
Abstract
Lagrange’s equations represent the common approach in finite element analysis of an elastic multibody system. The most important step in this case is to write the governing equations. The work develops an alternative method to obtain these equations, using so-called Gibbs–Appell formalism. The advantage of this method is the decrease in the number of calculations to be made. The acceleration energy will be calculated first for a one-dimensional finite element, and then Gibbs–Appell equations are applied in the classical form. The number of differentiations required, compared to the method of Lagrange’s equations, decreases significantly, with effects on the computational time required to solve such a problem. We can assume that, due to its simplicity, this method will determine the interest of researchers in the case of large industrial applications.
Similar content being viewed by others

References
Wasfy, T.M., Noor, A.K.: Computational strategies for flexible multibody systems. Appl. Mech. Rev. 56(6), 553–613 (2003)
Erdman, A.G., Sandor, G.N., Oakberg, A.: A general method for kineto-elastodynamic analysis and synthesis of mechanisms. J. Manuf. Sci. Eng. Trans. ASME 94(4), 1193–1205 (1972)
Sung, C.K.: An experimental study on the nonlinear elastic dynamic response of linkage mechanism. Mech. Mach. Theory 21, 121–133 (1986)
Deü, J.-F., Galucio, A.C., Ohayon, R.: Dynamic responses of flexible-link mechanisms with passive/active dam** treatment. Comput. Struct. 86(3–5), 258–265 (2008)
Fanghella, P., Galletti, C., Torre, G.: An explicit independent-coordinate formulation for the equations of motion of flexible multibody systems. Mech. Mach. Theory 38, 417–437 (2003)
Gerstmayr, J., Schöberl, J.: A 3d finite element method for flexible multibody systems. Multibody Syst. Dyn. 15(4), 305–320 (2006)
Hou, W., Zhang, X.: Dynamic analysis of flexible linkage mechanisms under uniform temperature change. J. Sound Vib. 319(1–2), 570–592 (2009)
Ibrahimbegović, A., Mamouri, S., Taylor, R.L., Chen, A.J.: Finite element method in dynamics of flexible multibody systems: modeling of holonomic constraints and energy conserving integration schemes. Multibody Syst. Dyn. 4(2–3), 195–223 (2000)
Khang, N.V.: Kronecker product and a new matrix form of Lagrangian equations with multipliers for constrained multibody systems. Mech. Res. Commun. 38(4), 294–299 (2011)
Khulief, Y.A.: On the finite element dynamic analysis of flexible mechanisms. Comput. Method Appl. Mech. Eng. 97(1), 23–32 (1992)
Itu, C., Oechsner, A., Vlase, S., Marin, M.: Improved rigidity of composite circular plates through radial ribs. Proc. Inst. Mech. Eng. L J. Mater. Des. Appl. 233(8), 1585–1593 (2019)
Scutaru, M.L., et al.: New analytical method based on dynamic response of planar mechanical elastic systems. Bound. Value Probl. 2020(1), 1–14 (2020)
Appell, P.: Traité de Mécanique Rationnelle: Dynamique Des Systèmes. Wentworth Press, Sydney (2018)
Emam, S.A.: Generalized Lagrange’s equations for systems with general constraints and distributed parameters. Multibody Syst. Dyn. 49(1), 95–117 (2020)
Pennestri’, E., de Falco, D., Vita, L.: An investigation of the inuence of pseudoinverse matrix calculations on multibody dynamics by means of the Udwadia-Kalaba formulation. J. Aerosp. Eng. 22(4), 365–372 (2009)
Piras, G., Cleghorn, W.L., Mills, J.K.: Dynamic finite-element analysis of a planar high speed, high-precision parallel manipulator with flexible links. Mech. Mach. Theory 40(7), 849–862 (2005)
Shi, Y.M., Li, Z.F., Hua, H.X., Fu, Z.F., Liu, T.X.: The modelling and vibration control of beams with active constrained layer dam**. J. Sound Vib. 245(5), 785–800 (2001)
Simeon, B.: On Lagrange multipliers in flexible multibody dynamic. Comput. Method Appl. Mech. Eng. 195(50–51), 6993–7005 (2006)
Vlase, S.: Dynamical response of a multibody system with flexible elements with a general three dimensional motion. Rom. J. Phys. 57(3–4), 676–693 (2012)
Negrean, I., Crisan, A.V., Vlase, S.: A new approach in analytical dynamics of mechanical systems. Symmetry 2020(12), 1–24 (2020)
Negrean, I.: Advanced notions in analytical dynamics of systems. Acta Tech. Napoc. Appl. Math. Mech. Eng. 60(4), 491–502 (2017)
Vlase, S., Negrean, I., Marin, M., Nastac, S.: Kane’s method-based simulation and modeling robots with elastic elements, using finite element method. Mathematics 2020(8), 1–23 (2020)
Dowell, E.: Hamilton’s principle and Hamilton’s equations with holonomic and non-holonomic constraints. Nonlinear Dyn. 88(2), 1093–1097 (2017)
Sklar, L.: Hamilton’s Equations. Philosophy and the Foundations of Dynamics. Cambridge University Press, Cambridge (2013)
Tong, M.M.: Flexible multibody dynamics formulation by Hamilton’s equations. Int. Mech. Eng. Congr. Expo. 2010(8), 725–734 (2012)
Negrean, I., Crisan, A.-V.: Synthesis on the acceleration energies in the advanced mechanics of the multibody systems. Symmetry 2019(11), 1–20 (2019)
Vlase, S., Negrean, I., Marin, M., Scutaru, M.L.: Energy of accelerations used to obtain the motion equations of a three- dimensional finite element. Symmetry-Basel 2020(12), 1–13 (2020)
Öchsner, A.: Computational Statics and Dynamics: An Introduction Based on the Finite Element Method, 2nd edn. Springer, Singapore (2020)
Vlase, S., Marin, M., Öchsner, A., Scutaru, M.L.: Motion equation for a flexible one-dimensional element used in the dynamical analysis of a multibody system. Contin. Mech. Therm. 31(3), 715–724 (2019)
Riaz, A., Ellahi, R., Bhatti, M.M., Marin, M.: Study of heat and mass transfer in the Eyring-Powell model of fluid propagating peristaltically through a rectangular compliant channel. Heat Transf. Res. 50(16), 1539–1560 (2019)
Bhatti, M.M., Ellahi, R., Zeeshan, A., et al.: Numerical study of heat transfer and Hall current impact on peristaltic propulsion of particle-fluid suspension with compliant wall properties. Mod. Phys. Lett. B 33(35), 1–16 (2019). Art. No. 1950439
Zhang, L., Arain, M.B., Bhatti, M.M., Zeeshan, A., Hal-Sulami, H.: Effects of magnetic Reynolds number on swimming of gyrotactic microorganisms between rotating circular plates filled with nanofluids. Appl. Math. Mech. 41(4), 637–54 (2020)
Abbas, I., Marin, M.: Analytical solution of thermoelastic interaction in a half-space by pulsed laser heating. Phys. E Low Dimens. Syst. Nanostruct. 87, 254–260 (2017)
Abd-Elaziz, E.M., Marin, M., Othman, M.I.A.: On the effect of Thomson and initial stress in a thermo-porous elastic solid under GN electromagnetic theory. Symmetry 11(3), 413 (2019)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Andreas Öchsner.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
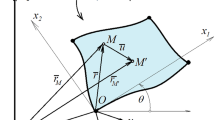
The coefficients \(r_{ij}\) define the position of the unit vector of the local coordinate system Oxyz. The orthogonality condition leads to:
where \(\bar{{\delta }}_{ij} \) is the Kronecker delta. If we differentiate this equation, it will result:
Denote:
The relation (20) becomes:
The skew-symmetric tensor \(\omega _{ik} \) is the operator angular velocity (with its components express in the global reference system). To this corresponds the angular velocity vector defined by:
The angular acceleration skew symmetric operator is:
The angular acceleration vector defined by:
We shall have:
from where:
result used in the following calculus.
Rights and permissions
About this article

Cite this article
Vlase, S., Marin, M. & Öchsner, A. Gibbs–Appell method-based governing equations for one-dimensional finite elements used in flexible multibody systems. Continuum Mech. Thermodyn. 33, 357–368 (2021). https://doi.org/10.1007/s00161-020-00907-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00161-020-00907-y