
Abstract
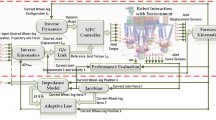
In this paper, a novel traction control scheme for a mobile robot with six independent driven wheels on loose soil is presented. First, a robust model-based slide mode controller is designed to estimate the traction force F x , F y and steering moment M z for executing a desired motion of the robot body. Because of actuation redundancy, the degree of freedom of task space is lower than the number of wheel drive variables, the paper uses an improved pseudo-inverse matrix to compute the tractive forces of the redundant drive wheels. In view of each wheel’s slip behavior on loose soil, a slip compensation term is developed to correct the output of slide mode controller. The simulations show clearly the advantage of the traction control versus traditional kinematic control.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Iagnemma, K., Dubowsky, S.: Traction control of wheeled robotic vehicles in rough terrain with application to planetary rovers. The International Journal of Robotics Research 23, 1029–1040 (2004)
Tarokh, M., McDermott, G.J.: Kinematics modeling and analyses of articulated rovers. IEEE Transactions on Robotics 21, 539–553 (2005)
Emami, M.R., Goldenberg, A.A., Turksen, I.B.: Systematic design and analysis of fuzzy-logic control and application to robotics, Part II. Control. Robotics and Autonomous Systems 33, 89–108 (2000)
Park, D.I., Lee, S.H., Kim, S.H., Kwak, Y.K.: Torque distribution using a weighted pseudoinverse in a redundantly actuated mechanism. Advanced Robotics 17, 807–820 (2003)
Li, Y.P., Oetomo, D., Ang Jr., M.H., Lim, C.W.: Torque distribution and slip minimization in an omnidirectional mobile base. In: 2005 12th International Conference on Advanced Robotics, pp. 567–572. IEEE Press, Seattle (2005)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2008 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Lei, Z., Cui, P., Ju, H., Peng, X. (2008). Traction Control on Loose Soil for a Redundantly Actuated Mobile Robot. In: **ong, C., Huang, Y., **ong, Y., Liu, H. (eds) Intelligent Robotics and Applications. ICIRA 2008. Lecture Notes in Computer Science(), vol 5314. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-88513-9_123
Download citation
DOI: https://doi.org/10.1007/978-3-540-88513-9_123
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-88512-2
Online ISBN: 978-3-540-88513-9
eBook Packages: Computer ScienceComputer Science (R0)