
Abstract
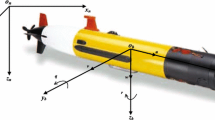
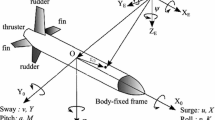
Disturbance rejection control of underwater UAV is a key technology. First of all, In this paper, the model of underwater UAV will be established, and the closed-loop control system will be constructed according to the virtual control quantity. Then, sliding mode controllers and extended state observer are designed to realize the attitude and position control. Finally, the simulation is performed to show the robustness of UAV. It can be proved that under the influence of inhomogeneous media, UAV can still have good robustness and compensate for interference.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Bouabdallah, S., Siegwart, R.: Backstep** and sliding-mode techniques applied to an indoor micro quadrotor. In: Proceedings of the 2005 IEEE International Conference on Robotics and Automation, ICRA 2005, pp. 2247–2252. IEEE (2005)
Suresh, K.K., Kahn, A.D., Yavrucuk, I.: GTMARS - flight controls and computer architecture. Georgia Institute of Technology, Atlanta (2000)
Amin, R., Li, A.: A review of quadrotor UAV: control methodologies and performance evaluation. Int. J. Autom. Control 10(2), 87–103 (2016)
Rosales, C., Soria, C., Carelli, R., et al.: Adaptive dynamic control of a quadrotor for trajectory tracking. In: International Conference on Unmanned Aircraft Systems (ICUAS), Miami, pp. 143–149 (2017)
De Crousaz, C., Farshidian, F., Neunert, M., et al.: Unified motion control for dynamic quadrotor maneuvers demonstrated on slung load and rotor failure tasks. In: IEEE International Conference on Robotics and Automation ( ICRA), Seattle, pp. 2223–2229 (2015)
Yang, H., Lee, Y., Jeon, S., et al.: Multi-rotor drone tutorial: systems, mechanics, control and state estimation. Intell. Serv. Robot. 10(2), 79–93 (2017)
Ali, N., Tawiah, I., Zhang, W.: Finite-time extended state observer based nonsingular fast terminal sliding mode control of autonomous underwater vehicles. Ocean Eng. 218, 108179 (2020)
Nie, B.: Study on the modeling and control of a micro quadrotor. National University of Defense Technology (2006)
Ling, J.: Study of flight control algorithm for quad-rotor aircraft. Nanchang University (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Tao, C., Song, Z., Wang, B. (2022). Flight Control of Underwater UAV Based on Extended State Observer and Sliding Mode Method. In: Fan, W., Zhang, L., Li, N., Song, X. (eds) Methods and Applications for Modeling and Simulation of Complex Systems. AsiaSim 2022. Communications in Computer and Information Science, vol 1712. Springer, Singapore. https://doi.org/10.1007/978-981-19-9198-1_22
Download citation
DOI: https://doi.org/10.1007/978-981-19-9198-1_22
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-9197-4
Online ISBN: 978-981-19-9198-1
eBook Packages: Computer ScienceComputer Science (R0)