
Abstract
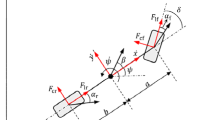
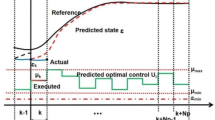
Efficient trajectory tracking approaches can enable autonomous vehicles not only to get a smooth trajectory but to achieve a lower energy dissipation. Since vehicle model plays an important role in trajectory tracking, this paper investigates and compares the performance of two classical vehicle models for trajectory tracking of autonomous vehicles using model predictive control (MPC). Firstly, a two-degree-of-freedom kinematic model and a three-degree-of-freedom yaw dynamic model are established for autonomous vehicles. Meanwhile, in order to carry out tracking control more effectively and smoothly, the tire slip angle has been taken into account by the dynamic model. Then, we design two MPC controllers for trajectory tracking, which are based on the kinematic model and the dynamic model, respectively. The performances of two MPC controllers are evaluated and compared on the Carsim/Matlab joint simulation platform. Experimental results demonstrated that, under low speed working conditions, both two MPC controllers can follow the reference trajectory with high accuracy and stability. However, under high speed working conditions, the tracking error of the kinematic model is too large to be used in the real trajectory tracking problem. On the contrary, the controller based on the dynamic model still performs a good tracking effect. In addition, this study offers a guidance on how to select a suitable vehicle model for autonomous vehicles under different speed working conditions.
Similar content being viewed by others

References
S. Victor, J. B. Receveur, P. Melchior, and P. Lanusse, “Optimal trajectory planning and robust tracking using vehicle model inversion,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 5, pp. 4556–4569, 2022.
J. Cao, C. Song, S. Peng, S. Song, and F. **ao, “Trajectory tracking control algorithm for autonomous vehicle considering cornering characteristics,” IEEE Access, vol. 8, no. 99, pp. 59470–59484, 2020.
J. Tan, C. Xu, L. Li, F. Wang, D. Cao, and L. Li, “Guidance control for parallel parking tasks,” IEEE/CAA Journal of Automatica Sinica, vol. 7, no. 1, pp. 301–306, 2020.
R. Wang, Y. Li, J. Fan, T. Wang, and X. Chen, “A novel pure pursuit algorithm for autonomous vehicles based on salp swarm algorithm and velocity controller,” IEEE Access, vol. 8, no. 3, pp. 166525–166540, 2020.
G. Huang and H. Uang, “Robust adaptive pid tracking control design for uncertain spacecraft systems: a fuzzy approach,” IEEE Transactions on Aerospace and Electronic Systems, vol. 42, no. 4, pp. 1506–1514, 2006.
J. Meng and S. Song, “Parking path tracking method based on kalman filter and fuzzy control,” International Core Journal of Engineering, vol. 6, no. 1, pp. 77–85, 2020.
B. Ye, W. Wu, K. Ruan, L. Li, T. Chen, H. Gao, and Y. Chen, “A survey of model predictive control methods for traffic signal control,” IEEE/CAA Journal of Automatica Sinica, vol. 6, no. 3, pp. 623–640, 2019.
B. Gutjahr, L. Grll, and M. Werling, “Lateral vehicle trajectory optimization using constrained linear time-varying mpc,” IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 6, pp. 1586–1595, 2017.
Y. Xu, J. Zhou, H. Rao, R. Lu, and L. **e, “Reset moving horizon estimation for quantized discrete time systems,” IEEE Transactions on Automatic Control, vol. 66, no. 9, pp. 4199–4205, 2020.
A. Ferramosca, D. Limon, I. Alvarado, T. Alamo and E. F. Camacho, “MPC for tracking with optimal closed-loop performance,” Proc. of 47th IEEE Conference on Decision and Control, pp. 4055–4060, 2008.
A. Ferramosca, D. Limon, I. Alvarado, F. Alamo, T. Castao, and E. F. Camacho, “Optimal mpc for tracking of constrained linear systems,” International Journal of Systems Science, vol. 42, no. 8, pp. 1265–1276, 2011.
Z. Li, P. Wang, H. Liu, Y. Hu, and H. Chen, “Coordinated longitudinal and lateral vehicle stability control based on the combined-slip tire model in the MPC framework,” Mechanical Systems and Signal Processing, vol. 161, pp. 103–105, 2021.
L. Tang, F. Yan, B. Zou, K. Wang, and C. Lv, “An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles,” IEEE Access, vol. 8, no. 99, pp. 51400–51413, 2020.
H. Wang, B. Liu, X. **, and Q. An, “Path tracking control for autonomous vehicles based on an improved MPC,” IEEE Access, vol. 7, no. 7, pp. 161064–161073, 2019.
Y. Cao, D. Stuart, W. Ren, and Z. Meng, “Distributed containment control for multiple autonomous vehicles with double-integrator dynamics: Algorithms and experiments,” IEEE Transactions on Control Systems Technology, vol. 19, no. 4, pp. 929–938, 2011.
Y. Xu, Z. Yao, R. Lu, and B. Ghosh, “A novel fixed-time protocol for first-order consensus tracking with disturbance rejection,” IEEE Transactions on Automatic Control, vol. 67, no. 11, pp. 6180–6186, 2021.
Y. Xu, W. Lv, W. Lin, R. Lu, and D. E. Quevedo, “On extended state estimation for nonlinear uncertain systems with round-robin protocol,” Automatica, vol. 138, pp. 110154, 2022.
M. Abdelaal, M. Frnzle, and A. Hahn, “NMPC-based trajectory tracking and collison avoidance of underactuated vessels with elliptical ship domain,” IFAC-PapersOnLine, vol. 49, no. 23, pp. 22–27, 2016.
A. Alessandretti, A. P. Aguiar, and C. N. Jones, “An input-to-state stability approach to economic optimization in model predictive control,” IEEE Transactions on Automatic Control, vol. 62, no. 12, pp. 6081–6093, 2017.
J. Kohler, M. A. Muller, and F. Allgower, “Nonlinear reference tracking: An economic model predictive control perspective,” IEEE Transactions on Automatic Control, vol. 64, no. 99, pp. 254–269, 2019.
C. Rao and J. Rawlings, “Linear programming and model predictive control,” Journal of Process Control, vol. 10, no. 2, pp. 283–289, 2015.
S. Frendi, R. Mellah, L. Seddiki, and H. Akdag, “Tracking controller design of a sideslip angle and yaw rate for electrical vehicle bicycle model,” IFAC-PapersOnLine, vol. 49, no. 5, pp. 169–174, 2016.
J. Guo, Y. Luo, K. Li, and Y. Dai, “Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation,” Mechanical Systems and Signal Processing, vol. 105, no. 3, pp. 183–199, 2018.
R. S. Mulliken, “Magic formula, structure of bond energies and isovalent hybridization,” Journal of Physical Chemistry, vol. 56, no. 3, pp. 295–311, 1952.
B. Ye, W. Wu, and W. Mao, “Distributed model predictive control method for optimal coordination of signal splits in urban traffic networks,” Asian Journal of Control, vol. 17, no. 3, pp. 775–790, 2015.
B. Ye, W. Wu, L. Li, and W. Mao, “A hierarchical model predictive control approach for signal splits optimization in large-scale urban road networks,” IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 8, pp. 2182–2192, 2016.
D. Shen, Y. Chen, and L. Li, “State-feedback switching linear parameter varying control for vehicle path following under uncertainty and external disturbances,” Proc. of the IEEE 25th International Conference on Intelligent Transportation Systems, pp. 3125–3132, 2022.
J. Yin, D. Shen, X. Du, and L. Li, “Distributed stochastic model predictive control with Taguchi’s robustness for vehicle platooning,” IEEE Transactions on Intelligent Transportation Systems, vol.23, no.9, pp. 15967–15979, 2022.
D. **sheng, Z. Tianneng, and Z. Chiwei, “Structural finite element model modification based on second-order taylor series expansion and wind-driven optimization algorithm,” Journal of Building Structures, vol. 40, no. 2, pp. 210–218, 2019.
H. Li and Y. Luo, “Integrated coordination control for distributed drive electric vehicle trajectory tracking,” International Journal of Automotive Technology, vol. 21, no. 4, pp. 1047–1060, 2020.
L. Li, X. Peng, F. Wang, D. Cao, and L. Li, “A situation-aware collision avoidance strategy for car-following,” IEEE/CAA Journal of Automatica Sinica, vol. 5, no. 5, pp. 1012–1016, 2018.
Z. Tingfang, Z. Chaomin, L. Mingchun, H. **nyi, and Q. Zhilin, “Control strategy study on four-wheel steering vehicle based on improved sliding model control,” Journal of Bei**g Institute of Technology, vol. 37, no. 11, pp. 1129–1136, 2017.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors declare that there is no competing financial interest or personal relationship that could have appeared to influence the work reported in this paper. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported in part by Zhejiang Provincial Natural Science Foundation of China under Grant No.LTGS23F030002; and by the Science and Technology Program of Zhejiang Province of China under Grant No.2023C01174; and by the Jiaxing Public Welfare Research Program No.2023AY11034; and by the Open Research Projectof the State Key Laboratory of Industrial Control Technology, Zhejiang University, China No.ICT2022B52; and by the National Natural Science Foundation of China under Grant No.61603154.
Bao-Lin Ye is currently an associate professor in the Department of Electronic and Information Engineering at the School of Information Science and Engineering, Jiaxing University, Jiaxing, Zhejiang, China. He received his Ph.D. degree from Zhejiang University, Hangzhou, China, in June 2015. He was a Visiting Scholar at Indiana University-Purdue University Indianapolis, Indianapolis, IN, USA, from 2018 to 2019. His research interests include deep learning, reinforcement learning, intelligent control theory, and autonomous vehicle control.
Shaofeng Niu is pursuing an M.S. degree in computer technology at Zhejiang Sci-tech University, **asha Campus, Hangzhou, Zhejiang, China. He received his B.E. degree from Ningbo University of Technology, Ningbo, Zhejiang, China in 2020. His research interests include model predictive control, autonomous vehicles, and artificial intelligence.
Lingxi Li is currently a professor in the Department of Electrical and Computer Engineering at Purdue School of Engineering and Technology, Indiana University-Purdue University Indianapolis, USA. He received his Ph.D. degree in electrical and computer engineering from the University of Illinois at Urbana-Champaign in 2008. He has authored/co-authored one book and over 130 research articles in refereed journals and conferences. He is currently serving as an associate editor for five international journals and has served as general chair, program chair, program co-chair, publication chair, etc., for more than 30 international conferences. His current research focuses on modeling, analysis, control, and optimization of complex systems, connected and automated vehicles, intelligent transportation systems, intelligent vehicles, discrete event dynamic systems, and human machine interactions.
Weimin Wu received his B.S. degree in electrical engineering, an M.S. degree in computer engineering from the Taiyuan University of Science and Technology, Taiyuan, China, and a Ph.D. degree in control science and engineering from Zhejiang University, Hangzhou, China, in 1996, 1999, and 2002, respectively. In 2003, he joined Zhejiang University, where he is currently a Professor with the College of Control Science and Engineering. He was a Visiting Scholar with the Georgia Institute of Technology, Atlanta, GA, USA, from 2007 to 2008, and with the New Jersey Institute of Technology, Newark, NJ, USA, from 2008 to 2009. His research interests include discrete event systems and its applications in manufacturing, transportation, self-driving, and logistics automation systems. He served as an Associate Editor for the IEEE Transactions on Automation Science and Engineering and Asian Journal of Control.
Rights and permissions
About this article

Cite this article
Ye, BL., Niu, S., Li, L. et al. A Comparison Study of Kinematic and Dynamic Models for Trajectory Tracking of Autonomous Vehicles Using Model Predictive Control. Int. J. Control Autom. Syst. 21, 3006–3021 (2023). https://doi.org/10.1007/s12555-022-0337-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-022-0337-8