
Abstract
Numerous approaches and inputs for nonlinear finite element analysis used for modeling reinforced concrete systems under cyclic loads have been outlined. Practitioners usually take into account a number of significant factors when modeling, for example deciding upon the constitutive relations, the connection among concrete and steel reinforcement, and the mesh sensitivities, in order to accurately simulate the nonlinear response of reinforced concrete under cyclic loads. Therefore, it is essential to thoroughly assess popular modeling approaches and develop a reliable modeling approach with reliability, stability, and consistency. A modeling technique and practical guidelines for nonlinear finite element analysis of reinforced concrete frames subjected to cyclic loading are described in this study, taking into account the influence of parameters such as dilation angle, stiffness recovery, friction coefficient, and mesh sizes. The hysteretic force–displacement behavior and load-carrying capacity of reinforced concrete frames subjected to cyclic loading have been compared using numerical and experimental curves. Discrete fracture paths are specified in the model’s geometry to achieve an accurate depiction of the stress distribution and an adequate fit of the hysteretic behavior. The proposed modeling approach provides a precise representation of the stress distribution and hysteretic behavior while kee** computational costs reasonable.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Earthquakes that have occurred in recent years have shown that structures built before modern seismic codes should be analyzed according to the new codes [1]. Extensive experimental and analytical research has been conducted to better understand the seismic performance of reinforced concrete (RC) frames under various conditions. [2,3,4]. Simulation of RC structures and their materials under cyclic loading is still a major challenge for accurate modeling [5].
Finite element analysis (FE) is a popular method in earthquake and civil engineering for analyzing load-bearing elements and RC frames, as well as for analyzing systems with numerous degrees of freedom that describe the structural configuration of constructions. On the other hand, the simulation and analysis of structural elements created with a combination of different materials under seismic loads can be complex and challenging [6,7,8].
Nonlinear FE analysis of RC members has regularly obtained high agreement between numerical and experimental results, and it is also useful for examining the nonlinear behavior of RC structures and undertaking parametric analyses at a lower cost than experimental tests [9,10,11]. The modeling of composite and reinforced concrete structures through finite element analysis is an important issue because of the nonuniform material properties of concrete in a particular and complex interaction between concrete and rebar [12]. Contrary to steel, concrete exhibits nonlinear behavior under compression almost from the beginning. It also degrades faster when subjected to tensile forces. Therefore, examining the behavior of concrete in a structure with advanced strain, the right concept of concrete failure is critical.
Although the modeling of concrete behavior is more stringent, the compressive behavior is defined by a post-peak attenuation curve, which is impacted by characteristics such as concrete confinement [13]. Furthermore, tensile behavior usually includes an elastic phase up to the tensile strength of the concrete, subsequently followed by concrete failure. There are two modeling approaches widely used to simulate concrete behavior in finite element modeling. In numerical studies, the smeared cracking approach is commonly used to recreate the monotonic response of RC frames [14]. However, this constitutive model is not able to adequately represent the behavior of concrete subjected to cyclic loading. The discrete cracking approach, in which the crack is visually simulated in the mechanical model, is an option for simulating crack opening in concrete [15, 16].
The numerical modeling approach for the behavior of RC frames under monotonic and cyclic loading and the sensitivity of the effective concrete parameters to FE modeling has been studied by many researchers. Blasi et al. [17] suggested a hybrid modeling technique for studying the RC frame under cyclic loading, evaluating the hysteretic force–displacement response and comparing numerical and experimental results. This approach improved the accuracy of hysteretic loop simulations, which define the lateral behavior of reinforced concrete elements. Cai et al. [18] investigated experimental and simulation approaches to explore the seismic behaviors of different composite RC frames. In addition, a new finite element model (FE) was presented, and its correctness was validated using experimental findings. The failure mechanisms of RC frames were examined and compared according to the proposed FE model. The result was that the initial stiffness and ultimate loading became very similar, indicating that the proposed model FE accurately simulates the hysteretic behavior of frames. López-Almansa et al. [19] investigated the capacity of basic and sophisticated numerical models to simulate the nonlinear monotonic behavior of reinforced concrete frames, as well as to explain damage plasticity models and their implementation in the FEM program ABAQUS. To improve modeling of the nonlinear behavior of the RC frame, three types of models were proposed: lumped plasticity models, distributed plasticity models, and continuum mechanics-based models. The continuum mechanics model with CDPM predicted the general behavior of the frame better during the experiment. This model predicted all phases extremely well, including “initial stiffness, softening after the first cracks, final force, ductility phase, and collapse phase” with a difference of (0.3%) from the experimental capacity. Folhento et al. [20] proposed two approaches for obtaining the nonlinear cyclic behavior of RC frames: the structural plastic hinge model (PHM) and the fiber model (FM). Raza et al. [21] investigated the load-carrying capacity of reinforced concrete members using the concrete damaged plasticity (CDP) model in ABAQUS. Calibration of the CDP parameters, i.e., concrete area (Ac), concrete compressive strength (fc′), and ratio of longitudinal reinforcement (ρl) to transverse reinforcement (ρt), significantly affected the bearing capacity results.
In the simulation, once the tensile strength or crack energy is reached, discrete cracks appear in the mesh, which can be clearly identified in postprocessing. These approaches can be applied in various analytical simulations to reproduce the effects of crack development in concrete members. However, in many cases, they cause convergence problems and lead to an interruption of the analysis. Furthermore, while dealing with the cyclic behavior of RC frames in numerical simulation, the impacts of crack opening and closure in the mechanical model should be taken into account in the geometrical model. For the correct simulation, the effect of parameters such as the place of cracking surfaces, the values of contact parameters, and effective concrete parameters should be determined carefully. However, the crack surfaces are predefined in the numerical model by dividing the geometry into different macroblocks. Along the crack faces, contact laws are defined via tangential and normal factors to simulate crack opening and closing, respectively. Since cyclic opening/closing is not implicit in the definition of tensile behavior, this approach allows a simpler explanation of the mechanical response of concrete. Additionally, only specified surfaces are defined for the contact laws since the cracking paths were determined in geometry. For practical application, it is also necessary to identify the key material properties and analysis parameters that affect the outcome of the FE simulation, the sensitivity of these parameters for the numerical results, and recommendations for estimating such parameters when experimental data are not available.
The present study aimed to meet these needs. For this purpose, three RC frame specimens [22,23,24] were considered, nonlinear finite element analyzes were performed using ABAQUS v.6.13, and the results were compared with experimental data. The sensitivity of the effective concrete parameters and various modeling considerations was evaluated. Practical recommendations are also provided for modeling crack surfaces and contact laws for the hysteretic response of RC frames exposed to cyclic lateral loading.
2 Summary of Simulated Experimental Tests
First, Arslan et al. [1] performed experimental tests on a one-bay, one-story reinforced concrete frame to validate the numerical model. Figure 1 depicts the dimension and reinforcement details of the tested frame (named the normal strength concrete frame), with structural and foundation measurements in cm and rebar diameters in mm. The concrete compressive strength and elasticity modulus were determined to be 25.14 MPa and 28,670 MPa, respectively, and a cyclic lateral load was applied on top of the test frame. The initial damage in the test was flexural cracking at the bottom of the columns.

Description of the NSCF [22]
Similarly, several experimental data from the literature were used to run the numerical simulation to check the proposed model’s accuracy in predicting the cyclic behavior of RC frames. The second experimental reinforced concrete frame (named bare frame-BF) simulated in this study, carried out by Kim and Yu [23], is shown in Fig. 2. The compressive strength of the concrete used in the RC bare frame was determined to be 35.884 MPa. The cross-sections of the columns and beams measured \(300\times 300\) mm and \(300\times 350\) mm, respectively. The beam longitudinal reinforcement is symmetric, with four top and four bottom 16-mm bars. For column reinforcement, 16-mm bars were employed to comply with the capacity design concept. The transverse reinforcement of the columns and beam was made out of 10-mm stirrups spaced 150 mm apart in all components. The experimental test was performed by applying a cyclic load at the cross-section of the beam. The loading technique involved repeatedly applying increasing amounts of displacement amplitude to the specimen until the failure. Two fully reversed cycles were run for each load stage. Flexure failure occurred in BF under cyclic loads. The maximum force on the positive side is 203 kN and on the negative side is 199 kN, which are quite close. Furthermore, the Maximum drifts were 5% and 4.9% in the positive and negative directions, respectively, when the force was reduced to 80% of its maximum.

Description of the BF tested by Kim and Yu [23]
Furthermore, the third reinforced concrete frame (called moment-resistant frame-MRF) was chosen for simulation, and the experiments carried out by Kheyroddin et al. [24] are shown in Fig. 3. The frame length span was 160 cm, and the frame height including foundations was calculated to be 140 cm. The beam cross-section is \(15\times 20\) cm, and the column cross-section is \(20\times 20\) cm. Two bars with a diameter of 8 mm at the top and two bars with a diameter of 10 mm at the bottom were utilized as beam reinforcing bars. 12-mm bars was used for column reinforcement. To minimize shear damage to the samples, the stirrups were placed compressively in the beam and column. 6-mm-diameter bars were used for transverse reinforcement. The experiment’s average compressive strength was 24.8 Mpa.

The MRF specimen specifications tested by Kheyroddin et al. [24]
3 Finite Element Model
To conduct experimental studies in a computer environment and shed light on various researches, a computer model was constructed and tested using experimental results. The study used a well-known commercial finite element software ABAQUS, it can be used for performing different types of simulations, such as 3D static, quasistatic, or dynamic nonlinear simulations. To define the solid element (concrete), the eight-node linear brick with reduced integration (C3D8R) was used. It was intentionally chosen because it offers a solution of equal accuracy in terms of getting the right stress and strain values without using too much computational effort. This element is flexible and works well with concrete. Another advantage of employing this element is that it can lower mesh sensitivity throughout the course of repetition. To reinforce the bars, a specific type of truss element called T3D2 was used. This truss element had two nodes and a 3D wire. To make sure that concrete adheres to the reinforcement, the embedded constraint option was used. The transitory degrees of freedom will be automatically reduced after the reinforcing bars are embedded since they have combined with concrete nodes. Additionally, the surface contacts between the beam and column were considered by using tie constraints. It is known that reinforced concrete recovers stiffness even if tensile cracking and stiffness reduction occur on the tension side. This occurs when cracks close due to stress moving to the compression side. To simulate the crack closing process, stiffness recovery coefficients of \({w}_{t}\) and \({w}_{c}\) are set for finite element analysis. In this study, due to cyclic loading conditions, the stiffness recovery coefficients \({w}_{t}\) and \({w}_{c}\) are calibrated between 0 and 1 to achieve a better simulation result. Furthermore, the reaction of reinforced concrete structural elements under cyclic loading is highly influenced by cracking in the concrete, which affects its energy dissipation capacity. The pinching effect that determines the flexural response of an RC frame is caused by the cyclic opening and closing of cracks, which leads in a significant decrease in stiffness during the load-inversion phase due to crack closure. ABAQUS software cannot accurately simulate the crack closure process because early compressive stiffness restoration occurs during the unloading period when tensile deformation is significant. Therefore, to simulate the pinching effect, special predefined cracks are considered in the geometry of the models according to the flexural cracks that occurred in the experimental specimen under cyclic loading. As mentioned above, in this study, three different RC frames named finite element models 1 (FEM1), 2 (FEM2), and 3 (FEM3) were simulated according to the experimental test. A damage plasticity model included in the software defines the mechanical behavior of concrete. The following section describes concrete modeling, the interaction among concrete and steel reinforcement interface, and the concrete macroblock interface in detail.
4 Concrete Models
A 3D continuum, plasticity-based damage model is used to simulate the concrete material. The concrete-damaged plasticity (CDP) model is capable of simulating concrete in a variety of components, including trusses, beams, shells, and, particularly the solids. The definition of CDP includes concrete plasticity, compressive behavior, tensile behavior, and damage evolution of the stiffness.
4.1 Concrete Plasticity
The dilation angle (φ), the eccentricity factor (ε) related to the flow potential given by the Drucker–Prager hyperbolic function, the ratio of the initial equibiaxial to uniaxial compressive strength (\({f}_{b}{\prime}/{f}_{c}{\prime}\)), the shape factor of the yielding surface in the deviatory plane (Kc), and the viscosity parameter (µ) are required to define the concrete plasticity model. All of these parameter values were obtained through out calibration. The dilation angle (φ) value is defined using the validation mentioned in Sect. 4.1. The recommended values of eccentricity (ε) and yield shape surface (Kc) are 0.1 and 2/3, respectively. Following equations were also used to calculate the ratio of compressive stress in the biaxial state to compressive stress in the uniaxial state (\({f}_{b}{\prime}/{f}_{c}{\prime}\)) and the second stress invariant parameter Eqs. (1) and (2) [21, 25]. The viscosity parameter (µ) was set to 0.001 in this study.
4.2 Concrete Compressive Behavior
To precisely quantify the compressive reaction of concrete under cyclic loading, the well-consolidated and generally used formulation presented by Carreira and Chu [26] is largely recognized by most researchers as given [27,28,29].
where \({f}_{c}{\prime}\) specified concrete compressive strength; \({\upsigma }_{{\text{c}}}\) concrete stress in general; \(n\) material parameter that depends on the shape of the stress–strain curve; \(a=3.5{\left(12.4-0.0166{f}_{c}^{\mathrm{^{\prime}}}\right)}^{-0.46}\) axial concrete strain in general; \({\varepsilon }_{c}^{\mathrm{^{\prime}}}\) strain corresponding to the maximum concrete compressive strength; \({E}_{c}\) tangent modulus of concrete elasticity; \({E}_{{\text{sec}}}\) secant modulus of elasticity.
4.3 Concrete Tensile Behavior
As illustrated in Fig. 4a, the tensile behavior of concrete is assumed to have a linear elastic stress strain relationship before the concrete reaches tensile strength. Because the ultimate tensile strength (\({f}_{ct}\)) of the tested RC frames is not mentioned in the reference experimental studies, it is calculated in MPa by using Eq. (11) according to the CEB-FIB 2010 model code [30].

Concrete post-peak behavior in compression and tension is known to be meshing sensitive. To avoid excessive mesh sensitivity, the tension softening behavior should be specified as a stress-crack opening displacement graph (\({f}_{ct}-w\)). Brittle fracture is defined as the fracture energy (GF) required to open a unit area of the crack. The fracture energy (GF) for normal strength concrete, in MPa, can be calculated using Eq. (12) according to the CEB-FIB 2010 model code [30].
Three different model types for the behavior of tension softening sections following cracking have been given in the literature in terms of the stress-crack opening displacement curve: linear, bilinear, and exponential (Fig. 4). The behavior of the tension softening component after cracking is characterized in this study utilizing a bilinear post-peak tension softening model. To avoid any numerical difficulties with stress-crack opening displacement behavior, the ABAQUS algorithm mandates a lower limit on the post-cracking stress equal to 100 of the original cracking stress, σ ≥ fct/100 [31]. As a result, this limitation is taken into account when defining the post-cracking stress values in the numerical model.
4.4 Modeling of Concrete Damage
In the accepted CDP model, the evolution of concrete damage is described by a reduction in material stiffness in the post-peak region of the constitutive law. Figure 5 shows a general stress–strain relationship for concrete in uniaxial tension or compression, Eq. (13):
where \({\varepsilon }_{{\text{el}}}\),\({\varepsilon }_{{\text{in}}}\), and ε denote the elastic, inelastic, and total strains at a given stress σ.

Damage progression of the concrete
In Fig. 5, the initial elastic strain εel changes to \({\widetilde{\varepsilon }}_{{\text{el}}}\) due to the deterioration of the elastic modulus from Ec to Ecs according to Eq. (14). where d is the damage factor that must be determined to characterize the damage evolution.
In the present finite element analyses, the following tensile and compressive damage models suggested by Li et al. [33] are used for the CDP model Eqs. (15) and (16). (In the description of concrete in tension, the inelastic strain εin is sometimes referred to as the cracking strain (εcr).
Where \(\tilde{\varepsilon }_{c}^{{{\text{in}}}} = \varepsilon - \frac{{\sigma_{c} }}{{E_{c} }}\) is the inelastic compressive strain; \(\tilde{\varepsilon }_{t}^{{{\text{cr}}}} = \varepsilon - \frac{{\sigma_{t} }}{{E_{c} }}\) is the crack strain; and the limit of 0.8 is imposed to maintain a minimum stiffness of 0.2Ec. Importantly, the stated damage variable must not cause the equivalent plastic strain to decrease as the damage variable increases.
4.5 Modeling of Steel Reinforcement
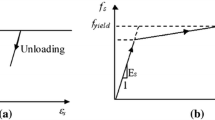
Steel reinforcement, comprising longitudinal reinforcing bars and transverse bars, is represented as a two-node truss element (T3D2) with 3D wire, with reinforcement bar effects homogenized across the concrete. Steel reinforcing material properties are specified based on the results of routine tensile tests performed in the laboratory. The mechanical behavior of steel rebars was defined using an isotropic hardening relationship, assuming a symmetric reaction in tension and compression. In addition, after the rebars reached the ultimate strength, a descending function was introduced in the ABAQUS program to obtain better simulation results. Figure 6 depicts the tensile stress–strain relationship of the NSCF model defined for the steel reinforcement in the numerical analyses, which has an elastic modulus Es = 210 GPa, an ultimate strain εsu = 12%, and a rupture strain εsmax = 23%, a yield stress fsy = 470 MPa, average tensile strength fsu = 550 MPa,

Tensile behavior of steel reinforcement for FEM1
4.6 Modeling of Interface Behavior
Several experimental and numerical studies have demonstrated that flexural fractures develop at the discontinuity surfaces marked by the transversal rebars flowing through the concrete [34]. As mentioned above, in this study, discrete crack routes are preliminarily constructed in the geometry of the model to achieve the pinching effect, as shown in Fig. 7a–c. Moreover, to reduce computational efforts, the paths are considered only in the bottom part of the column where the tensile stress is high.

Discrete crack considered in the FE models
The interaction between macroblocks is defined as a surface-to-surface contact property via normal and tangential behavior. To reduce slave surface penetration into master surfaces at limitation points, the ‘hard’ contact option is used as a pressure-over closure relationship (see Fig. 8a). It prevents the transfer of contact pressure as long as the slave and master surface nodes that do not come into contact. Furthermore, the surfaces of the two bodies are not permitted to separate in order to dominate the isotropy challenges and reduce processing time. To represent the tangential behavior of the contact interaction, the coulomb friction model is utilized (see Fig. 8b). The ABAQUS program defines two basic coulomb friction models. The friction coefficient in the default model is defined by the corresponding slip rate and contact pressure. As another option, specific static and kinetic friction coefficients can be set directly, which were used in this study. Furthermore, the friction coefficient must be set at a positive value. A friction coefficient of zero indicates that no shear forces will be generated and that the contact surfaces are free to slide [31].

Interface interaction properties: a normal behavior and b tangential behavior
5 Validation and Sensitivity Analysis
Due to the validation of the adopted models, multiple parameters and their sensitivities on the hysteresis load–deflection behavior of the RC frames were studied. To explore the effect of various parameters on the RC frames’ hysteresis load–deflection behavior, each of the following variables was investigated: (1) dilation angle (φ); (2) stiffness recovery (\({w}_{c}\)); (3) friction coefficient; and (4) mesh size.
5.1 Dilation Angle
The dilation angle is the angle of internal friction of the material and one of the parameters that characterize the performance of concrete under compound stress. Additionally, this parameter is associated with the growth of the mechanisms of cracking that suffer the concrete during the inelastic period. Corresponding to the ABAQUS user’s manual (2016), the dilation angle can affect the plastic behavior for the potential function. Kupfer et al. [35] used a dilation of approximately 25° biaxial compressive failure with experimental curves. Genikomsou and Polak [36] conducted a parametric study for dilation angles ranging from 20° to 42°. Moreover, Mathern et al. [37] recommended dilation angles between 0° and 56.3°. The effect of the dilation angle remains an open issue. The sensitivity of the dilation angle for FEM1, FEM2, and FEM3 models has been studied against the experimental tests.
To investigate the optimum value of the dilation angle, several values were suggested comprising 10°, 20°, 30°, and 40°. The FE result shows that a suitable choice with rapid convergence and a fair response comparable to the experimental result was 20° ≤ φ ≤ 30° angle. On the other hand, a dilation angle of φ = 20 resulted in the best fit between the simulated and the experimental results of FEM1 and FEM2, and φ = 30° was more suitable for the FEM3 model (see Fig. 9a–c). Generally, 20° ≤ φ ≤ 30° proved to be an acceptable range since the projected hysteresis load deflection curves converged to similar flexural responses and closely matched the actual response. However, a lower value of the dilation angle (φ ≤ 10°) caused an increase in flexural response and decreased resistance (maximum load). In contrast, a higher dilation angle (φ ≥ 40°) caused increases in the maximum strength. Table 1 shows the influence of the dilation angle on the hysteretic response and maximum load of the FE models against the experimental test. Additionally, when φ = 10°, φ = 20°, and φ = 30°, there is no significant effect on the initial stiffness of the FE models, while when the value is higher than this range (φ = 40°), the stiffness of the numerical model begins to increase with the dilation angle. As shown in Fig. 9, the dilation angle variation can affect the global response of the hysteretic loop by different shapes when comparing numerical and experimental responses.


Effect of different dilation angles for FEM1, FEM2, and FEM3 models for cyclic loading
Overall, the choice of dilation angle affected the numerical results, but the effects may be insignificant at a dilation angle of 20 to 30°. In agreement with this study and the results of previous studies [9, 11], the dilation angle of 20° ≤ φ ≤ 30° was validated and recommended for modeling similar RC frames subjected to cyclic lateral loads.
5.2 Stiffness Recovery
Stiffness recovery is an important feature of the mechanical reaction of concrete under cyclic loads. Stiffness recovery through the specification of the stiffness recovery factors (\({w}_{c} {\text{and}} {w}_{t}\)) can be considered in the concrete damage plasticity model, especially when concrete is tested under cyclic loading. The default value of the stiffness recovery factor in ABAQUS software is wt = 0 and wc = 1. The material regains full stiffness with no damage due to the unit compression recovery factor wc. The default of stiffness recovery is shown by zero values of wc. However, due to already created cracks, limited or no tensile stiffness can be predicted to recover during tension loading. Furthermore, as the load transitions from tension to compression, compressive stiffness recovers, but tensile stiffness does not. As shown in Fig. 10, when the load moves from compression to tension (wt = 0) there is no recovery, and wt = 1 represents complete recovery as the load shifts from tension to compression [37]. In this study, due to cyclic loading conditions, the sensitivity of the stiffness recovery factor was calibrated among (0–1) to achieve the optimum value against experimental tests. When wc = 0.2, wc = 0.5, and wc = 0.3 for FEM1, FEM2, and FEM3, respectively, better matching of experimental data is achieved with regard to both strength and stiffness. For all three models, the default value of wt was considered. As shown in Fig. 11, when the stiffness recovery (wc) approached zero, the stiffness and ultimate strength of the FE models decreased. In contrast, when the stiffness recovery factor reaches approximately 1, the strength and stiffness of the FE models increase. Furthermore, the stiffness recovery factor was discovered to have a significant influence on the pinching effect. For ease of job and better conception of the result, the increasing and decreasing percentages of the maximum strength of the FE model against the experimental test are shown in Table 2 for FEM1, FEM2, and FEM3.

Concrete stress–strain relation with loading and unloading


Effect of stiffness recovery factor for on validated models
5.3 Friction Coefficient
As previously stated, discrete crack patterns are defined in the geometry in this work to achieve the pinching effect. However, the geometry of concrete members (columns) was separated into various macroblocks, and the surface-to-surface contact properties via normal and tangential behavior were set between macroblocks. In normal behavior, the ‘hard’ contact option and static-kinetic friction coefficients are set in tangential behavior. The sensitivity of the friction coefficient has been calibrated to achieve the best result for the numerical model.
In the FEM1 model, a 0.02 friction coefficient has shown the optimum result against the experimental test, while the friction coefficient less than 0.02 yielded converging load–deflection curves (hysteresis curve) of the numerical model that has uncompromised results with the experimental test. Furthermore, when the friction coefficient approximated zero (0.001), the model featured a lower stiffness due to free sliding. A higher value of the friction coefficient (0.1) affects the global response of the cycles and elastic stiffness of FEM1, as demonstrated by the various shapes of the hysteretic loops when comparing numerical and experimental responses (see Fig. 12a). Variations in the friction coefficient value have little effect on the ultimate strength of the FEM1 models.

Effect of different values of friction coefficient for numerical models
In the FEM2 model, a friction coefficient of 0.04 has shown the optimum result compared to the experimental curve (see Fig. 12b). In the maximum strength value, a good agreement was also obtained, with a difference of (− 1.28%) between the numerical and experimental data (Table 3). Furthermore, when the friction coefficient factor approximated zero (0.001), the model featured a lower elastic stiffness due to free sliding, unlike the higher value of the friction coefficient (0.1), which caused an increase in elastic stiffness. Last, a different value of the friction coefficient factor affected the global response of the hysteretic loops, and values higher and lower than 0.04 led to a significant increase in the maximum strength with respect to the experimental data. Overall, the computational results were affected by the choice of friction coefficient factor, but the increase in maximum strength at lower and higher values than the reference value was connected to the characteristics of the experimental specimen and model meshing sensitivity. Figure 12c presents a comparison between the experimental test and the hysteretic response of FEM3. In comparison with the experimental result, the maximum strength obtained using FEM3 per 0.1 value of friction coefficient factor increased by 4.27%. At friction coefficient of 0.01 and 0.001, the increase in maximum strength was observed to be 9.3% and 8.33% compared to the experimental test, respectively (Table 3). Additionally, when the value of the friction coefficient was approximately zero (0.001), a lower elastic stiffness was obtained, and with a higher value of the friction coefficient (0.1), an increase was observed in elastic stiffness. However, the hysteretic response of FEM3 with a 0.01 friction coefficient factor is a satisfactory simulation compared to the experimental curve.
5.4 Mesh Sensitivity
Systematic mesh sensitivity was done on three RC frame models with mesh sizes ranging from 80 to 175 mm to evaluate the influence of mesh size. Figure 13 depicts the impact of mesh size on the load–deflection response (hysteretic response). The numerical models showed different results against mesh sensitivity. Multiple mesh sensitivity studies revealed that the most feasible mesh sizes for FEM1, FEM2, and FEM3 were 125 \(\times \) 125 mm, 100 \(\times \) 125 mm, and 100 \(\times \) 100 mm, respectively, which specify the reference FE models. Using a smaller mesh size than the reference models results in a considerable reduction in the ultimate strength and an increase in the elastic stiffness of the backbone curve in comparison with the experimental result. Additionally, at smaller mesh sizes, the effect of pinching is observed in the early cycles of the hysteretic response; however, this effect diminished in the last cycles. In contrast, for the larger meshes, an increase in the maximum strength and a decrease in the elastic stiffness were observed in the FE models compared to the experimental tests. Table 4 indicates the increase and decreasing percentage of the maximum strength of the FE model against the experimental data. As shown in Fig. 13, when the mesh sizes are 175, 175, and 140 for FEM1, FEM2, and FEM3, respectively, unreasonable variation is observed in the hysteresis loops of the numerical models due to the massive meshing, which leads to fewer contact surface nodes between macroblocks. On the other hand, massive meshing caused fewer contact surface nodes, which led to excessive sliding in two bodies (macroblocks), which was clearly reflected in the hysteresis loops. Additionally, the FE models with massive meshing (175, 175, and 140 for FEM1, FEM2, and FEM3, respectively) do not match the unloading branch’s envelope curve and slope. Because the FE reloading branches have zero stiffness, FE models are unable to account for the increase in reloading stiffness (as observed in the experimental curve) until the maximum rotation is reached in the preceding cycle, with lower dissipated energy than the experimental test.


The comparison results of the analyzed models for different mesh sizes
6 Conclusions
A number of numerical investigations of reinforced concrete element seismic behavior revealed the difficulty of effectively modeling the impacts of cyclic fractures opening and closing in concrete. Mechanical simulations of the concrete tensile response for various finite element applications allow for an accurate representation of the crack opening procedure; however, this is at the expense of high computational requirements. Additionally, using the concrete damage plasticity model highlights a considerable discrepancy between the behavior of RC members when subjected to cyclic loading and the results gained from experiments.
The proposed modeling approach was designed to enhance the precision of simulations of hysteretic loops which determine the lateral action of RC components. For defining the mechanical response of the concrete, the concrete damage plasticity model was used and combined with a discrete cracking method by applying predefined crack paths in the region of higher values of tensile stress. To reproduce the pinching effect and get an equitable result in terms of energy dissipation, defining the bond was fundamental. Normal and tangential behavior was employed to characterize the mechanical reaction among the cracking routes to simulate cyclic crack opening and closure.
Three different RC frames were modeled to assess the impact of the simulation of the bond (with the sensitivity of friction coefficient), dilation angle, stiffness recovery factor, and meshing sensitivity on the accuracy of the fiting of the experimental hysteresis loops. Compared to the FEM2 and FEM3 models, the FEM1 model reflects better simulation results against the experimental results; however, the FEM2 and FEM3 models observed slight deviations in the hysteretic loops.
Dilation angle variation can affect the global response of the hysteretic loop. According to the FE results, 20°\(\le \varphi \le \) 30° was a reasonable option, delivering rapid convergence and a decent response equivalent to the experimental result. However, a lower dilation angle value than the indicated range resulted in an increase in flexural response and a decrease in resistance (maximum strength). Furthermore, greater values above the indicated range resulted in an excess of stiffness and ultimate strength in comparison with the experimental test.
The stiffness recovery factor was found to have a significant impact on the pinching effect and ultimate strength of the FE models. For FEM1, FEM2, and FEM3, when wc = 0.2, wc = 0.5, and wc = 0.3, respectively, the experimental results are more compatible in terms of both strength and stiffness.
The friction coefficient via tangential behavior has a direct effect on the stiffness of the hysteresis curve. A high value of this coefficient causes more stiffness, and a zero friction coefficient leads to lower stiffness due to free sliding.
Meshing is one of the fundamental parameters that directly affects the simulation results. Due to the predefined cracks in the RC members, more precision is needed for meshing, which determines the number of contact surface nodes between macroblocks. As a result, tiny meshing increases the amount of contact surface nodes and influences the finite element model’s global response. The most reasonable mesh sizes that give better results for FEM1, FEM2, and FEM3 were 125 \(\times \) 125 mm, 125 \(\times \) 100 mm, and 100 \(\times \) 100 mm, respectively. The introduction of the small meshing, rather than referring to above, led to a significant increase in the stiffness of the hysteretic loops, but a decrease was observed in the ultimate resistance, while the large meshes increased the ultimate strength.
The suggested methodology captures the test results in terms of the initial stiffness, the damage progression sequence, and the overall cracking pattern (see Fig. 14). In addition, the model results demonstrated that for high deviation amplitudes, increasing stress in solid elements throughout the fractured area resulted in geometrical deformation in the concrete region, as illustrated in Fig. 14. However, the steel behavior has the greatest impact on the hysteretic loops at larger forced displacement. The acquired results might be used to construct several models for numerical modeling of the cyclic behavior of reinforced concrete members with fairly minimal computational effort.

Stress distribution and crack patterns of verified FE model
References
Işık, E.: A comparative study on the structural performance of an RC building based on updated seismic design codes: case of Turkey. Challenge 7, 123–134 (2021)
Anil, Ö.; Altin, S.: An experimental study on reinforced concrete partially infilled frames. Eng. Struct. 29(3), 449–460 (2007)
Asteris, P.G.; Kakaletsis, D.J.; Chrysostomou, C.: Failure modes of in-filled frames. Electron. J. Struct. Eng. (2011). https://doi.org/10.56748/ejse.11139
Kakaletsis, D.J.; Karayannis, C.G.: Experimental investigation of infilled reinforced concrete frames with openings. ACI Struct. J. 106(2), 132–141 (2009)
Bamdad, M.; Moghadam, A.S.; Mehrani, M.J.: Finite element analysis of load bearing capacity of a reinforced concrete frame subjected to cyclic loading. Civ. Eng. J. 2(5), 221–225 (2016)
Koutromanos, I.; Stavridis, A.; Shing, P.B.; Willam, K.: Numerical modeling of masonry-infilled RC frames subjected to seismic loads. Comput. Struct. 89(11–12), 1026–1037 (2011)
Stavridis, A.; Shing, P.B.: Finite-element modeling of nonlinear behavior of masonry-infilled RC frames. J. Struct. Eng. 136(3), 285–296 (2010)
Fiore, A.; Netti, A.; Monaco, P.: The influence of masonry infill on the seismic behaviour of RC frame buildings. Eng. Struct. 44, 133–145 (2012)
Chen, G.M.; Teng, J.G.; Chen, J.F.: Finite-element modeling of intermediate crack debonding in FRP-plated RC beams. J. Compos. Constr. 15(3), 339–353 (2011)
Grassl, P.; Johansson, M.; Leppänen, J.: On the numerical modelling of bond for the failure analysis of reinforced concrete. Eng. Fract. Mech. 189, 13–26 (2018)
Malm, R.; Holmgren, J.: Cracking in deep beams owing to shear loading. Part 2: non-linear analysis. Mag. Concr. Res. 60(5), 381–388 (2008)
Aktas, M.; Sumer, Y.: Nonlinear finite element analysis of damaged and strengthened reinforced concrete beams. J. Civ. Eng. Manag. 20(2), 201–210 (2014)
Mander, J.B.; Priestley, M.J.; Park, R.: Theoretical stress-strain model for confined concrete. J. Struct. Eng. 114(8), 1804–1826 (1988)
Sümer, Y.; Aktaş, M.: Defining parameters for concrete damage plasticity model. Chall. J. Struct. Mech. 1(3), 149–155 (2015)
Dolbow, J.; Moës, N.; Belytschko, T.: An extended finite element method for modeling crack growth with frictional contact. Comput. Methods Appl. Mech. Eng. 190(51–52), 6825–6846 (2001)
Giner, E.; Sukumar, N.; Tarancón, J.E.; Fuenmayor, F.J.: An Abaqus implementation of the extended finite element method. Eng. Fract. Mech. 76(3), 347–368 (2009)
Blasi, G.; De Luca, F.; Aiello, M.A.: Hybrid micro-modeling approach for the analysis of the cyclic behavior of RC frames. Front. Built Environ. 4, 75 (2018)
Cai, J.; Pan, J.; Xu, L.; Li, G.; Ma, T.: Mechanical behavior of RC and ECC/RC composite frames under reversed cyclic loading. J. Build. Eng. 35, 102036 (2021)
Lopez-Almansa, F.; Alfarah, B.; Oller, S.: Numerical simulation of RC frame testing with damaged plasticity model. Comparison with simplified models. In: Second European conference on earthquake engineering and seismology, Istanbul (pp. 1–12) (2014)
Folhento, P.L.P.; Braz-César, M.; Barros, R.: Cyclic response of a reinforced concrete frame: comparison of experimental results with different hysteretic models. AIMS Mater. Sci. 8(6), 917–931 (2021)
Raza, A.; Ahmad, A.: Numerical investigation of load-carrying capacity of GFRP-reinforced rectangular concrete members using CDP model in ABAQUS. Adv. Civ. Eng. (2019). https://doi.org/10.1155/2019/1745341
Arslan, M.E.; Durmuş, A.; Hüsem, M.: Cyclic behavior of GFRP strengthened infilled RC frames with low and normal strength concrete. Sci. Eng. Compos. Mater. 26(1), 30–42 (2019)
Kim, M.; Yu, E.: Experimental study on lateral-load-resisting capacity of masonry-infilled reinforced concrete frames. Appl. Sci. 11(21), 9950 (2021)
Kheyroddin, A.; Sepahrad, R.; Saljoughian, M.; Kafi, M.A.: Experimental evaluation of RC frames retrofitted by steel jacket, X-brace and X-brace having ductile ring as a structural fuse. J. Build. Pathol. Rehabilit. 4(1), 11 (2019)
Lim, J.C.; Ozbakkaloglu, T.; Gholampour, A.; Bennett, T.; Sadeghi, R.: Finite-element modeling of actively confined normal-strength and high-strength concrete under uniaxial, biaxial, and triaxial compression. J. Struct. Eng. 142(11), 04016113 (2016)
Carreira, D.J.; Chu, K.H.: Stress–strain relationship for plain concrete in compression. In: Journal proceedings (Vol. 82, No. 6, pp. 797-804) (1985)
Karsan, I.D.; Jirsa, J.O.: Behavior of concrete under compressive loadings. J. Struct. Div. 95(12), 2543–2564 (1969)
Yankelevsky, D.Z.; Reinhardt, H.W.: Uniaxial behavior of concrete in cyclic tension. J. Struct. Eng. 115(1), 166–182 (1989)
Bahn, B.Y.; Hsu, C.T.T.: Stress-strain behavior of concrete under cyclic loading. Mater. J. 95(2), 178–193 (1998)
CEB-FIB 2010, model code,The fib model code for concrete structures, cilt Case Postale 88, CH-1015 Lausanne, (2010)
H.K.B.S.E. Hibbitt: ABAQUS user’s manual. Providence, RI: Dassault Systèmes Simulia Corp., (2012)
Hordijk, D.A.: Local Approach to Fatigue of Concrete, (1991)
Li, X.X.L.; Wang, C.; Sato, J.: Framework for dynamic analysis of radioactive material transport packages under accident drop conditions. Nucl. Eng. Des. 360, 110480 (2020)
Duan, A.; Li, Z.Y.; Zhang, W.C.; **, W.L.: Flexural behaviour of reinforced concrete beams under freeze–thaw cycles and sustained load. Struct. Infrastruct. Eng. 13(10), 1350–1358 (2017)
Kupfer, H.B.; Gerstle, K.H.: Behavior of concrete under biaxial stresses. J .Eng. Mech. Div. 99(4), 853–866 (1973)
Genikomsou, A.S.; Polak, M.A.: Finite element analysis of punching shear of concrete slabs using damaged plasticity model in ABAQUS. Eng. Struct. 98, 38–48 (2015)
Mathern, A.; Yang, J.: A practical finite element modeling strategy to capture cracking and crushing behavior of reinforced concrete structures. Materials 14(3), 506 (2021)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shamsi, T., Sümer, Y. A Finite Element Modeling Approach for Analyzing the Cyclic Behavior of RC Frames. Arab J Sci Eng (2024). https://doi.org/10.1007/s13369-024-08788-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13369-024-08788-y