
Abstract
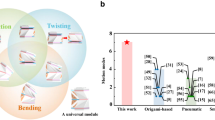
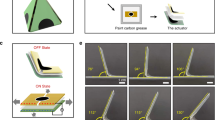
Origami is a traditional art initiated in China, and then, it has been widely used in Japan. Nowadays, many studies oriented on soft-body robotics have focused on origami patterns, since the most significant characteristics of origami robotic systems are compliant and lightweight. And it is well known to all that origami art can emulate some living patterns, such as paper cranes, snakes, and insects. Those we call bioinspired mechanisms can be combined with origami pattern design perfectly. The manipulator used in this paper originated from the elephant trunk, which is a remarkable tool to manipulate diverse objects dexterously despite their dimension, structure, or weight. By applying origami patterns and fabrication, I made a manipulator that can transform from a simple planar plane to a complicated 3D structure with extremely lightweight, reliable compactness, scalable configuration, and a single degree of freedom. Moreover, to combine three such manipulators and make a grasper and realize the simultaneous curling motion of the three “fingers,” I designed a corresponding actuation system and analyzed its capability by theoretical modeling and simulation.































Similar content being viewed by others

Data availability
All data generated or analyzed during this study are included in the manuscript.
Code availability
Not applicable.
References
Asada M, Hosoda K, Kuniyoshi Y, Ishiguro H, Inui T, Yoshikawa Y, Ogino M, Yoshida C (2009) Cognitive developmental robotics: A survey. IEEE Trans Auton Mental Dev 1(1):12–34
Ayvali E, Desai JP (2012) “Towards a discretely actuated steerable cannula. In: ICRA., St. Paul, MN, pp 1614–1619
Bezzo N, Mehta A, Onal CD, Tolley MT (2015) Robot makers: the future of digital rapid design and fabrication of robots. IEEE Robot Autom Mag 22(4):27–36
Buckingham R (2002) Snake arm robots. Ind Robot 29(3):242–245
Callens SJP, Zadpoor AA (2018) From flat sheets to curved geometries: Origami and kirigami approaches. Mater Today 21(3):241–264
Camarillo DB, Milne CF, Carlson CR et al (2008) Mechanics modeling of tendon-driven continuum manipulators. IEEE Trans Robot 24(6):1262–1273
Dillmann R, Asfour T, Cheng G, Ude A (2008) Toward cognitive humanoid robots. Special Issue: Int. J Humanoid Robot 5, 2
Dupont P, Lock J, Butler E (2009) Torsional kinematic model for concentric tube robots. ICRA., Kobe, Japan, pp 3851–3858
EPFL master dissertation by Léo Duggan (2021)
Flint P, Simaan N, Taylor R (2004) High dexterity snake-like robotic slaves for minimally invasive Telesurgery of the upper airway. MICCAI, Saint-Malo, France, pp 17–24
Floreano D, Mattiussi C (2008) Bio-inspired artificial intelligence: theories, methods, and technologies. MIT Press, Cambridge
Godage IS, Nanayakkara T, Caldwell DG (2012) Locomotion with continuum limbs. IROS., Vilamoura, Portugal, pp 293–298
Gravagne I, Walker ID (2002) Manipulability, force, and compliance analysis for planar continuum manipulators. IEEE Trans Robot Autom 18(3):263–273
Gravagne I, Rahn CD, Walker ID (2003) Large deflection dynamics and control for planar continuum robots. IEEE-ASME t Mech 8(2):299–307
Hannan MW, Walker ID (2003) Kinematics and the implementation of an Elephant’s trunk manipulator and other continuum style robots. J Robot Syst 20(2):45–63. https://doi.org/10.1002/rob.10070
Howell LL, Magleby SP, Olsen BM (eds) (2013) Handbook of compliant mechanisms. Wiley, Chichester
Hu H, Wang P, Sun L et al (2010) Kinematic Analysis and Simulation for Cable-driven Continuum Robot. Chin J Mech Eng-En 46(19):1–8
Jeong D, Lee K (2017) Design and analysis of an origami-based three-finger manipulator. Robotica. https://doi.org/10.1017/S0263574717000340
Johnson M et al (2017) Fabricating biomedical origami: a state-of-the-art review. Int J Comput Assist Radiol Surg 12(11):2023–2032
Jones BA, Walker ID (2006a) Kinematics for multisection continuum robots. IEEE Trans Robot 22(1):43–55
Jones BA, Walker ID (2006b) Practical kinematics for real-time implementation of continuum robots. IEEE Trans Robot 22(6):1087–1099
Kamrava S, Mousanezhad D, Felton SM, Vaziri A (2018) Programmable origami strings. Adv Mater Technol, 3:1700276. so as to evaluate the authenticity and eff
Laschi C, Mazzolai B, Cianchetti M, Margheri L, Follador M, Dario P (2012) A soft robot arm inspired by the octopus. Adv Robot 26(7):709–727
Lee C et al (2017) Soft robot review. Int J Control Autom Syst 15(1):3–15
Liu Y, Ge Z, Yang S, Walker ID, Ju Z (2019) Elephant’s trunk robot: an extremely versatile under-actuated continuum robot driven by a single motor. J Mech Robot 11(5):051008
Mahl T, Hildebrandt A, Sawodny O (2014) A variable curvature continuum kinematics for kinematic control of the bionic handling assistant. IEEE Trans Robot 30(4):935–949
Marchese A, Komorowski K, Onal CD, Rus D (2014) Design and control of a soft and continuously deformable 2D robotic manipulation system. ICRA, Hong Kong, pp 2189–2196
Mcmahan W, Walker I (2009) Octopus-inspired grasp-synergies for continuum manipulators, pp 945–950. https://doi.org/10.1109/ROBIO.2009.4913126
Pfeifer R, Lungarella M, Iida F (2012) The challenges ahead for bio-inspired “soft” robotics. Commun ACM 55(11):76–87 (so as to evaluate the authenticity and effectiveness)
Ranzani T, Gerboni G, Cianchetti M et al (2015) A bioinspired soft manipulator for minimally invasive surgery. Bioinspir Biomim 10(3):035008
Rone WS, Ben-Tzvi P (2014) Mechanics modeling of multisegment rod-driven continuum robots. J Mech Robot 6(4):041006
Rucker DC, Jones BB, Webster RJ (2010) A geometrically exact model for externally loaded concentric-tube continuum robots. IEEE Trans Robot 26(5):769–780
Rus D, Sung C (2018) Spotlight on origami robots. Sci Robot 3(15):eaat0938
Rus D, Tolley MT (2018) Design, fabrication and control of origami robots. Nat Rev Mater 3(6):101–112
Torres LG, Alterovitz R (2011) Motion planning for concentric tube robots using mechanics-based models. IROS, San Francisco, CA, pp 5153–5159
Wei W, Simaan N (2012) “Modeling, force sensing, and control of flexible cannulas for microstent delivery, J Dyn Syst-Trans ASME 134(4):1–12. 28 Paper No.:JMR-18–1154; Corresponding Author: Ian Walker
Yip MC, Camarillo DB (2014) Model-less feedback control of continuum manipulators in constrained environments. IEEE Trans Robot 30(4):880–889
Funding
No funds or grants were received by any of the authors.
Author information
Authors and Affiliations
Contributions
X.C. contributed to the design and methodology of this study, the assessment of the outcomes, and the writing of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
There is no conflict of interest among the authors.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chen, X. The actuation and control of a bioinspired origami manipulator. Soft Comput (2023). https://doi.org/10.1007/s00500-023-08106-y
Accepted:
Published:
DOI: https://doi.org/10.1007/s00500-023-08106-y