
Abstract
Multibody dynamics deals with the study of mechanical systems composed of multiple bodies, whose motion interactions are governed by the presence of kinematic constraints and by the application of external forces.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others
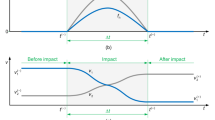

Multibody dynamics deals with the study of mechanical systems composed of multiple bodies, whose motion interactions are governed by the presence of kinematic constraints and by the application of external forces. The prediction of the dynamic behavior of multibody systems typically involves the formulation of the governing equations of motion and the numerical evaluation of their kinematic and dynamic characteristics. Thus, this talk focuses on the application of multibody dynamics methodologies in the fields of mechanical and biomedical engineering. For that purpose, the main ingredients related to the formulations of multibody systems with contact-impact events is presented. In the sequel of this process, special attention is given to the regularized or continuous models to treat frictional contacts. Moreover, relevant numerical ingredients associated with contact-impact phenomena in multibody dynamics are examined with the intent to discuss computational accuracy and efficiency. Finally, results for some multibody systems in the context of mechanical and biomedical engineering are utilized to discuss the potential of applications of the multibody dynamics tool in these two emerging scientific areas.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Flores, P. (2024). Multibody Dynamics with Contact-Impact Events: Roots, Models and Applications. In: Youssef, E.S.E., Tokhi, M.O., Silva, M.F., Rincon, L.M. (eds) Synergetic Cooperation Between Robots and Humans. CLAWAR 2023. Lecture Notes in Networks and Systems, vol 810. Springer, Cham. https://doi.org/10.1007/978-3-031-47269-5_2
Download citation
DOI: https://doi.org/10.1007/978-3-031-47269-5_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-47268-8
Online ISBN: 978-3-031-47269-5
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)