
Abstract
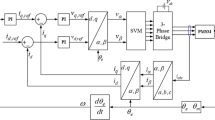
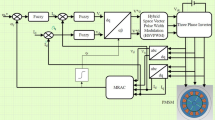
This paper proposes a robust H∞ fuzzy control of electric vehicle based on Permanent Magnet Synchronous Motor (PMSM) in order to guarantee speed reference tracking performance and deal with large load torque variation. First, a model is elaborated based on vehicle dynamics. Then, a Takagi-Sugeno fuzzy approach is employed to deal with the nonlinearities of the model of PMSG in the synchronous d-q frame. Second, in order to deal with large load torque variation, considered as disturbance, and to track the reference speed, proportional integral (PI) Fuzzy controller is designed. Lyapunov function, H∞ approach and Linear Matrix Inequality (LMI) tool are used to calculate the gains of the developed controller. Finally, simulations are proposed to validate the effectiveness of the suggested control strategy.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others
References
Hossain, M., Kumar, L., El Haj Assad, M., Alayi, R.: Advancements and future prospects of electric vehicle technologies: a comprehensive review. Complexity 2022, 1–21 (2022)
Abo-Khalil, A.G., et al.: Electric vehicle impact on energy industry, policy, technical barriers, and power systems. Int. J. Thermofluids 13, 100134 (2022)
Jalali, M., Khajepour, A., Chen, S.-K., Litkouhi, B.: Integrated stability and traction control for electric vehicles using model predictive control. Control. Eng. Pract. 54, 256–266 (2016)
Han, Z., Xu, N., Chen, H., Huang, Y., Zhao, B.: Energy-efficient control of electric vehicles based on linear quadratic regulator and phase plane analysis. Appl. Energy 213, 639–657 (2018)
Xu, X., Liang, Y., Jordan, M., Tenberge, P., Dong, P.: Optimized control of engine start assisted by the disconnect clutch in a P2 hybrid automatic transmission. Mech. Syst. Signal Process. 124, 313–329 (2019)
Zhang, D., Liu, G., Zhou, H., Zhao, W.: Adaptive sliding mode fault-tolerant coordination control for four-wheel independently driven electric vehicles. IEEE Trans. Industr. Electron. 65(11), 9090–9100 (2018)
Peng, H., Wang, W., An, Q., **ang, C., Li, L.: Path tracking and direct yaw moment coordi- nated control based on robust MPC with the finite time horizon for autonomous independent- drive vehicles. IEEE Trans. Veh. Technol. 69(6), 6053–6066 (2020)
Yang, Y., He, Q., Fu, C., Liao, S., Tan, P.: Efficiency improvement of permanent magnet synchronous motor for electric vehicles. Energy 213, 118859 (2020)
Inoue, Y., Morimoto, S., Sanada, M.: Control method suitable for direct-torque-control- based motor drive system satisfying voltage and current limitations. IEEE Trans. Ind. Appl. 48(3), 970–976 (2012)
Li, S., Liu, Z.: Adaptive speed control for permanent-magnet synchronous motor system with variations of load inertia. IEEE Trans. Industr. Electron. 56(8), 3050–3059 (2009)
Corradini, M.L., Ippoliti, G., Longhi, S., Orlando, G.: A quasi-sliding mode approach for robust control and speed estimation of PM synchronous motors. IEEE Trans. Industr. Electron. 59(2), 1096–1104 (2011)
Takagi, T., Sugeno, M.: Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1, 116–132 (1985)
Ounnas, D., Chenikher, S., Bouktir, T.: Tracking control for permanent magnet synchronous machine based on Takagi-Sugeno fuzzy models. In: 2013 Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), pp. 1–5. IEEE (2013)
Tseng, C.-S., Chen, B.-S., Uang, H.-J.: Fuzzy tracking control design for nonlinear dynamic systems via TS fuzzy model. IEEE Trans. Fuzzy Syst. 9(3), 381–392 (2001)
Dahmani, H., Pagès, O., El Hajjaji, A., Daraoui, N.: Observer-based tracking control of the vehicle lateral dynamics using four-wheel active steering. In: 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), pp. 360–365. IEEE (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Elouardi, E., Mouhib, O., Bentaleb, A., Ouardi, B.E., Lassioui, A., Fadil, H.E. (2024). Cruise Control System of Electric Vehicle Powered by PMSM Motor Using T-S Fuzzy Approach. In: El Fadil, H., Zhang, W. (eds) Automatic Control and Emerging Technologies. ACET 2023. Lecture Notes in Electrical Engineering, vol 1141. Springer, Singapore. https://doi.org/10.1007/978-981-97-0126-1_64
Download citation
DOI: https://doi.org/10.1007/978-981-97-0126-1_64
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-97-0125-4
Online ISBN: 978-981-97-0126-1
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)