RNDAC model is given, and the corresponding analyses and proofs of the convergence of the RNDAC model are carried out in “RNDAC model construction and convergence analysis”. “Robustness of the RNDAC model”, rigorous theoretical analysis, and corresponding proof steps are given, which perfectly completes the proof of the robustness of the RNDAC model. “Simulations” provides quantitative and visual results and analyzes, which further illustrates the superiority of the RNDAC model through comparative experiments. Furthermore, the highlights and limitations of this work are discussed and presented in “Discussion”. Finally, the paper is summarized in “Conclusions”.
Preliminaries and related scheme formulation
The mathematical formula of the DMSR problem is expressed as follows:
where the matrix \(N(t)\in {\mathbb {R}}^{n\times n}\) is a known smooth dynamic matrix, and \(X(t)\in {\mathbb {R}}^{n\times n}\) is the unknown dynamic matrix to be solved with t denotes time. The superscript \(^{\text {2}}\) stands for the square operator of the matrix. It can be seen that the actual meaning of making the Eq. (1) holds is to find a suitable solution X(t). To this end, the error function is furnished as
Note that the condition of the Eq. (1) holds is equivalent to all components of the error function \(\Lambda (t)\) are zero. To address this problem, the original zeroing neural network (OZNN) model is adopted [2]. In light of the evolution formula of OZNN \({\dot{\Lambda }}(t)=-\gamma \Lambda (t)\) and error function (2), the following OZNN model for solving the DMSR problem (1) is presented as
where \(\gamma > 0\) is a scale factor. \(\dot{X}(t)\) and \(\dot{N}(t)\) represent the time derivative of X(t) and N(t), respectively.

Graphical flowchart of the RNDAC model to solve the DMSR problem
Noteworthy, the convergence speed and robustness of the OZNN model (3) are unsatisfactory. Given the disturbance of various noises that severely weaken the accuracy of the solution system or even make it break down. A residual-based adaptive coefficient ZNN (RACZNN) model is presented in [21]. The RACZNN model effectively avoids the problem of inflexibility in manually setting the scale factor and makes convergence faster. The RACZNN model is formulated as
where the adaptive scale coefficient \(\varepsilon (\cdot )> 0: {\mathbb {R}}^{n \times n}\rightarrow {\mathbb {R}}\) and feedback coefficient \(\sigma (\cdot )> 0: {\mathbb {R}}^{n \times n}\rightarrow {\mathbb {R}}\). The adaptive scale coefficient \(\varepsilon (\cdot )\) is constructed as
where the parameter \(e > 1\) and \(\Vert \cdot \Vert _{\text {F}}\) represents the Frobenius norm. Similarly, the adaptive feedback coefficient \(\sigma (\cdot )\) is constructed as
where the parameter \(g>0\).
RNDAC model construction and convergence analysis
To solve the DMSR problem (1) robustly under various noise interference environments and accelerate the convergence, the RNDAC model is proposed in this section.
Model formulation
Different from previous work, a new evolution formula is developed, which makes the RNDAC model perform better in the two crucial performance indicators of solution accuracy and convergence speed. The evolution formula of the RNDAC model is designed as
where the scale coefficient \(\eta >0\) and the feedback coefficient \(\zeta >0\). Function \(\kappa (\cdot ): {\mathbb {R}}^{n \times n}\rightarrow {\mathbb {R}}^{n \times n}\) and \(\varphi (\cdot ): {\mathbb {R}}^{n \times n} \rightarrow {\mathbb {R}}^{n \times n}\) represent the adaptive control and the adaptive feedback activation function, respectively. The following expression of \(f(\cdot )\) that can be used to construct both the adaptive control \(\kappa (\cdot )\) and the adaptive feedback activation function \(\varphi (\cdot )\):
-
Power bounded adaptive function:
$$\begin{aligned} f({\Lambda }_{ij})= {\left\{ \begin{array}{ll} \varsigma ^{+}, &{} {\Lambda }_{ij} > \varsigma ^{+}, \\ \vert {\Lambda }_{ij}\vert ^{\iota }{\Lambda }_{ij} + \varpi {\Lambda }_{ij}, &{} \varsigma ^{-}\le {\Lambda }_{ij}\le \varsigma ^{+}, \\ \varsigma ^{-}, &{} {\Lambda }_{ij} < \varsigma ^{-}, \\ \end{array}\right. } \nonumber \\ \end{aligned}$$(8) -
Exponential bounded adaptive function:
$$\begin{aligned} f({\Lambda }_{ij})= {\left\{ \begin{array}{ll} \varsigma ^{+}, &{} {\Lambda }_{ij} > \varsigma ^{+}, \\ {\text {exp}}(\vert {\Lambda }_{ij}\vert ){\Lambda }_{ij} + \varpi {\Lambda }_{ij}, &{} \varsigma ^{-}\le {\Lambda }_{ij}\le \varsigma ^{+}, \\ \varsigma ^{-}, &{} {\Lambda }_{ij} < \varsigma ^{-}, \\ \end{array}\right. }\nonumber \\ \end{aligned}$$(9)
where \(i, j = 1, 2,...,n,\) and parameter \(\varsigma >0\), which is adapted to limit the residual error of the solving system and enhance the robustness. Hyperparameters \(\varpi >1\) and \(\iota >1\) are utilized to control the convergence speed.
Therefore, through the combination of Eqs. (2) and (7), the RNDAC model for solving the DMSR problem (1) is formulated as
In addition, the RNDAC model (10) is inevitably affected by different noises in practical application environments. Hence, here give the form of the RNDAC model (10) for solving the DMSR problem (1) under noises interference as follows:
where the noises perturbation item \({\nu }(t)\in {\mathbb {R}}^{n\times n}\).
Remark 1
Since the RNDAC model (10) is based on the continuous-time ZNN model, the “ode45“ solver in MATLAB is exploited to transfer the RNDAC model (10) into an ordinary differential equation for simulation with an approximate continuous-time from and compare with different existing ZNN models. Specifically, the RNDAC model (10) is transformed into an initial value ordinary differential equation with a mass matrix to solve the target solution X(t) in real time by using the Runge–Kutta method. The target solution X(t) obtained over time is input to the obtained error function \(\Lambda (t)\), and the residual error is generated until the accuracy reaches the requirement, and the iteration ends.
Remark 2
There are some recent works on adaptive control. First, according to the adaptive event-triggered mechanism, the sliding mode control of a class of random switching systems is realized and applied to the boost converter circuit model [33]. Second, based on the adaptive backstep** design framework incorporated with the universal online approximation capability of neural networks, Su et al. [34] realizes the probability-based asymptotic tracking control and the probability-based asymptotic tracking control. Kong et al. [35] implement an adaptive strategy based on introducing a neural network to identify unknown nonlinear functions, uses an effective hypothesis to deal with unknown system coefficients and applies it to a class of uncertain switching MIMO non-strict feedback adaptive output feedback neural tracking control problem. Compared with the three models above, the novelty of the adaptive strategy in this paper is that it is the first time to apply the adaptive strategy to the direction of the ZNN model and solves the DMSR problem (1). Unlike these works, we use the residual and integral information to guide the convergence of the model.
Convergence analysis
We provide theorem and the corresponding proof to comprehensively analyze the convergence of the RNDAC model (10).
Theorem 1
Starting from a random initial state, the RNDAC model (10) global converges to the theoretical solution of the DMSR problem (1).
Proof
Based on the evolution formula (7), the ijth element of the RNDAC model (10) is depicted as
By introducing the Lyapunov theory [17, 36], the intermediate variable \(\vartheta (t)\) is introduced as
and its derivative form \({\dot{\vartheta }}(t)={\dot{\Lambda }}_{ij}(t)+ \kappa (\Lambda _{ij}(t))\). The Eq. (12) can be rewritten in the following form to analyze the stability of the proposed RNDAC model (10) based on the Lyapunov theory mentioned in paper [17, 36]. The following Lyapunov candidate function \(Y_{1}(t)\) is offered:
Moreover, the derivative form of Lyapunov candidate function \(Y_{1}(t)\) is expressed as \({\dot{Y}}_{1}(t) = -\vartheta ^{\text {T}}(t)\kappa (\vartheta (t))\). In light of the definition of activation function (8) and (9), the inequality is established as follows:
When \({\mathcal {L}}=0\), it has \(\Vert \vartheta (t)-\kappa (\vartheta (t))\Vert ^{2}_{\text {F}} \le \Vert \vartheta (t)\Vert ^{2}_{\text {F}}\). Besides, on the basis of the definition of \(\text {F}\)-norm, we can obtained:
Further, \(0 \le \kappa ^{\text {T}}(\vartheta (t))\kappa (\vartheta (t))\le 2\kappa ^{\text {T}}(\vartheta (t))\vartheta (t)\). Hence, the following inequality is obtained:
The time derivative of \(Y_{1}(t)\) as \({\dot{Y}}_{1}(t) \le 0\). Obviously, it can be known from Eq. (17) that the necessary and sufficient condition to satisfy \(Y_{1}(t) = 0\) and \({\dot{Y}}_{1}(t) = 0\) is if and only if \(\vartheta (t)=0\). Therefore, the \(\vartheta (t)\) is globally convergent to zero by the definition of Lyapunov stability theory.
Based on the LaSalles invariance principle [37] and \(\vartheta (t)=\Lambda (t)+\int _0^t\kappa (\Lambda (\delta ))\text {d}\delta =0\) which means \({\dot{\Lambda }}(t)=-\kappa (\Lambda (\delta ))\). Rearranging the Lyapunov candidate function as \(Y_{2}(t)=\Lambda ^{\text {T}}(t)\Lambda (t)\) is convenient for further proof steps, and the time derivative of \(Y_{2}(t)\) can be demonstrated as \({\dot{Y}}_{2}(t)=-\Lambda ^{\text {T}}(t)\kappa (\Lambda (t))\). Next, by referring to the preceding proof steps for \(Y_{1}(t)\) to prove the function \(Y_{2}(t)\), the completion that \(Y_{2}(t) \le 0\) can also be acquired. The elaborate proof steps for \(Y_{2}(t)\) are omitted here. Therefore, the RNDAC model (10) globally converges to the theoretical solution.
The proof is thus completed. \(\blacksquare \)
Computational complexity analysis
The feasibility of the RNDAC model (10) is further illustrated from the implementation and computational point of view. First, the magnitude of the variables in Eq. (10) are reviewed: \(\Lambda (t) \in {\mathbb {R}}^{n\times n}\), \(\kappa (\cdot ) \in {\mathbb {R}}^{n \times n}\) and \(\varphi (\cdot ) \in {\mathbb {R}}^{n \times n}\). Meanwhile, the addition, subtraction, multiplication, or division of two floating point numbers should be informed following to analyze the computational complexity of the RNDAC model (10).
-
The multiplication of a scalar and a vector of size \(s_1\) requires \(s_1\) floating point operations.
-
The addition or subtraction two matrices of size \(s_1 \times s_1\) requires \(s_1\) floating point operations.
-
The inverse of a square matrix of size \(s_1 \times s_1\) requires \({s_1}^3\) floating point operations.
-
For multiplication of a matrix and a vector, one of size \(s_1 \times s_2\) and another of size \(s_2\) require \(s_1(2s_2 - 1)\) floating point operations.
Based on the abovementioned preconditions, the calculation of \(X(t){\dot{X}}(t)+ {\dot{X}}(t)X(t) - {\dot{N}}(t)\) requires \(n^3+2n^2\) floating point operators; the calculation of \(\kappa (X^{\text {2}}(t)-N(t))\) requires \(n^3+6n^2-n\) floating point operators; the calculation of \(\eta \int _0^t\kappa (X^{\text {2}}(\delta )-N(\delta ))\text {d}\delta \) requires \(n^3 +8n^2+n+1\) floating point operators; the calculation of \(\Vert \cdot \Vert ^{\text {2}}_{\text {F}}\) requires \(2n^2-1\) floating point operators. The RNDAC model (10) costs \(n^3+8n^2+2n+3\) floating point operators at each time instant. It can be easily obtained that the OZNN model (3) costs \(n^3+2n^2-n\) floating point operators, the RACZNN model (4) costs \(n^3+6n^2+4n\) floating point operators.
Robustness of the RNDAC model
In this section, three theorems and corresponding proof are provided for investigating the robustness of the RNDAC model (10) under noise injected environments.
Theorem 2
The residual error \(\Vert \Lambda (t)\Vert _{\text {F}}\) of the RNDAC model (10) for solving the DMSR problem (1) globally converges to zero under the disturbance of constant noises \(\nu (t) = \nu \in {\mathbb {R}}^{n \times n}\) when the bounds of the activation function satisfy \(-\zeta \varphi (\vartheta (t))+\nu \le 0\).
Proof
First, the intermediate variable is introduced as follows:
Referring to the defination of the intermediate variable \(\vartheta (t)\), the time-derivative of \(\vartheta (t)\) under the constant noises \(\nu \) is denoted as \({\dot{\vartheta }}(t)=-\zeta \varphi (\vartheta (t))+\nu \) and its ith subelement is expressed as
For further investigating the anti-interference performance of the RNDAC model (10), we construct the following Lyapunov candidate function \(L_{i}(t)=\vartheta ^{2}_{i}(t)/2\) and its time derivative as follows:
It can be concluded from the Eq> (19) that the sign of parameter \(\vartheta _{i}(t)\) is related on the positive or negative of the \(L_{i}(t)\). Therefore, for the three different cases of the symbolic value of parameter \(\vartheta _{i}(t)\), we discuss them independently.
If \(\vartheta _{i}(t)<0\)
In accordance with the definition of the exponential bounded adaptive activation function, we can get the \(\varphi (\vartheta _{i}(t))<0\). Next, to ensure the final conclusion of \({\dot{L}}_{i}(t)<0\) is obtained. There are three different cases discussed and shown below.
-
Under the condition of \(-\zeta \varphi (\vartheta _{i}(t))+\nu _{i}>0\) and \(\vartheta _{i}(t)<0\), the Lyapunov candidate function \({\dot{L}}_{i}(t)<0\). Hence, we can get the conclusion that the system (18) converges to the theoretical solution of the DMSR problem (1) within finite time based on the Lyapunov theory [38].
-
Under the condition of \(-\zeta \varphi (\vartheta _{i}(t))+\nu _{i}=0\), by converting this equation, that is, \(\vartheta _{i}(t)=\varphi ^{-1}(\nu _{i}/\zeta )\). From the Eq. (19) can also be acquired simultaneously that the Lyapunov candidate function \({\dot{L}}_{i}(t)=0\). At this time, the system (18) converges to zero.
-
Under the condition of \(-\zeta \varphi (\vartheta _{i}(t))+\nu _{i}<0\), meanwhile, since the same signs of \(\vartheta _{i}(t)\) and \(-\zeta \varphi (\vartheta _{i}(t))+\nu _{i}\) are both less than zero, it is concluded that \({\dot{L}}_{i}(t)>0\), and the system (18) diverges. In addition, the absolute value of \(\vartheta _{i}(t)\) is proportional to the absolute value of \(\varphi (\vartheta _{i}(t))\) contemporaneously. That is to say, the absolute value of \(\varphi (\vartheta _{i}(t))\) becomes larger when the absolute value of \(\vartheta _{i}(t)\) becomes larger. The robustness of the system (18) in this case is concerned with the upper \(\varphi ^{+}\) and lower \(\varphi ^{-}\) bounds of the exponential bounded adaptive function, we divide the relationship between \(\zeta \varphi ^{-}\) and \(\nu _{i}\) into the following two subcases for further analysis. In front of \(\zeta \varphi ^{-}>\nu _{i}\), the system (18) diverges as time goes on. Inversely, in front of \(\zeta \varphi ^{-}<\nu _{i}\), the system (18) always exists a time t at which \(-\zeta \varphi (\vartheta _{i}(t))+\nu _{i}=0\) with the change of time, and the system (18) tends to be stable. Ultimately, to avoid system divergence, the scale parameter \(\zeta \) in (7) and (22) needs to be adjusted appropriately.
If \(\vartheta _{i}(t)=0\)
Distinctly, \(\varphi (\vartheta _{i}(t))=0\) and \({\dot{\vartheta }}_{i}(t)=\nu _{i}\) can be deduced from the Eq. (18) under this precondition. To ensure system stability, make constant noises \(\vartheta _{i}(t)>0\) when \(\nu _{i}>0\) or \(\vartheta _{i}(t)<0\) when \(\nu _{i}<0\). Accordingly, \(\vartheta _{i}(t)\) exists only as a transient state, and the system (18) is unstable when \(\nu _{i}(t) \ne 0\), which indicates that the situation will revert to the case of \(\vartheta _{i}(t)<0\) or \(\vartheta _{i}(t)>0\).
If \(\vartheta _{i}(t)>0\)
This part can be regarded as the opposite situation to \(\vartheta _{i}(t)<0\), which can be analyzed according to the same proof steps as \(\vartheta _{i}(t)<0\), and the detailed proof steps are omitted here.
After that, the convergence of the system (18) is analyzed in the state of \(t \rightarrow \infty \). Through mathematical derivation, we can get \(\lim \nolimits _{t \rightarrow \infty }\vartheta (t)=\varphi ^{-1}(\nu _{i}/\zeta )\) and \(\lim \nolimits _{t \rightarrow \infty }{\dot{\vartheta }}(t)=0\). When taking \(t \rightarrow \infty \) for the time t of the time derivative of the Eq. (13). That is, \({\dot{\vartheta }}(t)={\dot{\Lambda }}(t)+ \kappa (\Lambda (t))\) is reformulated as
In other words, this situation corresponds to the research of Theorem 1.
All in all, the RNDAC model (10) activated by the exponential bounded adaptive function can converge to the theoretical solution of the DMSR problem (1) under constant noises \(\nu \), and the residual error \(\Vert \Lambda (t)\Vert _{\text {F}}\) of the RNDAC model (10) also globally converges to zero.
The proof is thus completed. \(\blacksquare \)
Theorem 3
In the presence of time-varying linear noises \({\bar{\nu }}(t) \in {\mathbb {R}}^{n \times n}\), the RNDAC model (10) globally converges to the theoretical solution \(X^{*} (t)\) of the DMSR problem (1). Taking the bound of the RNDAC model (10) residual error is expressed as \(\lim \nolimits _{t \rightarrow \infty }\Vert \Lambda (t)\Vert _{\text {F}} =\Vert {\bar{\nu }}\Vert _{\text {F}} /\zeta \).
Proof
According to the definition of Laplace transform [39], the ijth subsystem of the RNDAC model (10) polluted by time-varying linear noises \({\overline{\nu }}(t)\) is rewritten as
where \(i,j = 1,2,...,n\) and it can be further derived into:
According to the final value theorem, the Eq. (18) is formulated as
It can be observed from the above formula (23) that the values of \(\zeta \) and \(\eta \) are related to the value of the \(\lim \nolimits _{t \rightarrow \infty }\Vert \Lambda _{ij}(t)\Vert _{\text {F}}\). When the value of \(\zeta \eta \) as the denominator of the Eq. (23) approaches to positive infinity, the final value \(\Vert \Lambda (t)\Vert _{\text {F}}\) can be further decribed as \(\lim \nolimits _{t \rightarrow \infty }\Vert \Lambda (t)\Vert _{\text {F}}=0\).
The proof is thus completed. \(\blacksquare \)
Theorem 4
Under the interference of bounded random noises \(\nu (t)=\phi (t) \in {\mathbb {R}}^{n \times n}\), the RNDAC model (10) starts from a randomly generated initial state and eventually converges to a certain bounded range.
Proof
The activation functions \(\kappa (\cdot )\) and \(\varphi (\cdot )\) are both specified as linear activation functions for the following proof process. And then, the Eq. (7) can be denoted as
Furthermore, adjusting the Eq. (24) to:
where the above auxiliary matrices are represented as \(H=[-\eta -\zeta , -\eta \kappa ;1, 0]\), \(W_{i}(t)=[\Lambda _{i}(t);\int _0^t\Lambda _{i}(\delta )\text {d}\delta ]\) and \(\textbf{p}=[1;0]\). Moreover, its ith subelement is indicated as
By solving the Eq. (26) can obtain:
Defined by the triangle inequality mentioned in reference [40], the following relational expression can be acquired:
Next, a detailed discussion is made according to the following three different situations:
-
Under the condition of \((\eta +\zeta )^2<4\eta \zeta \). Importing the auxiliary parameters \(\Theta _{1}=(-(\eta +\zeta )+\sqrt{(\eta +\zeta )^{2}-4\eta \zeta })/2 =-\eta \) and \(\Theta _{2}=(-(\eta +\zeta )-\sqrt{(\eta +\zeta )^{2}-4\eta \zeta })/2 =-\zeta \), we can get:
$$\begin{aligned}{} & {} \text {exp}(Ht)W_{i}(0) = \begin{bmatrix} \frac{\Lambda _{i}(0)(\Theta _{1}{\text {exp}}(\Theta _{1}t)-\Theta _{2}{\text {exp}}(\Theta _{2}t))}{\Theta _{1}-\Theta _{2}}\\ \frac{\Lambda _{i}(0)({\text {exp}}(\Theta _{1}t)-{\text {exp}}(\Theta _{2}t))}{\Theta _{1}-\Theta _{2}} \end{bmatrix}, \\{} & {} \text {exp}(Ht)p = \begin{bmatrix} \frac{\Theta _{1}{\text {exp}}(\Theta _{1}t)-\Theta _{2}{\text {exp}}(\Theta _{2}t)}{\Theta _{1}-\Theta _{2}}\\ \frac{{\text {exp}}(\Theta _{1}t)-{\text {exp}}(\Theta _{2}t)}{\Theta _{1}-\Theta _{2}} \end{bmatrix}. \end{aligned}$$When \(\Theta _{1}>\Theta _{2}\): Here are two inequalities satisfy that \(({\Theta _{1}{\text {exp}}(\Theta _{1}t)-\Theta _{2}{\text {exp}}(\Theta _{2}t)})/(\Theta _{1}-\Theta _{2}) < {\text {exp}}(\Theta _{1}t)\) and \(({\text {exp}}(\Theta _{1}t)-{\text {exp}}(\Theta _{2}t))<({\text {exp}}(\Theta _{1}t)/(\Theta _{1}-\Theta _{2}))\). Next, in the light of the above conditions:
$$\begin{aligned} \begin{aligned}&\Vert \text {exp}(Ht)W_{i}(t)\Vert _{\text {F}}\le G{\text {exp}}(\Theta _{1}t)\vert \Lambda _{i}(0)\vert ,\\&\Vert \text {exp}(Ht)\textbf{p}\Vert _{\text {F}}\le G{\text {exp}}(\Theta _{1}t). \end{aligned} \end{aligned}$$Where the parameter \(G=\frac{\sqrt{(\eta -\zeta )^{2}+1}}{\eta -\zeta }\). In addition, we can obtain the following:
$$\begin{aligned} \begin{aligned} \vert \Lambda _{i}(t)\vert \le \Vert W_{i}(t)\Vert _{\text {F}}&\le G\text {exp}(\Theta _{1}t)\vert \Lambda _{i}(0)\vert \\&\quad -\frac{G}{\Theta _{1}}\max \limits _{0<\delta <t}\vert \phi _{i}(\delta )\vert . \end{aligned} \end{aligned}$$Then, we take the limit on the residual error \(\Vert \Lambda (t)\Vert _{\text {F}}\) as
$$\begin{aligned} \begin{aligned}&\lim _{t\rightarrow \infty }\sup \Vert \Lambda (t)\Vert _{\text {F}} \\ {}&\quad \le \max \limits _{1\le i\le r+2q}\left\{ \max _{0\le \delta \le t}\vert \phi _{i}(\delta )\vert \right\} \frac{\sqrt{r+2q}G}{\zeta }. \end{aligned} \end{aligned}$$The situation of \(\Theta _{1}>\Theta _{2}\) can be roughly regarded as the same situation of \(\Theta _{1}<\Theta _{2}\), and the tedious proof steps are omitted here.
-
Under the condition of \((\eta +\zeta )^2=4\eta \zeta \). We can also get the following:
$$\begin{aligned}{} & {} \text {exp}(Ht)W_{i}(0) = \begin{bmatrix} \Lambda _{i}(0)t\Theta _{1}{\text {exp}}(\Theta _{1}t)\\ \Lambda _{i}(0)t\Theta _{1}{\text {exp}}(\Theta _{1}t)\\ \end{bmatrix}, \\{} & {} \text {exp}(Ht)\textbf{p} = \begin{bmatrix} \Theta _{1}{\text {exp}}(\Theta _{1}t)\\ t{\text {exp}}(\Theta _{1} t) \end{bmatrix}. \end{aligned}$$In this time, the parameter \(\Theta = \frac{-(\eta +\zeta )}{2}\). When there are two parameters \(\varrho \) and \(\Psi \) with positive values, the inequality is \(t{\text {exp}(\Theta t)}\sqrt{\Theta ^{2}+1} < \varrho {\text {exp}}(-\Psi t)\). Besides,
$$\begin{aligned} \begin{aligned} \vert \Lambda _{i}(t)\vert \le \Vert W_{i}(t)\Vert _{\text {F}}&\le \varrho \text {exp}(\Psi t)\vert \Lambda _{i}(0)\vert \\&\quad +\frac{\varrho }{\Psi }\max \limits _{0<\delta <t}\vert \Lambda _{i}(\delta )\vert . \end{aligned} \end{aligned}$$The conclusion is derived as
$$\begin{aligned} \begin{aligned} \lim \limits _{t \rightarrow \infty }\sup \Vert \Lambda (t)\Vert _{\text {F}} \le \max \limits _{1\le i\le r+2q}\left\{ \max _{0\le \delta \le t}\vert \phi (\delta )\vert \right\} \frac{\sqrt{r+2q}\varrho }{\Psi }. \end{aligned} \end{aligned}$$
To sum up, the residual error \(\Vert \Lambda (t)\Vert _{\text {F}}\) of the RNDAC model (10) is bounded when disturbed by bounded random noises \(\psi (t)\). The residual error upper bound \(\lim \nolimits _{t \rightarrow \infty }\Vert \Lambda (t)\Vert _{\text {F}}\) can be arbitrarily small if the design parameters \(\eta \) and \(\zeta \) are large enough.
Thus, the proof is thus completed. \(\blacksquare \)

Simulations
Experiments setup
All simulation experiments are conducted via MATLAB R2021b on a computer with Intel Core i7-12700F @2.10 GHz CPU, 64 GB memory, NVIDIA GeForce GTX 3080Ti GPU, and Windows 11 operating system. In order to realize the RNDAC model (10) and other comparison models for a fair comparison, a versatile ordinary differential equations solver “ode45” function provided in Matlab is exploited. Note that the “ode45” function is the most commonly used implementation approach for continuous-time ZNN Models [22, 41, 42] in addition more detail about this function has been introduced in Remark 1. Finally, our simulation experiments code is available on GitHub: https://github.com/cfko836/RNDAC.
Time-dependent numerical experiment
In this section, the experimental simulation is carried out in embrace of the dynamic matrix instance N(t) in the DMSR problem (1).
Experiments are conducted with the dynamic matrix instance N(t) in the DMSR problem (1), and the results are shown in Figs. 2, 3 and 4. Note that the scale parameters in RNDAC and other models for comparison are \(\zeta =10\) and \(\eta =20\). The activation functions employed in the RNDAC model (10) are constructed as
-
Power bounded adaptive function:
$$\begin{aligned} f({\Lambda }_{ij})= {\left\{ \begin{array}{ll} 2^{+}, &{} {\Lambda }_{ij} > 2_{dj}^{+}, \\ \vert {\Lambda }_{ij}\vert ^{5}{\Lambda }_{ij} + 5{\Lambda }_{ij}, &{} -2^{-}\le {\Lambda }_{ij}\le 2^{+}, \\ -2^{-}, &{} {\Lambda }_{ij} < -2^{-}, \\ \end{array}\right. } \end{aligned}$$ -
Exponential bounded adaptive function:
$$\begin{aligned} f({\Lambda }_{ij})= {\left\{ \begin{array}{ll} 2^{+}, &{} {\Lambda }_{ij} > 2_{dj}^{+}, \\ {\text {exp}}(\vert {\Lambda }_{ij}\vert ){\Lambda }_{ij} + 5{\Lambda }_{ij}, &{} -2^{-}\le {\Lambda }_{ij}\le 2^{+}, \\ -2^{-}, &{} {\Lambda }_{ij} < -2^{-}. \\ \end{array}\right. } \end{aligned}$$
Besides, the construction approach of the corresponding models for comparison are given as
-
OZNN model [32]:
$$\begin{aligned} X(t){\dot{X}}(t)+{\dot{X}}(t)X(t)=-\gamma (X^{\text {2}}(t)-N(t))+{\dot{N}}(t),\nonumber \\ \end{aligned}$$(28)where \(\gamma > 0\) is a scaling factor.
-
Modified ZNN (MZNN) model [24]:
$$\begin{aligned}{} & {} X(t){\dot{X}}(t)+{\dot{X}}(t)X(t)\nonumber \\ {}{} & {} \quad =-\gamma (X^{\text {2}}(t)-N(t)) \nonumber \\{} & {} \qquad +{\dot{N}}(t)-\upsilon \int _0^t (X^{\text {2}}(\delta )-N(\delta ))\text {d}\delta , \end{aligned}$$(29)with \(\gamma > 0\) and \(\upsilon > 0\).
-
Improved zeroing neural dynamics (IZND) model [30]:
$$\begin{aligned}{} & {} X(t){\dot{X}}(t)+{\dot{X}}(t)X(t)={\dot{N}}(t)\nonumber \\{} & {} \quad -\** \left( \left|\frac{\partial \Vert X^{\text {2}}(t)-N(t)\Vert _{\text {F}}}{\partial t}\right|\right) P_{\Pi }(X^{\text {2}}(t)-N(t)), \nonumber \\ \end{aligned}$$(30) -
RACZNN model (4) for solving the DSMR (1):
$$\begin{aligned}{} & {} X(t){\dot{X}}(t)+{\dot{X}}(t)X(t)\nonumber \\ {}{} & {} \quad =-\varepsilon (\Lambda (t))(X^{\text {2}}(t)-N(t))\nonumber \\{} & {} \qquad +{\dot{N}}(t)-\sigma (\Lambda (t))\int _0^t (X^{\text {2}}(\delta )-N(\delta ))\text {d}\delta . \end{aligned}$$(31)

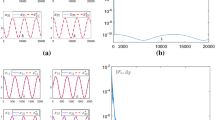
Experiments results of DMSR problem (5.2) with noise perturbed. a, d Constant noises \(\nu _{\text {c}}=[5]^{2 \times 2}\) situation. b, e Time-varying linear noises \(\nu _{\text {tv}}(t)=t\times [2]^{2 \times 2}\) situation. c, f Bounded random noises \(\nu _{\text {r}}\in [2.5, 3.5]^{2 \times 2}\) situation
RNDAC model in noise-free environment
The comparison results of the OZNN (28), MZNN (29), IZND (30), RACZNN (31) and the RNDAC model (10) to solve the DMSR problem (5.2) in the ideal environment is illustrated in Fig. 2. As can be seen in Fig. 2a, the RNDAC model (10) is able to converge to the highest accuracy, which is the order of \(10^{-7}\), within three seconds. Meanwhile, the comparison models can only converge up to \(10^{-6}\) with the cost of prolonged convergence time consumption. Noteworthy, although the IZND model (30) is shown to possess the fastest converge speed, it can only converge to order \(10^{-4}\), which is much lower than the accuracy of the RNDAC model (30). Furthermore, Fig. 2a reveals that the RNDAC model has the ability to accurately converge to a theoretical solution from any initial state.The quantitative experiment results are shown in Table 2, which detailedly records the average steady-state residual error (ASSRE) and maximal steady-state residual error (MSSRE) when different models solve the DMSR problem (1). The mathematical description of MSSRE is defined as \(\lim \nolimits _{t \rightarrow \infty }\text {sup}\Vert \Lambda (t_m)\Vert _{\text {F}}, t_m\in [t_s,t_{\text {max}}]\) and ASSRE is defined as \(\int _{t_s}^{t_{\text {max}}} \Vert \Lambda (\delta )\Vert _{\text {F}}\text {d}\delta /(t_{\text {max}}-t_s)\), where t(s) represents the length of time in seconds. As exhibited in Table 2, booting by the adaptive activation function, the RNDAC can achieve the highest accuracy compared with other advanced models. It infers that one of the biggest advantages of the RNDAC model is the high precision. In general, in the noise free situation, the RNDAC model (10) can solve the DMSR problem (1) well, showing a competitive performance.

RNDAC model in noises interference environment
In this subsection, the simulations are executed to investigate the robust performance. Figure 3 demonstrates the performance of the RNDAC model (10) and compared models when solving the DMSR problem (1) in the cases of three kinds of noises.
In the case of constant noises
First, the noises in experiments are set to \([5]^{2 \times 2}\) and injected into the model as described in (11). As shown in Fig. 3d, the norm residual error of the RNDAC model (10) proposed in this paper converges in order of \(10^{-4}\), which is more accurate to the theoretical solution of the DMSR problem (5.2) than the OZNN (28), MZNN (29), IZND (30), RACZNN (31) model. At the same time, it is also observed from Fig. 3a that the RNDAC model (10) also performs well in terms of convergence speed. Furthermore, the numerical result, in this case, is also presented in Table 2. Even under the constant noise perturb, the RNDAC model can reach order \(10^{-4}\). It is to say, the performance of the RNDAC model in terms of ASSRE and MSSRE is the best in this case.
In the case of time-varying linear noises
Under the disturbance of the time-varying linear noises \(\nu _{\text {tv}}(t)= [2]^{2 \times 2}\), the solving performance compared among the RNDAC and other models is shown in Fig. 3b, e. Obviously, when solving the time-varying linear noises perturbed DMSR problem (1), the RNDAC model (10) can stably and fast converge to the order of \(10^{-2}\) and preserve the accuracy consistently. On the aspect of OZNN (28) and IZND (30) models, their residual error increases over time and then causes failure in the solution process. Further, despite the MZNN (29) and RACZNN (31) models can eliminate the influence of part of the time-varying linear noise, the cost is longer convergence time, and the accuracy is lower than the RNDAC model (10). The results provided in Table 2 further this phenomenon.
In the case of bounded random noises
It is challenging to solve the DMSR problem (1) stably under the interference of bounded random noise. In this environment, the IZND (30) model shows the best convergence performance and reaches the order of \(10^{-3}\), which is close to the accuracy generated by the RNDAC model (10). Nonetheless, the robustness performance of the RNDAC model (10) manifests the competitiveness. Specifically, except for the IZND model (30), the RNDAC model (10) is the fastest to converge. Besides, the RNDAC model (10) is the most accurate model under the perturbs of bounded random noise. Similar conclusions can be drawn from Table 2.
Different values of hyperparameter
In this subsection, we control hyper-parameters \(\eta \) and \(\zeta \) to analyze the relationship between hyper-parameters and the robustness of the RNDAC model (10). First, it can be seen from Fig. 4a that when the parameter \(\zeta \) keeps as a fixed value, meanwhile, \(\eta \) changes lead to a change in convergence time. Specifically, the RNDAC model converges faster with \(\eta \) increase but results in more computational consumption, which is limited by the practical implementation environment. Second, when the parameter \(\eta \) is set as a fixed value, the convergence speed of the RNDAC model (10) is positively correlated with the value of \(\zeta \), which the accuracy decreases with larger \(\zeta \). In addition, according to the four Theorems mentioned in this paper, it can be obtained that the accuracy and convergence performance of the RNDAC model (10) is related to the hyper-parameters. Specifically, as the parameter \(\eta \) increases and the parameter \(\zeta \) decreases, its upper and lower bounds will be more accurate under the influence of noise.
Discussion
Summary
In general, the evolution formula and activation function is the difference between our method and previous models adopted for solving the dynamic problem. The experiment results reveal that the RNDAC maintains high accuracy and faster convergence speed in the noise-free environment since it employs the proposed adaptive activation function. On the aspect of robustness, due to adopting the noise suppression evolution formula, the solution performance of the RNDAC model demonstrates enhanced robustness compared with other models, which shows reliable solution performance. In order to manifest the difference between this paper and previous works and clarify the motivation, the highlights of this paper are listed as follows:
-
1.
The adaptive activation function design framework is proposed for the first time, which can effectively improve the solution system’s convergence speed and accuracy.
-
2.
Based on the adaptive activation function and the novel robustness evolution formula, the RNDAC model is proposed to solve the noises perturbated DMSR problem.
-
3.
Four theorems and proof process is provided for comprehensive analyze the performance of the RNDAC model.
Limitations
The limitations of the proposed model are two aspects. First, the improvement of the RNDAC model relies on the adaptive activation function, thereby needing the procedure of additional hyperparameters adjustment, which hinders the flexibility of model deployment. Second, for the way to adjust the hyperparameter and activation function to improve the RNDAN model’s performance, we have only empirically validated it in the simulation part.
Conclusions
This paper proposes a novel adaptive activation function design and constructs a framework for improving the solution model’s performance. Based on this framework and the robust evolution formula, the robust neural dynamic with adaptive coefficient (RDNAC) model is presented and applied to solving the dynamic matrix square root (DMSR) problem. Unlike the existing activation function is usually realized by a monotonically increasing odd function, our method relaxes the limitation and integrates residual information for each component to accelerate convergence. Theoretically, four theorems and proof processes are presented, which show the RNDAC model globally converges to zero in noise free and can preserve reliable solution performance in noises injected environments. Then, experiments with three metrics considered (convergence time, MSSRE, and ASSRE) are conducted to validate the effectiveness of the proposed model and investigate why it works in dealing with the problem. Under a noise free environment, our proposed model can achieve higher accuracy with faster convergence speed than previous methods. On the other hand, the RNDAC model can robustness solve the DMSR problem even perturbed by various noises, which guarantees the reliability concerns on the real-time solving system.
Considering the limitations of this paper, our future work will denote simplifying the process redundant adjustment procedure in activation functions by exploiting the dynamic bounds method. After that, we will conduct a comprehensive theoretical analysis to investigate the better implementation scheme of the proposed adaptive activation function for guiding the design and realization of the RNDAC model. Besides, we will extend the RNDAC model to the complex-valued and look for practical applications such as localization systems, filter design, algorithmic platforms for UAVs, etc.
References
Yu S, Fan X, Chau T, Trinh H, Nahavandi S (2021) Square-root sigma-point filtering approach to state estimation for wind turbine generators in interconnected energy systems. IEEE Sens J 15(2):1557–1566
Sun Z, Wang G, ** L, Cheng C, Zhang B, Yu J (2022) Noise-suppressing zeroing neural network for online solving time-varying matrix square roots problems: a control-theoretic approach. Expert Syst Appl 92:116272
Dietzen T, Doclo S, Moonen M, Waterschoot T (2020) Square root-based multi-source early PSD estimation and recursive RETF update in reverberant environments by means of the orthogonal procrustes problem. IEEE/ACM Trans Audio Speech Lang Process 28:755–769
Shen C, Zhang Y, Guo X, Chen X, Cao H, Tang J, Li J, Liu J (2021) Seamless GPS/inertial navigation system based on self-learning square-root cubature Kalman filter. IEEE Trans Ind Electron 68(1):499–508
Huang H, Fu D, Zhang J, **ao X, Wang G, Liao S (2020) Modified newton integration neural algorithm for solving the multi-linear M-tensor equation. Appl Soft Comput 96:1568–4946
Huang H, Fu D, Wang G, ** L, Liao S, Wang H (2020) Modified newton integration algorithm with noise suppression for online dynamic nonlinear optimization. Numer Algorithms 87(2):575–599
Sun Z, Shi T, ** L, Zhang B, Pang Z, Yu J (2021) Discrete-time zeroing neural network of O(\(\tau \)4) pattern for online time-varying nonlinear optimization: application to manipulator motion generation. J Franklin Inst Appl Math Comput 358:7203–7220
Xu X, Liu S, Zhang N, **ao G, Wu S (2022) Channel exchange and adversarial learning guided cross-modal person re-identification. Knowl Based Syst 257(5):109883
**ng H, **ao Z, Qu R, Zhu Z, Zhao B (2022) An efficient federated distillation learning system for multitask time series classification. IEEE Trans Instrum Meas 71:1–12
**ao X, Jiang C, Lu H, ** L, Liu D, Huang H, Pan Y (2020) A parallel computing method based on zeroing neural networks for time-varying complex-valued matrix Moore–Penrose inversion. Inf Sci 524:216–228
Jia L, **ao L, Dai J, Cao Y (2021) A novel fuzzy-power zeroing neural network model for time-variant matrix Moore–Penrose inversion with guaranteed performance. IEEE Trans Fuzzy Syst 29(9):2603–2611
Zhang Y, Ling Y, Yang M, Yang S, Zhang Z (2021) Inverse-free discrete ZNN models solving for future matrix pseudoinverse via combination of extrapolation and ZeaD formulas. IEEE Trans Neural Netw Learn Syst 32(6):2663–2675
Katsikis VN, Mourtas SD, Stanimirovic PS, Zhang Y (2022) Solving complex-valued time-varying linear matrix equations via QR decomposition with applications to robotic motion tracking and on angle-of-arrival localization. IEEE Trans Neural Netw Learn Syst 33(8):3415–3424
Qiu B, Guo J, Li X, Zhang Z, Zhang Y (2022) Discrete-time advanced zeroing neurodynamic algorithm applied to future equality-constrained nonlinear optimization with various noises. IEEE Trans Cybern 52(5):3539–3552
** L, Liu Y, Lu H, Zhang Z (2021) Saturation allows neural dynamics to be applied to linear equations and perturbed time-dependent systems of robotics. IEEE Trans Ind Electron 68(10):9844–9854
Liao S, Liu J, Qi Y, Huang H, Zheng R, **ao X (2022) An adaptive gradient neural network to solve dynamic linear matrix equations. IEEE Trans Syst Man Cybern Syst 52(9):5913–5924
Qi Y, ** L, Luo X, Shi Y, Liu M (2022) Robust k-WTA network generation, analysis, and applications to multiagent coordination. IEEE Trans Cybern 52(8): 8515–8527
Guo D, Li S, Stanimirovic P (2020) Analysis and application of modified ZNN design with robustness against harmonic noise. IEEE Trans Ind Inform 16(7):4627–4638
Liu K, Liu Y, Zhang Y, Wei L, Sun Z, ** L (2021) Five-step discrete-time noise-tolerant zeroing neural network model for time-varying matrix inversion: application to manipulator motion generation. Eng Appl Artif Intell 103:104306
Sun Z, Li F, Duan X, ** L, Lian Y, Liu S, Liu K (2021) A novel adaptive iterative learning control approach and human-in-the-loop control pattern for lower limb rehabilitation robot in disturbances environment. Auton Robot 45:595–610
Jiang C, ** L, **ao X (2021) Residual-based adaptive coefficient and noise-immunity ZNN for perturbed time-dependent quadratic minimization. ar**v preprint ar**v:2112.01773
Jiang C, **ao X, Liu D, Huang H, **ao H, Lu H (2021) Nonconvex and bound constraint zeroing neural network for solving time-varying complex-valued quadratic programming problem. IEEE Trans Ind Inform 17(10):6864–6874
Liufu Y, ** L, Xu J, **ao X, Fu D (2022) Reformative noise-immune neural network for equality-constrained optimization applied to image target detection. IEEE Trans Emerg Top Comput 10(2):973–984
** L, Zhang Y, Li S, Zhang Y (2016) Modified ZNN for time-varying quadratic programming with inherent tolerance to noises and its application to kinematic redundancy resolution of robot manipulators. IEEE Trans Ind Electron 63(11):6978–6988
Chen D, Zhang Y (2018) Robust zeroing neural-dynamics and its time-varying disturbances suppression model applied to mobile robot manipulators. IEEE Trans Neural Netw Learn Syst 29(9):4385–4397
**ao L, Dai J, ** L, Li W, Li S, Hou J (2021) A noise-enduring and finite-time zeroing neural network for equality-constrained time-varying nonlinear optimization. IEEE Trans Syst Man Cybern Syst 51(8):4729–4740
Li W (2020) Design and analysis of a novel finite-time convergent and noise-tolerant recurrent neural network for time-variant matrix inversion. IEEE Trans Syst Man Cybern Syst 50(11):4362–4376
Kong Y, Jiang Y, Li X, Lei J (2022) A time-specified zeroing neural network for quadratic programming with its redundant manipulator application. IEEE Trans Power Electron 69(5):4977–4987
**ao L, Liu S, Wang X, He Y, Jia L, Xu Y (2022) Zeroing neural networks for dynamic quaternion matrix inversion. IEEE Trans Ind Inform 18(3):1562–1571
Song Z, Lu Z, Wu J, **ao X, Wang G Improved ZND model for solving dynamic linear complex matrix equation and its application. Neural Comput Appl. https://doi.org/10.1007/s00521-022-07581-y (in press)
Wei L, ** L, Luo X (2022) Noise-suppressing neural dynamics for time-dependent constrained nonlinear optimization with applications. IEEE Trans Syst Man Cybern Syst 52(10):6139–6150
**ao X, Fu D, Wang G, Liao S, Qi Y, Huang H, ** L (2020) Two neural dynamics approaches for computing system of time-varying nonlinear equations. Neurocomputing 394:84–94
Qi W, Zong G, Zheng W (2021) Adaptive event-triggered SMC for stochastic switching systems with Semi-Markov process and application to boost converter circuit model. IEEE Trans Circuits Syst I Regul Pap 68(2):786–796
Su W, Niu B, Wang H, Qi W (2021) Adaptive neural network asymptotic tracking control for a class of stochastic nonlinear systems with unknown control gains and full state constraints. Int J Adapt Control Signal Process 35(10):2007–2024
Wang X, Jiang K, Zhang G, Niu B (2021) Adaptive output-feedback neural tracking control for uncertain switched MIMO nonlinear systems with time delays. Int J Syst Sci 52(13):2813–2830
** L, Yan J, Du X, **ao X, Fu D (2020) RNN for solving time-variant generalized Sylvester equation with applications to robots and acoustic source localization. IEEE Trans Ind Inform 16(10):6359–6369
Zhang D, Lee TC, Sun XM, Wu Y (2020) Practical regulation of nonholonomic systems using virtual trajectories and Lasalle invariance principle. IEEE Trans Syst Man Cybern Syst 50(5):1833–1839
Qin Y, Cao M, Anderson B (2020) Lyapunov criterion for stochastic systems and its applications in distributed computation. IEEE Trans Autom Control 65(2):546–560
Rosenvasser YN, Polyakov EY, Lampe B (1999) Application of Laplace transformation for digital redesign of continuous control systems. lIEEE Trans Autom Control 44(4):883–886
Packard A, Helwig M (1989) Relating the gap and graph metrics via the triangle inequality. IEEE Trans Autom Control 34(12):1296–1297
Zhang Y, Li W, Guo D, Ke Z (2013) Different Zhang functions leading to different ZNN models illustrated via time-varying matrix square roots finding. Expert Syst Appl 40(11):4393–4403
Sun Z, Shi T, Wei L, Sun LY, Liu K, ** L (2020) Noise-suppressing zeroing neural network for online solving time-varying nonlinear optimization problem: a control-based approach. Neural Comput Appl 32:11505–11520
Funding
This work was supported in part by the National Natural Science Foundation of China under Grant 62272109, in part by Natural Science Foundation of Guangdong Province, China under Grant 2021A1515011847, in part by the Special Project in Key Fields of Universities in Department of Education of Guangdong Province under Grant 2019KZDZX1036, in part by the Key Lab of Digital Signal and Image Processing of Guangdong Province under Grant 2019GDDSIPL-01, in part by the Demonstration Bases for Joint Training of Postgraduates of Department of Education of Guangdong Province under Grant 202205, in part by Postgraduate Education Innovation Plan Project of Guangdong Ocean University under Grant 202214, in part by the Innovation and Entrepreneurship Training Program for College Students of Guangdong Ocean
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
We wish to draw the attention of the Editor to the following facts which may be considered as potential conflicts of interest and to significant financial contributions to this work. We confirm that the manuscript has been read and approved by all named authors and that there are no other persons who satisfied the criteria for authorship but are not listed. We further confirm that the other of authors listed in the manuscript has been approved by all of us and that the second author prepared the revision information letter and addressed most of the comments. We confirm that we have given due consideration to the protection of intellectual property associated with this work and that there are no impediments to publication, including the timing of publication, with respect to intellectual property. In so doing we confirm that we have followed the regulations of our institutions concerning intellectual property. We understand that the Corresponding Author is the sole contact for the Editorial process (including Editorial Manager and direct communications with the office ). He is responsible for communicating with the other authors about progress, submissions of revision and final approve of proof. We confirm that we have provided a current email address which is accessible by the Corresponding Author and which has been configured to accept email from the Complex and Intelligent Systems Editorial Office.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A Definition of notation
Appendix A Definition of notation
Definition of notation | |
|---|---|
\(^{\text {T}}\) | Transpose operation |
\(^{\dagger }\) | Pseudoinverse operation |
\(\Vert \cdot \Vert _{\text {F}}\) | Frobenius norm of matrix |
Abbreviations | |
RNDAC | Robust neural dynamics with adaptive coefficient |
DMSR | Dynamic matrix square root |
NF | Noises free |
CN | Constant noises |
TVN | Time-varying linear noises |
RN | Random noises |
ASSRE | Average steady-state residual error |
MSSRE | Maximal steady-state residual error |
Variables | |
N(t) | Dynamic coefficient matrix and \(N(t)\in {\mathbb {R}}^{n\times n}\) |
X(t) | Real-time solution matrix and \(X(t)\in {\mathbb {R}}^{n\times n}\) |
\(\Lambda (t)\) | Error function |
\(\nu (t)\) | Noises perturbation item |
\(\gamma \) | Scale factor and \(\gamma >0\) |
\(\zeta \) | Scale factor and \(\gamma >0\) |
\(\eta \) | Feedback factor and \(\eta >0\) |
\(\kappa (\cdot )\) | Adaptive control activation function |
\(\varphi (\cdot )\) | Adaptive feedback activation function |
\(\varpi \) | The parameter in activation function for control convergence speed and \(\varpi >1\) |
\(\iota \) | The parameter in activation function for control convergence speed and \(\iota >1\) |
\(\varsigma ^{+}\) | Upper bound of the adaptive activation function |
\(\varsigma ^{-}\) | Lower bound of the adaptive activation function |
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jiang, C., Wu, C., **ao, X. et al. Robust neural dynamics with adaptive coefficient applied to solve the dynamic matrix square root. Complex Intell. Syst. 9, 4213–4226 (2023). https://doi.org/10.1007/s40747-022-00954-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40747-022-00954-9