
Abstract
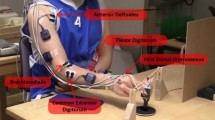
Robotic exoskeleton with surface electromyogram (sEMG)-based control or feedback has emerged recently as a very effective option for post-stroke rehabilitation. However, these systems are still very costly and too complex to use as an at-home rehabilitation setup. A cost-effective and easy-to-use exoskeleton system for upper limb rehabilitation is being developed. As part of the study, here, sEMG-based exoskeleton control architecture was evaluated for its performance and real-time implementation feasibility. The prediction algorithm needs to detect the subject's hand movements (extension, flexion, and mass grasp) using sEMG from the forearm and generates corresponding controls for the exoskeleton in real time. To design this, time-domain features with low complexity were extracted and fed to the prediction algorithm. Support vector machine (SVM) and random forest (RF) algorithms were employed as the classifier and evaluated based on the classification accuracy (CA), training time (TT), model prediction time (PT), and cross-validation accuracy (CVA). The influence of the sequential feature selection (SFS) algorithm on both the predictive models was examined. The study showed that the SVM in combination with SFS performed optimally considering parameters like accuracy, real-time applicability (TT and PT), etc.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Cramer SC, Wolf SL, Adams HP, Chen D, Dromerick AW, Dunning K, Ellerbe C, Grande A, Janis S, Lansberg MG, Lazar RM, Palesch YY, Richards L, Roth E, Savitz SI, Wechsler LR, Wintermark M, Broderick JP (2017) Stroke recovery and rehabilitation research: issues, opportunities, and the national institutes of health stroke net. Stroke 48:813–819. https://doi.org/10.1161/STROKEAHA.116.015501
Lyu M, Chen WH, Ding X, Wang J, Pei Z, Zhang B (2019) Development of an EMG-controlled knee exoskeleton to assist home rehabilitation in a game context. Front Neurorobot 13:1–15. https://doi.org/10.3389/fnbot.2019.00067
Lambelet C, Lyu M, Woolley D, Gassert R, Wenderoth N (2017) The eWrist—a wearable wrist exoskeleton with sEMG-based force control for stroke rehabilitation. IEEE Int Conf Rehabil Robot 726–733. https://doi.org/10.1109/ICORR.2017.8009334
Song R, Tong KY (2005) Using recurrent artificial neural network model to estimate voluntary elbow torque in dynamic situations. Med Biol Eng Comput 43:473–480. https://doi.org/10.1007/BF02344728
Beyaert C, Vasa R, Frykberg GE (2015) Gait post-stroke: pathophysiology and rehabilitation strategies. Neurophysiol Clin 45:335–355. https://doi.org/10.1016/j.neucli.2015.09.005
Irastorza-Landa N, Sarasola-Sanz A, López-Larraz E, Bibián C, Shiman P, Birbaumer N, Ramos-Murguialday A (2017) Design of continuous EMG classification approaches towards the control of a robotic exoskeleton in reaching movements. IEEE Int Conf Rehabil Robot 128–133. https://doi.org/10.1109/ICORR.2017.8009234
Hakonen M, Piitulainen H, Visala A (2015) Current state of digital signal processing in myoelectric interfaces and related applications. Biomed Signal Process Control 18:334–359. https://doi.org/10.1016/j.bspc.2015.02.009
Marquez DC, von Tscharner V, Murari K, Nigg BM (2018) Development of a multichannel current-EMG system for coherence modulation with visual biofeedback. PLoS ONE 13:1–18. https://doi.org/10.1371/journal.pone.0206871
Lenzi T, De Rossi SMM, Vitiello N, Carrozza MCC (2012) Intention-based EMG control for powered exoskeletons. Trans Biomed Eng 59:2180–2190.
Vapnik V (2013) The nature of statistical learning theory. Springer Science & Business Media.
He X, Chaney NW, Schleiss M, Sheffield J (2016) Spatial downscaling of precipitation using adaptable random forests. Water Resour Res 52:8217–8237. https://doi.org/10.1002/2016WR019034
Wege A, Zimmermann A (2007) Electromyography sensor based control for a hand exoskeleton. In: 2007 IEEE International conference robotics and biomimetics, ROBIO, pp 1470–1475. https://doi.org/10.1109/ROBIO.2007.4522381
Chowdhury RH, Reaz MBI, Bin Mohd Ali MA, Bakar AAA, Chellappan K, Chang TG (2013) Surface electromyography signal processing and classification techniques. Sensors (Switzerland) 13:12431–12466. https://doi.org/10.3390/s130912431
Bakshi K, Pramanik R, Manjunatha M, Kumar CS (2018) Upper limb prosthesis control: a hybrid EEG-EMG scheme for motion estimation in transhumeral subjects. In: Proceedings of Annual International Conference, IEEE Engineering in Medicine and Biology Societ, EMBS 2018, July 2024–2027. https://doi.org/10.1109/EMBC.2018.8512678
Diez P (Ed.) (2018) Smart Wheelchairs and Brain-computer Interfaces: Mobile Assistive Technologies. Academic Press.
Acknowledgements
This ongoing research is part of an IMPRINT project supported by Ministry of Human Resources Development and Indian Council of Medical Research at the Indian Institute of Technology, Kharagpur.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Appendix
Appendix
Ethical Clearance: Institutional ethical clearance reference: IIT/SRIC/SAO/2016 dated December 14, 2016.
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ranjan, S., Bakshi, K., Gaur, A., Manjunatha, M., Kumar, C.S. (2021). Case Study of Develo** an Electromyogram-Based Exoskeleton Control for Upper Limb Rehabilitation. In: Tiwari, A., Ahuja, K., Yadav, A., Bansal, J.C., Deep, K., Nagar, A.K. (eds) Soft Computing for Problem Solving. Advances in Intelligent Systems and Computing, vol 1392 . Springer, Singapore. https://doi.org/10.1007/978-981-16-2709-5_14
Download citation
DOI: https://doi.org/10.1007/978-981-16-2709-5_14
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-2708-8
Online ISBN: 978-981-16-2709-5
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)