
Abstract
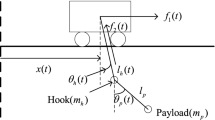
In practical applications, tower crane systems always exhibit double-pendulum effects, because of non-ignorable hook mass and large payload scale, which makes the model more complicated and most existing control methods inapplicable. Additionally, most available control methods for tower cranes need to linearize the original dynamics and require exact knowledge of system parameters, which may degrade the control performance significantly and make them sensitive to parametric uncertainties. To tackle these problems, a novel adaptive neural network controller is designed based on the original dynamics of double-pendulum tower crane systems without any linear processing. For this reason, the neural network structures are utilized to estimate the parametric uncertainties and external disturbances. Based on the estimated information, and adaptive controller is then designed. The stability of the overall closed-loop system is proved by Lyapunov techniques. Simulation results are illustrated to verify the superiority and effectiveness of the proposed control law.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Chen, H., Sun, N.: Nonlinear control of underactuated systems subject to both actuated and unactuated state constraints with experimental verification. In: IEEE Transactions on Industrial Electronics, In Press. https://doi.org/10.1109/tie.2019.2946541
Sun, N., Liang, D., Wu, Y., Chen, Y., Qin, Y., Fang, Y.: Adaptive control for pneumatic artificial muscle systems with parametric uncertainties and unidirectional input constraints. IEEE Trans. Ind. Inf. 16(2), 969–979 (2020)
Pan, H., **g, X., Sun, W., Gao, H.: A bio-inspired dynamics-based adaptive tracking control for nonlinear suspension systems. IEEE Trans. Control Syst. Technol. 26(3), 903–914 (2018)
Qian, D., Ding, H., Lee, S.G., Bae, H.: Suppression of chaotic behaviors in a complex biological system by disturbance observer-based derivative integral terminal sliding mode. IEEE/CAS J. Automatica Sinica 7(1), 126–135 (2020)
Kim, G.H., Hong, K.S.: Adaptive sliding-mode control of an offshore container crane with unknown disturbances. IEEE/ASME Trans. Mechatron. 24(6), 2850–2861 (2019)
Cahyono, R.T., Flonk, E.J., Jayawardhana, B.: Discrete-event systems modeling and the model predictive allocation algorithm for integrated berth and quay crane allocation. In: IEEE Transactions on Intelligent Transportation Systems, In Press. https://doi.org/10.1109/tits.2019.- 2910283
Zhang, M., **g, X.: A bioinspired dynamics-based adaptive fuzzy SMC method for half-car active suspension systems with input dead zones and saturations. In: IEEE Transactions on Cybernetics, In Press. https://doi.org/10.1109/tcyb.2020.2972322
Zhang, Z., Li, L., Wu, Y.: Disturbance-observer-based antiswing control of underactuated crane systems via terminal sliding mode. IET Control Theor. Appl. 12(18), 2588–2594 (2018)
Le, A.T.: Neural observer and adaptive fractional-order back step** fast terminal sliding mode control of RTG cranes. In: IEEE Transactions on Industrial Electronics, In Press. https://doi.org/10.1109/tie.2019.2962450
Chen, H., Fang, Y., Sun, N.: A swing constraint guaranteed MPC algorithm for underactuated overhead cranes. IEEE/ASME Trans. Mechatron. 21(5), 2543–2555 (2016)
Kolar, B., Rarms, H., Schlacher, K.: Time-optimal flatness based control of a gantry crane. Control Eng. Practice 60, 18–27 (2017)
Sun, N., Wu, Y., Liang, X., Fang, Y.: Nonlinear stable transportation control for double-pen dulum shipboard cranes with ship-motion-induced disturbances. IEEE Trans. Ind. Electron. 66(12), 9467–9479 (2019)
Ouyang, H., Wu, X., Zhang, G.: Tracking and load sway reduction for double-pendulum rotary cranes using adaptive nonlinear control approach. International Journal of Robust and Nonlinear Control, In Press. https://doi.org/10.1002/rnc.4854
Ngo, Q.H., Nguyen, N.P., Nguyen, C.N., Tran, T.H., Ha, Q.P.: Fuzzy sliding mode control of an offshore container crane. Ocean Eng. 140, 125–134 (2017)
Le, A.T., Lee, S.G.: 3D cooperative control of tower cranes using robust adaptive techniques. J. Franklin Institute 354(18), 8333–8357 (2017)
Omar, H.M., Nayfeh, A.H.: Gain scheduling feedback control of tower cranes with friction compensation. J. Vibrat. Control 10(2), 269–289 (2004)
Böck, M., Kugi, A.: Real-time nonlinear model predictive path-following control of a laboratory tower crane. IEEE Trans. Control Syst. Technol. 22(4), 1461–1473 (2014)
Wu, T.S., Karkoub, M., Yu, W.S., Chen, C.T., Her, M.G., Wu, K.W.: Anti-sway tracking control of tower cranes with delayed uncertainty using a robust adaptive fuzzy control. Fuzzy Sets Syst. 290, 118–137 (2016)
Duong, S.C., Uezato, E., Kinjo, H., Yamamoto, T.: A hybrid evolutionary algorithm for recurrent neural network control of a three-dimensional tower crane. Autom. Construct. 23, 55–63 (2012)
Zhang, M., Zhang, Y., Ji, B., Ma, C., Cheng, X.: Modeling and energy-based sway reduction control for tower crane systems with double-pendulum and spherical-pendulum effects. Measure. Control 53(1–2), 141–150 (2020)
Khalil, H.K.: Nonlinear Systems. 3rd edn. Prentice-Hall, New Jersey (2002)
Acknowledgements
This work is partially supported by the Innovation and Technology Fund (ITF) Project of HK ITC (Ref. ITP/020/19AP), the Strategic Research Fund of the Research Institute of Urban Sustainable Development, HK Polytechnic University (PolyU), and the Project of Strategic Importance of HK PolyU, the General Research Fund of HK RGC under Grant No. 15206717, the Key Research and Development (Special Public-Funded Projects) of Shandong Province under Grant No. 2019GGX104058, the National Natural Science Foundation for Young Scientists of China under Grant No. 61903155.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Zhang, M., **g, X. (2020). Adaptive Neural Network Control for Double-Pendulum Tower Crane Systems. In: Zhang, H., Zhang, Z., Wu, Z., Hao, T. (eds) Neural Computing for Advanced Applications. NCAA 2020. Communications in Computer and Information Science, vol 1265. Springer, Singapore. https://doi.org/10.1007/978-981-15-7670-6_8
Download citation
DOI: https://doi.org/10.1007/978-981-15-7670-6_8
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-7669-0
Online ISBN: 978-981-15-7670-6
eBook Packages: Computer ScienceComputer Science (R0)