
Abstract
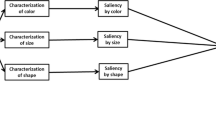
A visual attention method for object search for a mobile robot with an Omni-directional vision system is presented. Firstly, the explored scene is separated into salient and non-salient regions in the image and some salient objects in above salient regions are detected with a kind of saliency detection method. And then, SIFT feature points of the salient objects are extracted. The 3D coordinates of the object feature points, which are used to represent the spatial positions of the objects, are computed from the Omni-directional 3D reconstruction method. At last, the first searching region is determined by synthetically considering some factors, such as the number of detected objects in each region and the distance between the objects and the mobile robot. To validate the effectiveness of the proposed method, the experiment is performed in a realistic indoor scenario.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
The semantic robot vision challenge, http://www.semantic-robot-vision-challenge.org/
Website, http://www.robocupathome.org/
Saidi, F., Stasse, O., Yokoi, K., Kanehiro, F.: Online Object Search with a Humanoid Robot. In: The 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1677–1682. IEEE Press, New York (2007)
Masuzawa, H., Miura, J.: Observation Planning for Efficient Environment Information Summarization. In: The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5794–5800. IEEE Computer Society Press, St. Louis (2009)
Forssen, P., Meger, D., Lai, K., Helmer, S., Little, J., Lowe, D.: Informed Visual Search: Combining Attention and Object Recognition. In: 2008 IEEE International Conference on Robotics and Automation, pp. 935–942. IEEE Press, New York (2008)
Lima, P., Bonarini, A., et al.: Omni-directional Catadioptric Vision for Soccer Robots. Robotics and Autonomous Systems. J. Robot. Autonomous Syst. 36, 87–102 (2001)
Koyasu, H., Miura, J., Shirai, Y.: Mobile Robot Navigation in Dynamic Environments Using Omnidirectional Stereo. In: 2003 IEEE International Conference on Robotics and Automation, pp. 893–898. IEEE Press, New York (2008)
Runschotem, R., Krose, B.: Robust Scene Reconstruction From an Omnidirectional Vision System. IEEE Trans. Rob. Autom. 19, 351–357 (2003)
Ortegon-Aguilar, J., Bayro-Corrochano, E.: Omnidirectional Vision Tracking with Particle Filter. In: 18th International Conference on Pattern Recognition, pp. 1115–1118. IEEE Press, Piscataway (2006)
Hou, X., Zhang, L.: Saliency detection: A Spectral Residual Approach. In: The IEEE Conference on Computer Vision and Pattern Recognition, pp. 1–8. Inst. of Elec. and Elec. Eng. Computer Society Press, Piscataway (2007)
Choi, C., Christensen, H.I.: Cognitive Vision for Efficient Scene Processing and Object Categorization in Highly Cluttered Environments. In: 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4267–4274. IEEE Computer Society Press, Piscataway (2009)
Svoboda, T., Pajdla, T.: Epipolar Geometry for Central Catadioptric Cameras. International Journal of Computer Vision 49, 23–37 (2002)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Lin, D., He, B. (2011). Application of Visual Attention in Object Search for a Mobile Robot with an Omni-directional Vision System. In: Tan, H. (eds) Informatics in Control, Automation and Robotics. Lecture Notes in Electrical Engineering, vol 132. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-25899-2_44
Download citation
DOI: https://doi.org/10.1007/978-3-642-25899-2_44
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-25898-5
Online ISBN: 978-3-642-25899-2
eBook Packages: EngineeringEngineering (R0)