
Abstract
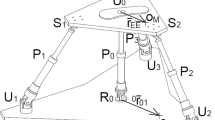
This paper presents a new type of flexible planar parallel manipulator, which driven by three motors. Compared to the conventional robot, this robot realizes planar degrees of freedom through the elastic rod deformation. Based on this principle, the prototype was designed and produced, and its workspace was analyzed by motion capture experiments. The repeating position accuracy is 0.0771 mm. With high-precision and high-load characteristics, this robot can protect the workpiece when the load exceeds its threshold. It can accomplish difficult tasks for rigid robots, such as inserting shafts into holes or grabbing fragile items, as shown in the demo.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Albu-Schaffer, A., et al.: Soft robotics. IEEE Robot. Autom. Mag. 15(3), 20–30 (2008)
Bao, G., et al.: Soft robotics: academic insights and perspectives through bibliometric analysis. Soft Robot. 5(3), 229–241 (2018)
Bicchi, A., Tonietti, G.: Fast and “soft-arm” tactics [robot arm design]. IEEE Robot. Autom. Mag. 11(2), 22–33 (2004)
Chen, G., Zhang, Z., Wang, H.: A general approach to the large deflection problems of spatial flexible rods using principal axes decomposition of compliance matrices. J. Mech. Robot. 10(3), 031012 (2018)
Choi, J., Hong, S., Lee, W., Kang, S., Kim, M.: A robot joint with variable stiffness using leaf springs. IEEE Trans. Robot. 27(2), 229–238 (2011)
Goris, K., Saldien, J., Vanderborght, B., Lefeber, D.: How to achieve the huggable behavior of the social robot probo? A reflection on the actuators. Mechatronics 21(3), 490–500 (2011)
Hong, M.B., Choi, Y.J.: Design method of planar three-degrees-of-freedom serial compliance device with desired compliance characteristics. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 226(9), 2331–2344 (2012)
Hughes, J., Culha, U., Giardina, F., Guenther, F., Rosendo, A., Iida, F.: Soft manipulators and grippers: a review. Front. Robot. AI 3, 69 (2016)
Khan, S.G., Herrmann, G., Pipe, T., Melhuish, C., Spiers, A.: Safe adaptive compliance control of a humanoid robotic arm with anti-windup compensation and posture control. Int. J. Soc. Robot. 2(3), 305–319 (2010)
Kuo, P.H., Deshpande, A.D.: A novel joint design for robotic hands with humanlike nonlinear compliance. J. Mech. Robot. 8(2), 021004 (2016)
Laschi, C., Cianchetti, M.: Soft robotics: new perspectives for robot bodyware and control. Front. Bioeng. Biotechnol. 2, 3 (2014)
Mehdi, H., Boubaker, O.: New robust tracking control for safe constrained robots under unknown impedance environment. In: Herrmann, G., Studley, M., Pearson, M., Conn, A., Melhuish, C., Witkowski, M., Kim, J.-H., Vadakkepat, P. (eds.) TAROS 2012. LNCS (LNAI), vol. 7429, pp. 313–323. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-32527-4_28
Park, J.J., Song, J.B.: A nonlinear stiffness safe joint mechanism design for human robot interaction. J. Mech. Des. 132(6), 061005 (2010)
Shetty, B.R., Ang, M.H.: Active compliance control of a puma 560 robot. In: 1996 IEEE International Conference on Robotics and Automation, 1996. Proceedings, vol. 4, pp. 3720–3725. IEEE (1996)
Van Ham, R., Sugar, T.G., Vanderborght, B., Hollander, K.W., Lefeber, D.: Compliant actuator designs. IEEE Robot. Autom. Mag. 16(3), 81–94 (2009)
Wang, W., Loh, R.N., Gu, E.Y.: Passive compliance versus active compliance in robot-based automated assembly systems. Ind. Robot. Int. J. 25(1), 48–57 (1998)
Whitney, D.E.: Quasi-static assembly of compliantly supported rigid parts. J. Dyn. Syst. Meas. Control 104(1), 65–77 (1982)
Zhao, Y., Yu, J., Wang, H., Chen, G., Lai, X.: Design of an electromagnetic prismatic joint with variable stiffness. Ind. Robot. Int. J. 44(2), 222–230 (2017)
Acknowledgment
This work was jointly supported by the Natural Science Foundation of China under Grant 51875334.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Du, C., Chen, G., Zhang, Z., Tang, L., Wang, H. (2019). Design and Experimental Analysis of a Planar Compliant Parallel Manipulator. In: Yu, H., Liu, J., Liu, L., Ju, Z., Liu, Y., Zhou, D. (eds) Intelligent Robotics and Applications. ICIRA 2019. Lecture Notes in Computer Science(), vol 11744. Springer, Cham. https://doi.org/10.1007/978-3-030-27541-9_52
Download citation
DOI: https://doi.org/10.1007/978-3-030-27541-9_52
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27540-2
Online ISBN: 978-3-030-27541-9
eBook Packages: Computer ScienceComputer Science (R0)