
Abstract
Electronic interfaces indeed determine the ultimate performances of MEMS sensors, whatever the final application (in the automotive, medical, and industrial market). As a matter of fact, micrometer-scale sensors do show very tiny signals in response to the external mechanical stimuli. For example, a capacitive accelerometer may have a proof mass of less than 10−7grams, thus making its output (differential imbalance) lower than 1aF once the device is excited by 1 mg acceleration, needless to comment that severe challenges are there in order to implement a proper low-noise sensor front-end.
But the role of the IC for MEMS goes further beyond a basic signal readout (even if very complex, as just described, having the need to amplify and condition extremely small outputs from transducers). Interface circuits do need to implement the calibration functions, as well as the built-in self-test, and, more and more often nowadays, the analog-to-digital conversion, the temperature and amplitude compensation, the fusion of different sensor signals, the local processing required to off-load external micro-processors, etc.
Last, but not least, sensor interfaces could have to play – at the same time – a role of actuators! Why? Because some transducers are requiring a mechanical excitation in order to detect a physical stimulus; this is the case, for example, of a Coriolis-Vibration-Gyroscope (CVG) that needs a precise periodic motion at its resonance frequency to become sensitive to angular velocity. Moreover, electrostatic actuators may substitute for mechanical springs; this is because the electric signal could serve as an appropriate way to modify spring stiffness and has no analogous in the mechanical domain. This solution is frequently implemented in CVGs to tune and match sense and drive resonance frequencies to a level that goes far beyond any practical fabrication capability. Electrostatic actuation is also widely used in closed-loop capacitive accelerometer to extend the natural sensor bandwidth without compromising its mechanical sensitivity.
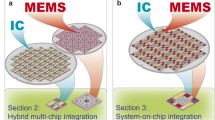
Despite monolithic integration of transducers and circuits that are definitely possible and currently available on the market, a MEMS sensor is commonly realized with separate dice in single package; this kind of implementation does offer the undeniable advantage of giving engineers the possibility to optimize the process and the design of the electronics with much more flexibility. But on the other hand, the multi-chip solution does increase the stray capacitances between the actual transducer and the pickup circuits (due to the needed pads and wires), thus creating challenging issues; for that reason, a careful sensor front-end design is definitely needed in order to be parasitic insensitive and to avoid problems of signal attenuation (that could so potentially determine a poor sensor resolution).
The sensors world is so various and complex that this chapter cannot pretend to cover all the possible variants and implementations; instead, the purpose of this section is to provide the reader with very useful and practical examples about performance-driven sensor IC design, showing critical guidelines about the possible architecture to be adopted, and supplying a deep description of the factors that could limit the performances of the real-life sensor readout circuits.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others
References
Barbieri, A., & Pernici, S. (2016, September). A differential difference amplifier with dynamic resistive degeneration for MEMS microphones. In Proceedings of ESSCIRC (pp. 285–288). Losanne, Switzerland.
Gaggl, R., & Buffa, C. (2017). Silicon microphones: from concept to design. Topics on Microelectronics, XI, 95.
Barbieri, F., Barbieri, A., & Nicollini, G. (2018, April). Pseudo-differential analog readout circuit for MEMS microphones performing 135dBSPL AOP and 66dBA SNR @1Pa. In Proceedings of CICC, San Diego, CA, USA.
Pinna, C. (2014, November 18). Multi-Level Sigma-Delta ADC with reduced quantization levels. Patent No. US 8890735B2.
Nguyen, K., Adams, R., Sweetland, K., & Chen, H. (2005, December). A 106-dB SNR Hybrid Oversampling Analog-to-Digital Converter for Digital Audio. IEEE JSCC, 40(12).
Bach, E., et al. (2017, Febraury). A 1.8 V true-differential 140 dB SPL full-scale standard CMOS MEMS digital microphone exhibiting 67 dB SNR. In IEEE ISSCC Dig. Tech. Papers (pp. 166–167).
Pinna, C., Mecchia, A., & Pesenti, P. (2011, December 22). Digital microphone device with extended dynamic range. Patent No. EP2608569B1.
Lemkin, M. A., & Boser, B. E. (1999). A three axis micromachined accelerometer with a CMOS position-sense interface and digital offset-trim electronics. IEEE Journal of Solid-State Circuits, 34(4), 456–468.
Enz, C. C., & Temes, G. C. (1996). Circuit techniques for reducing the effects of op-amp imperfections: Autozeroing, correlated double sampling and chopper stabilization. Proceedings of the IEEE, 84(11), 1584–1614.
Makinwa, K. Dynamic offset-cancellation techniques. [Online] Available: https://ieee-sensors.org/wp-content/uploads/2011/archive/Tutorials/makinwa.pdf
Kevin, T., Chai, C., Han, D., Singh, R. P., Pham, D. D., Pang, C. Y., Luo, J. W., Nuttman, D., & Je, M. 118-dB dynamic range, continuous-time, opened-loop capacitance to voltage converter readout for capacitive MEMS accelerometer. In IEEE Asian Solid-State Circuits Conference November 8–10,2010/Bei**g, China.
Andrea, B., Gola, A., Chiesa, E., Lasalandra, E., Pasolini, F., Tronconi, M., & Ungaretti, T. (2003). A 1-g dual-Axis linear accelerometer in a standard 0.5-μm CMOS technology for high-sensitivity applications. IEEE Journal of Solid-State Circuits, 38(7), 1292–1297.
Nag, D. (2016). A 6 nV/√Hz high precision front-end with sub-μV input offset for MEMS accelerometer. IEEE 978-1-4673-9019-4/16.
Huang, J., Zhang, T., Zhao, M., Hong, L., Zhang, Y., Lu, W., & Chen, Z. (2012). Yilong Hao ‘‘time divided architecture for closed loop MEMS capacitive accelerometer. IEEE 978-1-4673-2475-5/12.
Liu, Y., Liu, X., Liang, Y., Chen, W., & Wu, Q. (2009). CMOS interface circuitry for a closed-loop capacitive MEMS accelerometer. In Proceedings of the 2009 4th IEEE International Conference on Nano/Micro Engineered and Molecular Systems January 5–8, 2009, Shenzhen, China.
Xu, H., Liu, X., & Liang, Y. (2015). A closed-loop interface for a high-Q micromechanical capacitive accelerometer with 200 ng/Hz input noise density. IEEE Journal of Solid-State Circuits, 50(9), 2101–2112.
Amini, S., & Johns, D. A. (2015). A flexible charge-balanced ratiometric open-loop readout system for capacitive inertial sensors. IEEE Transactions on Circuits and Systems – II: Express Briefs, 62(4), 317–321.
Langfelder, G., Frizzi, T., Longoni, A., Tocchio, A., Manelli, D., & Lasalandra, E. (2011). Readout of MEMS capacitive sensors beyond the condition of pull-in instability. Sensors and Actuators A.
Lajevardi, P., Petkov, V., & Murmann, B. A ΔΣ interface for MEMS accelerometers using electrostatic spring-constant modulation for cancellation of bondwire capacitance drift. In 2012 IEEE International Solid-State Circuits Conference.
Yazdi, N., Ayazi, F., & Najafi, K. (1998). Micromachined inertial sensors. Proceedings of the IEEE, 86(8), 1640–1659.
Geen, J. A., et al. (2002). Single-chip surface micromachined integrated gyroscope with 50 =h allan deviation. IEEE Journal of Solid-State Circuits, 37(12), 1860–1866.
Balachandran, G. K., Petkov, V. P., Mayer, T., & Balslink, T. (2016). A 3-axis gyroscope for electronic stability control with continuous self-test. IEEE Journal of Solid-State Circuits, 51(1), 177–186.
Boser, B. E. (1997, June). Electronics for micromachined inertial sensors. In Tech. Dig. 9th Int. Conf. Solid-state sensors and actuators (Transducers’97), Chicago, IL, USA (pp. 1169–1172).
Dickson, J. F. (1976). On-chip high-voltage generation in MNOS integrated circuits using an improved voltage multiplier technique. IEEE Journal of Solid-State Circuits, SC-11(3), 374–378.
Favrat, P., Deval, P., & Declercq, M. J. (1998). A high-efficiency CMOS voltage doubler. IEEE Journal of Solid-State Circuits, 33(3), 410–416.
Omar, A., Elshennawy, A., Ismail, A., Nagib, M., Elmala, M., & Elsayed, A. (2015). A new versatile hardware platform for closed-loop gyro evaluation. In Proceedings of the Inertial Sensors and Systems 2015 (DGON ISS), Karlsruhe, Germany, 22–23 September 2015.
Eminoglu, B., Alper, S., & Akin, T. (2011). Novel, simple, and q-independent self-oscillation loop designed for vibratory MEMS gyroscopes. In Proceedings of 16th International Solid-State Sensors, Actuators and Microsyst. Conf. (pp. 1440–1443).
Rombach, S., Marx, M., Nessler, S., De Dorigo, D., Maurer, M., & Manoli, Y. (2016). An interface ASIC for MEMS vibratory gyroscopes with a power of 1.6 mW, 92 dB DR and 0.007 °/s/√Hz noise floor over a 40 Hz band. IEEE Journal of Solid-State Circuits, 51(8), 1915–1927.
Seeger, J., et al. (2010). Development of high-performance, high-volume consumer MEMS gyroscopes. Solid-State Sensors, Actuators and Microsystems Workshop, 61–64.
Prandi, L., et al. (2011). A low-power 3-Axis digital-output MEMS gyroscope with single drive and multiplexed angular rate readout. ISSCC Dig. Tech. Papers, 104–105.
Pertijs, M. A. P., Makinwa, K. A. A., & Huijsing, J. H. (2005). A CMOS smart temperature sensor with a 3σ inaccuracy of ±0.1 °C from −55 °C to 125°C. IEEE Journal of Solid-State Circuits, 40(12), 2805–2815.
Pertijs, M. A. P., & Huijsing, J. H. (2005). Precision interface for a CMOS smart temperature sensor. IEEE, 943–946.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Ungaretti, T., Pernici, S., De Pascalis, D., Fang, D., Maiore, M., Pelligra, G. (2022). Electronic Sensors Front-End. In: Vigna, B., Ferrari, P., Villa, F.F., Lasalandra, E., Zerbini, S. (eds) Silicon Sensors and Actuators. Springer, Cham. https://doi.org/10.1007/978-3-030-80135-9_22
Download citation
DOI: https://doi.org/10.1007/978-3-030-80135-9_22
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-80134-2
Online ISBN: 978-3-030-80135-9
eBook Packages: EngineeringEngineering (R0)