
Abstract
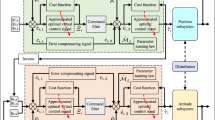
This paper discusses the neural adaptive composite learning finite-time control for a quadrotor unmanned aerial vehicle (QUAV). Based on the command filter backstep** control (CFBC) scheme, the computational complexity caused by repetitive derivation and the inverse effect of the filter error are effectively removed. Moreover, the neural networks (NNs) are employed to identify the nonlinear coupling terms in the controlled vehicle, and the prediction error is introduced to adjust the composite learning law of neural weights, which improves the learning ability of NNs. Then, an adaptive neural composite learning finite-time prescribed performance controller is designed to achieve the convergence constraint on the tracking error, which makes the tracking error always in the planned steady-state region, and all variables of the closed-loop system are practical finite-time bounded. Finally, simulation results are shown to demonstrate the validity of the proposed method.
This work was supported in part by the National Natural Science Foundation of China under Grants 62203153, and in part by the Natural Science Fund for Young Scholars of Henan Province under Grant 222300420151.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Yacef, F., Bouhali, O., Hamerlain, M., Rizoug, N.: Observer-based adaptive fuzzy backstep** tracking control of quadrotor unmanned aerial vehicle powered by Li-ion battery. J. Intell. Rob. Syst. 84, 179–197 (2016)
** control of a quadcopter with uncertain vehicle mass, moment of inertia, and disturbances. IEEE Trans. Ind. Electron. 69(1), 549–559 (2022)
Zhang, X., Wang, Y., Zhu, G., Chen, X., Li, Z., Wang, C., Su, C.: Compound adaptive fuzzy quantized control for quadrotor and its experimental verification. IEEE Trans. Cybern. 51(3), 1121–1133 (2021)
Guettal, L., Chelihi, A., Ajgou, R., Touba, M.M.: Robust tracking control for quadrotor with unknown nonlinear dynamics using adaptive neural network based fractional-order backstep** control. J. Franklin Inst. 359(14), 7337–7364 (2022)
Liu, S., Wang, H., Li, T.: Adaptive composite dynamic surface neural control for nonlinear fractional-order systems subject to delayed input. ISA Trans. 134, 122–133 (2023)
Zhu, G., Ma, Y., Li, Z., Malekian, R., Sotelo, M.: Dynamic event-triggered adaptive neural output feedback control for MSVs using composite learning. IEEE Trans. Intell. Transp. Syst. 24(1), 787–800 (2023)
Peng, J., Ding, S., Dubay, R.: Adaptive composite neural network disturbance observer-based dynamic surface control for electrically driven robotic manipulators. Neural Comput. Appl. 33, 6197–6211 (2021)
Hua, C., Chen, J., Guan, X.: Dynamic surface based tracking control of uncertain quadrotor unmanned aerial vehicles with multiple state variable constraints. IET Control Theory Appl. 13(4), 526–533 (2019)
Liu, K., Wang, R.: Antisaturation command filtered backstep** control-based disturbance rejection for a quadarotor UAV. IEEE Trans. Circuits Syst. II Express Briefs 68(12), 3577–3581 (2021)
Sun, P., Song, X., Song, S., Stojanovic, V.: Composite adaptive finite-time fuzzy control for switched nonlinear systems with preassigned performance. Int. J. Adapt. Control Signal Process. 37(3), 771–789 (2023)
Song, S., Park, J.H., Zhang, B., Song, X.: Adaptive NN finite-time resilient control for nonlinear time-delay systems with unknown false data injection and actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 33(10), 5416–5428 (2022)
Yang, W., Cui, G., Ma, Q., Ma, J., Tao, C.: Finite-time adaptive event-triggered command filtered backstep** control for a QUAV. Appl. Math. Comput. 423, 126898 (2022)
Xu, B.: Composite learning finite-time control with application to quadrotors. IEEE Trans. Syst. Man Cybern. Syst. 48(10), 1806–1815 (2018)
Hua, C., Chen, J., Guan, X.: Adaptive prescribed performance control of QUAVs with unknown time-varying payload and wind gust disturbance. J. Franklin Inst. 355(14), 6323–6338 (2018)
Chen, Q., Ye, Y., Hu, Z., Na, J., Wang, S.: Finite-time approximation-free attitude control of quadrotors: theory and experiments. IEEE Trans. Aerosp. Electron. Syst. 57(3), 1780–1792 (2021)
Zhao, X., Tian, B., You, M., Ma, L.: Adaptive distributed sliding mode control for multiple unmanned aerial vehicles with prescribed performance. IEEE Trans. Veh. Technol. 71(11), 11480–11490 (2022)
Cui, G., Yang, W., Yu, J., Li, Z., Tao, C.: Fixed-time prescribed performance adaptive trajectory tracking control for a QUAV. IEEE Trans. Circuits Syst. II Express Briefs 69(2), 494–498 (2022)
Liu, Y., Liu, X., **g, Y.: Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance. Inf. Sci. 468, 29–46 (2018)
Song, X., Wu, C., Stojanovic, V., Song, S.: 1 bit encoding-decoding-based event-triggered fixed-time adaptive control for unmanned surface vehicle with guaranteed tracking performance. Control. Eng. Pract. 135, 105513 (2023)
Yu, J., Shi, P., Zhao, L.: Finite-time command filtered backstep** control for a class of nonlinear systems. Automatica 92, 173–180 (2018)
Qian, C., Lin, W.: Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Syst. Control Lett. 42(3), 185–200 (2001)
Chen, M., Wang, H., Liu, X.: Adaptive fuzzy practical fixed-time tracking control of nonlinear systems. IEEE Trans. Fuzzy Syst. 29(3), 664–673 (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Wu, C., Song, S. (2024). Adaptive Neural Composite Learning Finite-Time Control for a QUAV with Guaranteed Tracking Performance. In: Sun, F., Meng, Q., Fu, Z., Fang, B. (eds) Cognitive Systems and Information Processing. ICCSIP 2023. Communications in Computer and Information Science, vol 1919. Springer, Singapore. https://doi.org/10.1007/978-981-99-8021-5_5
Download citation
DOI: https://doi.org/10.1007/978-981-99-8021-5_5
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-8020-8
Online ISBN: 978-981-99-8021-5
eBook Packages: Computer ScienceComputer Science (R0)