
Abstract
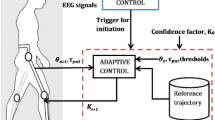
A user intention based rehabilitation strategy for a lower-limb wearable robot is proposed and evaluated. The control strategy, which involves monitoring the human-orthosis interaction torques, determines the gait initiation instant and modifies orthosis operation for gait assistance, when needed. Orthosis operation is classified as assistive or resistive in function of its evolution with respect to a normal gait pattern. The control algorithm relies on the adaptation of the joints’ stiffness in function of their interaction torques and their deviation from the desired trajectories. An average of recorded gaits obtained from healthy subjects is used as reference input. The objective of this work is to develop a control strategy that can trigger the gait initiation from the user’s intention and maintain the dynamic stability, using an efficient real-time stiffness adaptation for multiple joints, simultaneously maintaining their synchronization. The algorithm has been tested with five healthy subjects showing its efficient behavior in initiating the gait and maintaining the equilibrium while walking in presence of external forces. The work is performed as a preliminary study to assist patients suffering from incomplete Spinal cord injury and Stroke.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Yan, T., Cempini, M., Oddo, C.M., Vitiello, N.: Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robotics and Autonomous Systems 64, 120–136 (2015)
Marchal-Crespo, L., Reinkensmeyer, D.: Review of control strategies for robotic movement training after neurologic injury. Journal of NeuroEngineering and Rehabilitation 6(20) (2009)
Novak, D., et al.: Automated detection of gait initiation and termination using wearable sensors. Medical Engineering and Physics 35, 1713–1720 (2013)
Hasani, W., Mohammed, S., Rifaï, H., Amirat, Y.: Powered orthosis for lower limb movements assistance and rehabilitation. Control Engineering Practice 26, 245–253 (2014)
Noda, T., et al.: Brain-controlled exoskeleton robot for BMI rehabilitation. In: 12th IEEE RAS International Conference on Humanoid Robots, Osaka, Japan, pp. 21–27 (2012)
Wang, S., et al.: Design and Control of the MINDWALKER exoskeleton. IEEE Transactions on Neural Systems and Rehabilitation Engineering 23(2), 277–286 (2015)
Kawamoto, H., et al.: Voluntary motion support control of robot suit HAL triggered by bioelectrical signal for hemiplegia. In: 32nd International Conference of the IEEE EMBS, Buenos, Aires, pp. 462–466 (2010)
Aach, M., et al.: Voluntary driven exoskeleton as a new tool for rehabilitation in chronic spinal cord injury: a pilot study. The Spine Journal 14, 2847–2853 (2014)
Kazerooni, H., Racine, J.L., Huang, L., Steger, R.: On the control of the Berkeley lower extremity exoskeleton (BLEEX). In: IEEE International Conference on Robotics and Automation, ICRA, pp. 4353–4360 (2005)
van Dijk, W., van der Kooij, H.: XPED2: A passive exoskeleton with artificial tendons. IEEE Robotics and Automation Magazine, 56–61, December 2014
Strausser, K.A., Kazerooni, H.: The development and testing of a human machine interface for a mobile medical exoskeleton. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, pp. 4911–4916 (2011)
Talaty, M., Esquenazi, A., Briceño, J.E.: Differentiating ability in users of the rewalk powered exoskeleton. In: IEEE International Conference on Rehabilitation Robotics, Seattle, USA, pp. 1–5 (2013)
Bortole, M., Del-Ama, A.J., Rocon, E., Moreno, J.C., Brunetti, F., Pons, J.L.: A robotic exoskeleton for overground gait rehabilitation. In: IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, pp. 3356–3361 (2013)
Rajasekaran, V., Aranda, J., Casals, A.: Recovering planned trajectories in robotic rehabilitation therapies under the effect of disturbances. International Journal of System Dynamics Applications 3(2), 34–49 (2014)
Rajasekaran, V., Aranda, J., Casals, A., Pons, J.L.: An Adaptive control strategy for postural stability using a wearable exoskeleton. Robotics and Autonomous Systems 73, 16–23 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Rajasekaran, V., Aranda, J., Casals, A. (2016). User Intention Driven Adaptive Gait Assistance Using a Wearable Exoskeleton. In: Reis, L., Moreira, A., Lima, P., Montano, L., Muñoz-Martinez, V. (eds) Robot 2015: Second Iberian Robotics Conference. Advances in Intelligent Systems and Computing, vol 418. Springer, Cham. https://doi.org/10.1007/978-3-319-27149-1_23
Download citation
DOI: https://doi.org/10.1007/978-3-319-27149-1_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-27148-4
Online ISBN: 978-3-319-27149-1
eBook Packages: Computer ScienceComputer Science (R0)