
Abstract
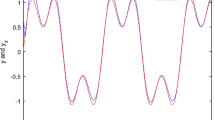
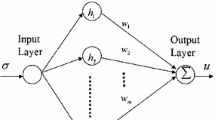
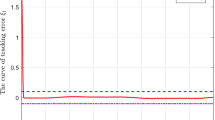
This chapter focuses on the neural network(NN)-based adaptive tracking control issue for a class of high-order nonlinear systems both subjected to the immeasurable state variables and unknown external disturbance as well as the actuator failures. Combining with the radial basis function neural networks(RBF NNs), the composite disturbance observer and state observer are established, respectively. Besides that, so as to c at ope with the sparsity of the control resources, the event-triggered control strategy is applied. The purpose of this work is to develop neural network-based adaptive tracking control schemes such that the output of nonlinear systems ultimately tracks that of the desired target and all the signals of the closed-loop systems are semiglobally uniformly ultimately bounded by utilizing the back-step** technique. Finally, the numerical example is performed to verify the efficacy of the proposed approach.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others
References
Narendra, K.S., Parthasarathy, K.: Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Netw. 1(1), 4–27 (1990)
Narenndra, K.S., Mukhopadhyay, S.: Adaptive control of nonlinear multivariable systems using neural networks. Neural Netw. 7(5), 737–752 (1994)
Georgi, M., Dimirovski: From recurrent neural networks to human neural networks and back: a computational cybernetics. In: 2018 International Conference on Electronics, Telecommunications, Automation, Informatics and Computer Science (2018). Accessed 20-22 September 2018
Ge, Q.B., Yang, Q.M., Zhuo, P., Liu, G.L., Tang, S.S.: Genetic algorithm-based sensor allocation with nonlinear centralized fusion observable degree. IEEE Trans. Neural. Netw. Learn. Syst. 30(12), 3665–3673 (2020)
Cui, B., **a, Y.Q., Liu, K., Shen, G.H.: Finite-time tracking control for a class of uncertain strict-feedback nonlinear systems with state constraints: a smooth control approach. IEEE Trans. Neural. Netw. Learn. Syst. 31(11), 4920–4932 (2020)
Meng, W.C., Yang, Q.M., Jagannathan, S., Sun, Y.X.: Distributed control of high-order nonlinear input constrained multiagent systems using a backstep**-free method. IEEE Trans. Cybern. 49(11), 3923–3933 (2019)
Cui, B., **a, Y.Q., Liu, K., Wang, Y.J., Zhai, D.H.: Velocity-observer-based distributed finite-time attitude tracking control for multiple uncertain rigid spacecraft. IEEE Trans. Ind. Inf. 16(4), 2509–2519 (2020)
Yang, Q.M., Jagannathan, S., Sun, Y.X.: Robust integral of neural network and error sign control of MIMO nonlinear systems. IEEE Trans. Neural. Netw. Learn. Syst. 26(12), 3278–3286 (2015)
Yang, Q.M., Ge, S.S., Sun, Y.X.: Adaptive actuator fault tolerant control for uncertain nonlinear systems with multiple actuators. Automatica 60, 92–99 (2015)
Rao, H.X., Liu, F., Peng, H., Xu, Y., Lu, R.Q.: Observer-based impulsive synchronization for neural networks with uncertain exchanging information. IEEE Trans. Neural Netw. Learn. Syst. to be published (2019). https://doi.org/10.1109/TNNLS.2019.2946151
Shang, Y., Chen, B., Lin, C.: Consensus tracking control for distributed nonlinear multiagent systems via adaptive neural backstep** approach. IEEE Trans. Syst. Man, Cybern., Syst. to be published (2018). https://doi.org/10.1109/TSMC.2018.28169282018
Yoo, S.J.: Distributed consensus tracking for multiple uncertain nonlinear strict-feedback systems under a directed graph. IEEE Trans. Neural. Netw. Learn. Syst. 24(4), 666–672 (2013)
Yang, Y., Tan, J., Yue, D., ** approach. Inf. Sci. 369, 748–764 (2016)
Zhou, B., Song, Q.: Boundedness and complete stability of complex-valued neural networks with time delay. IEEE Trans. Neural. Netw. Learn. Syst. 24(8), 1227–1238 (2013)
Rao, H.X., Xu, Y., Peng, H., Lu, R.Q., Su, C.Y.: Quasi-synchronization of time delay Markovian jump neural networks with impulsive driven transmission and fading channels. IEEE Trans. Cybern. (2019). https://doi.org/10.1109/TCYB.2019.2941582
Yang, Y., Xu, H.W., Yue, D.: Observer-Based distributed secure consensus control of a class of linear multi-agent systems subject to random attacks. IEEE Trans. Circuits Syst. I, Reg. Pap. 66(8), 3089–3099 (2019)
Chen, B., Lin, C., Liu, X.P., Liu, K.F.: Observer-based adaptive fuzzy control for a class of nonlinear delayed systems. IEEE Trans. Syst. Man, Cybern. Syst. 46(1), 27–36 (2016)
Chen, C.L.P., Wen, G.X., Liu, Y.J., Liu, Z.: Observer-based adaptive backstep** consensus tracking control for high-order nonlinear semi-strict-feedback multiagent systems. IEEE Trans. Cybern. 46(7), 1591–1601 (2016)
Wang, K., Liu, Y., Liu, Liu X.P.., **g, Y.W., Dimirovski, G.M.: Study on TCP/AQM network congestion with adaptive neural network and barrier Lyapunov function. Neurocomputing 363, 27–34 (2019)
Wang, K., **g, Y.W., Liu, Y., Liu, X.P., Dimirovski G.M.: Adaptive finite-time congestion controller design of TCP/AQM systems based on neural network and funnel control. Neural Comput. Appl. 30(13), 9471–9478 (2020)
Chen, B., Zhang, H.G., Liu, X.P., Lin, C.: Neural observer and adaptive neural control design for a class of nonlinear systems. IEEE Trans. Neural. Netw. Learn. Syst. 29(8), 4261–4271
Zhang, Y.H., Sun, J., Liang, H.J., Li, H.Y.: Event-triggered adaptive tracking control for multiagent systems with unknown disturbances. IEEE Trans. Cybern. to be published (2018). https://doi.org/10.1109/TCYB.2018.2869084
Wang, A.Q., Liu, L., Qiu, J.B., Feng, G.: Event-triggered robust adaptive fuzzy control for a class of nonlinear systems. IEEE Trans. Fuzzy Syst. 27(8), 1648–1658 (2019)
Qiu, J.B., Sun, K.K., Wang, T., Gao, H.J.: Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 27(11), 2152–2162 (2019)
Li, Y.X., Yang, G.H.: Adaptive neural control of pure-feedback nonlinear systems with event-triggered communication. IEEE Trans. Neural Netw. Learn. Syst. 29(12), 6242–6251 (2018)
Li, Y.X., Tong, S.C., Yang, G.H.: Observer-based adaptive fuzzy decentralized event-triggered control of interconnected nonlinear system. IEEE Trans. Cybern. to be publised. https://doi.org/10.1109/TCYB.2019.2894024
Chen, M., Ge, S.S.: Adaptive neural output feedback control of uncertain nonlinear systems with unknown hysteresis using disturbance observer. IEEE Trans. Ind. Electron. 62(12), 7706–7716 (2015)
Min, H.F., Xu, S.Y., Ma, Q., Zhang, B.Y., Zhang, Z.Q.: Composite-observer-based output-feedback control for nonlinear time-delay systems with input saturation and its application. IEEE Trans. Ind. Electron. 65(7), 5856–5863 (2017)
Wang, L.J., Basin, M.V., Li, H.Y., Lu, R.Q.: Observer-based composite adaptive fuzzy control for nonstrict-feedback systems with actuator failures. IEEE Trans. Fuzzy Syst. 26(4), 2336–2347 (2018)
Liu, W.H., Li, P.: Disturbance observer based fault-tolerant adaptive control for nonlinearly parameterized systems. IEEE Trans. Ind. Electron. 66(11), 8681–8891 (2019)
Zhang, C.H., Yang, G.H.: Event-triggered adaptive output feedback control for a class of uncertain nonlinear systems with actuator failures. IEEE Trans. Cybern. 50(1), 201–210 (2020)
Li, Y.X., Yang, G.H.: Observer-based fuzzy adaptive event-triggered control codesign for a class of uncertain nonlinear system. IEEE Trans. Fuzzy Syst. 26(3), 1589–1599 (2018)
Wang, C.L., Guo, L., Wen, C.Y., Hu, Q.L., Qiao, J.Z.: Event-triggered adaptive attitude tracking control for spacecraft with unknown actuator faults. IEEE Trans. Ind. Electron. 67(3), 2241–2250 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Wang, X., Huang, T., Chakrabarti, P. (2022). Adaptive RBF Neural Network Control for Nonlinear System. In: Shi, P., Stefanovski, J., Kacprzyk, J. (eds) Complex Systems: Spanning Control and Computational Cybernetics: Foundations. Studies in Systems, Decision and Control, vol 414. Springer, Cham. https://doi.org/10.1007/978-3-030-99776-2_22
Download citation
DOI: https://doi.org/10.1007/978-3-030-99776-2_22
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-99775-5
Online ISBN: 978-3-030-99776-2
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)